TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025071474
公報種別
公開特許公報(A)
公開日
2025-05-08
出願番号
2023181660
出願日
2023-10-23
発明の名称
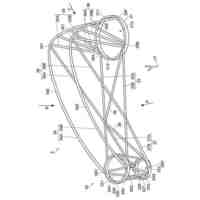
ロボット及びカバー
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
B25J
17/00 20060101AFI20250428BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】アクチュエータユニットの小型化を有利にするための技術を提供する。
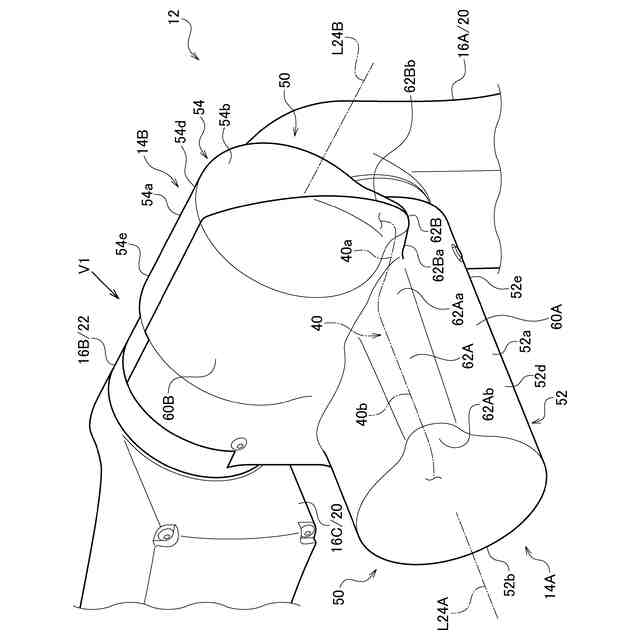
【解決手段】関節部14A、14Bと、関節部14A、14Bを駆動するアクチュエータと、アクチュエータの外側に配置される配線部材と、アクチュエータを少なくとも覆うカバー50と、を備えるロボット12であって、カバー50は、カバー本体部60A、60Bと、カバー本体部60A、60Bよりもアクチュエータから離れる方向に膨らみ、内部に配線部材が収納される配線収納部62A、62Bと、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
関節部と、前記関節部を駆動するアクチュエータと、前記アクチュエータの外側に配置される配線部材と、前記アクチュエータを少なくとも覆うカバーと、を備えるロボットであって、
前記カバーは、カバー本体部と、前記カバー本体部よりも前記アクチュエータから離れる方向に膨らみ、内部に前記配線部材が収納される配線収納部と、を備えるロボット。
続きを表示(約 930 文字)
【請求項2】
前記カバーは、少なくとも第1分割体と第2分割体とに分割されている請求項1に記載のロボット。
【請求項3】
前記配線収納部は、少なくとも前記第1分割体と前記第2分割体とにより形成される請求項2に記載のロボット。
【請求項4】
前記第1分割体と前記第2分割体との境界部は、前記配線収納部を幅方向に分割するように設けられる請求項3に記載のロボット。
【請求項5】
前記第1分割体と前記第2分割体は、前記第1分割体及び前記第2分割体の一方に設けられた係合部が他方に設けられた被係合部に係合されることで接続される請求項2に記載のロボット。
【請求項6】
前記関節部は、第1関節部と第2関節部を含み、
前記アクチュエータは、前記第1関節部を駆動する第1アクチュエータと、前記第2関節部を駆動する第2アクチュエータとを含み、
前記カバーは、前記第1アクチュエータ及び前記第2アクチュエータの両方を覆う請求項1に記載のロボット。
【請求項7】
前記配線部材は、前記第1アクチュエータの外形に沿うように配置される第1配線部と、前記第2アクチュエータの外形に沿うように配置される第2配線部とを備え、
前記配線収納部は、前記第1配線部を収納する第1配線収納部と、前記第2配線部を収納する第2配線収納部とを含む請求項6に記載のロボット。
【請求項8】
前記第1アクチュエータと前記第2アクチュエータを連結する連結部材を備え、
前記カバーは、前記連結部材を覆う請求項6に記載のロボット。
【請求項9】
前記カバーは、前記配線部材の中間部の移動を拘束する拘束部を備える請求項1に記載のロボット。
【請求項10】
アクチュエータと、アクチュエータの外側に配置される配線部材とを備えるアクチュエータユニットに用いられ、前記アクチュエータを覆うカバーであって、
カバー本体部と、
前記カバー本体部よりも前記アクチュエータから離れる方向に膨らみ、内部に前記配線部材が収納される配線収納部と、を備えるカバー。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット等のアクチュエータユニットに用いられるカバーに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1は、アクチュエータと、アクチュエータの外側に配置される配線部材と、アクチュエータを覆うカバーとを備えるアクチュエータユニットを開示している。このアクチュエータユニットは、関節部と、関節部を駆動するアクチュエータとを備えるロボットとして構成されている。
【先行技術文献】
【特許文献】
【0003】
特開平03-121791号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の構造のもとでは、アクチュエータとカバーとの間に配線部材を配置するうえで、カバーに特段の工夫を講じていない。本願発明者は、アクチュエータユニットの小型化を図るうえで、特許文献1の開示技術に関して改良の余地があるとの認識を得た。
【0005】
本開示の目的の1つは、アクチュエータユニットの小型化を有利にするための技術を提供することにある。
【課題を解決するための手段】
【0006】
本開示のある態様のロボットは、関節部と、前記関節部を駆動するアクチュエータと、前記アクチュエータの外側に配置される配線部材と、前記アクチュエータを少なくとも覆うカバーと、を備えるロボットであって、前記カバーは、カバー本体部と、前記カバー本体部よりも前記アクチュエータから離れる方向に膨らみ、内部に前記配線部材が収納される配線収納部と、を備える。
【0007】
本開示のある態様のカバーは、アクチュエータと、アクチュエータの外側に配置される配線部材とを備えるアクチュエータユニットに用いられ、前記アクチュエータを覆うカバーであって、カバー本体部と、前記カバー本体部よりも前記アクチュエータから離れる方向に膨らみ、内部に前記配線部材が収納される配線収納部と、を備える。
【発明の効果】
【0008】
本開示によれば、アクチュエータユニットの小型化を有利にすることができる。
【図面の簡単な説明】
【0009】
実施形態のロボットの斜視図である。
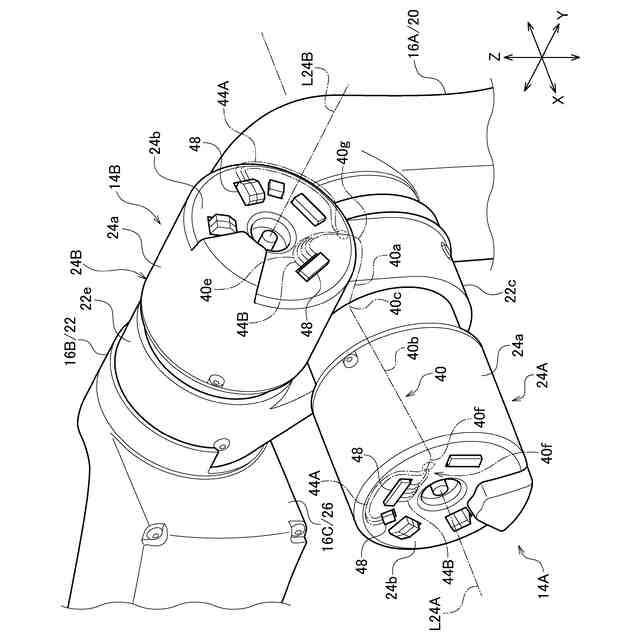
図1の範囲S1の拡大図である。
図2からカバーを省略した斜視図である。
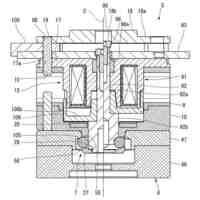
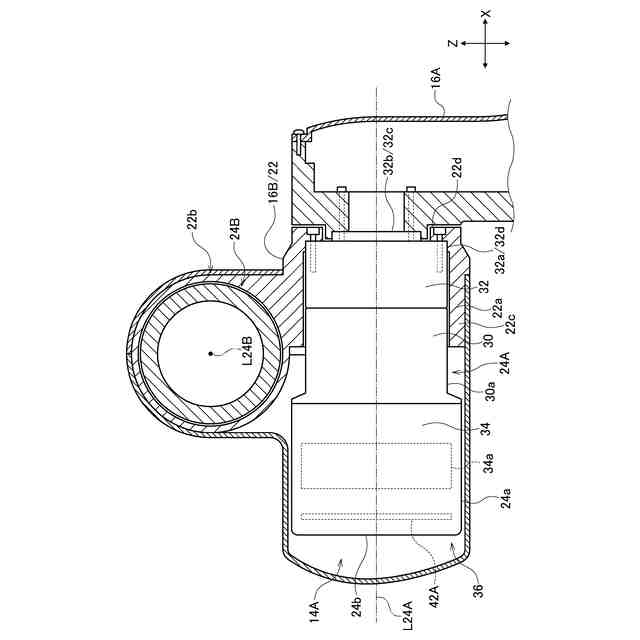
図2の第1出力軸線L24Aに沿って切断した断面の一部とともにアクチュエータを模式的に示す正面断面図である。
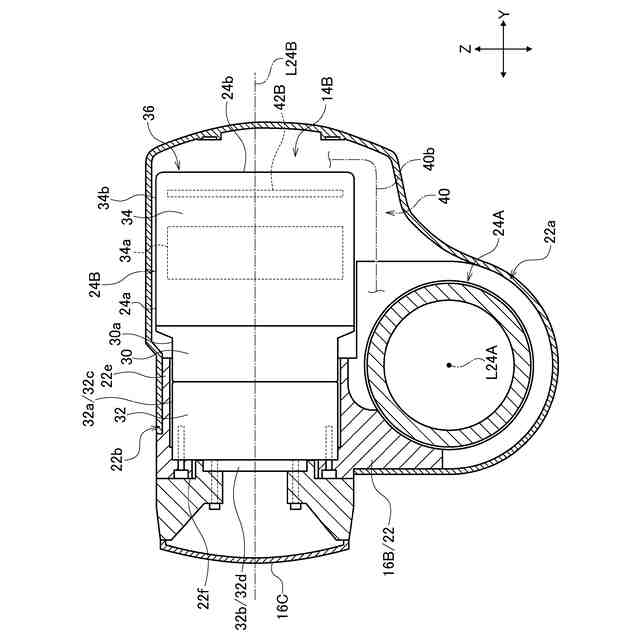
図2の第2出力軸線L24Bに沿って切断した断面の一部とともにアクチュエータを模式的に示す左側面断面図である。
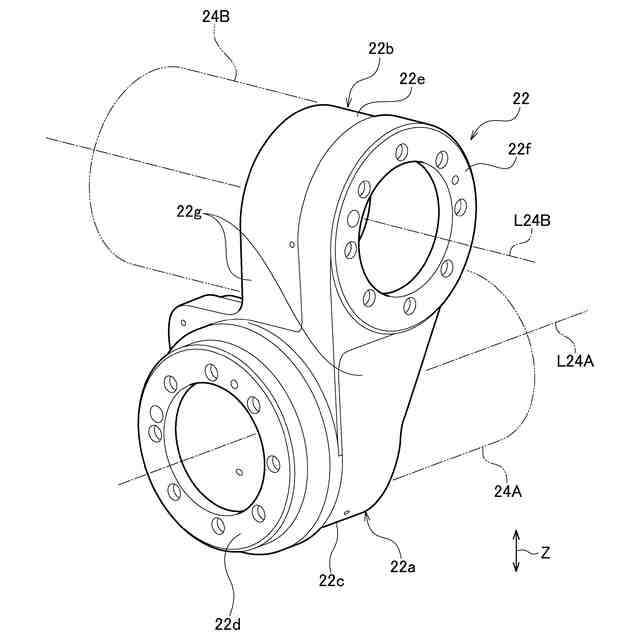
図2の矢視V1から連結部材を見た斜視図である。
図3の一部を正面から見た図である。
図6と同じ視点からカバーと連結部材を見た斜視図である。
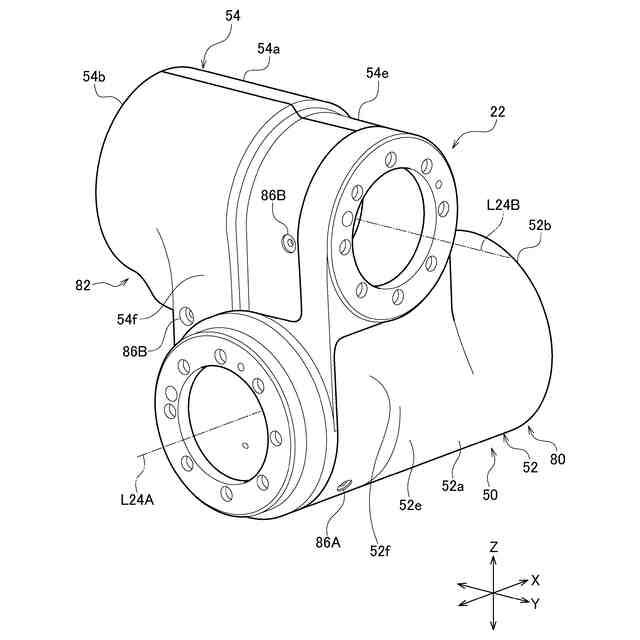
図6と同じ視点からカバーを見た斜視図である。
実施形態のカバーの正面図である。
実施形態のカバーの左側面図である。
図10のXII-XII断面の一部を示す図である。
図11のXIII-XIII断面の一部を示す図である。
図1の範囲S1の一部を正面から見た分解図である。
図13と同じ視点からカバーのみを見た断面図である。
図15のXVI-XVI断面図である。
図17(A)は、図12の矢視V2から見た変形形態のカバーを示す模式図であり、図17(B)は、図17(A)のA-A断面図である。
実施形態のカバーの斜視図である。
実施形態のカバーの上面図である。
実施形態のカバーの右側面図である。
実施形態のカバーの下面図である。
実施形態のカバーの背面図である。
実施形態のカバーの他の正面図である。
実施形態のカバーの他の左側面図である。
実施形態のカバーの他の斜視図である。
実施形態のカバーの更に他の斜視図である。
【発明を実施するための形態】
【0010】
以下、本開示のアクチュエータユニットを実施するための実施形態を説明する。同一又は同等の要素には同一の符号を付し、重複する説明を省略する。各図面では、説明の便宜のため、適宜、構成要素を省略、拡大、縮小する。図面は符号の向きに合わせて見るものとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1日前
日東精工株式会社
電動ドライバ
25日前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
28日前
東京都公立大学法人
対象物把持装置
1か月前
工機ホールディングス株式会社
作業機
16日前
工機ホールディングス株式会社
作業機
16日前
株式会社スター精機
吸着パッド
24日前
工機ホールディングス株式会社
作業機
16日前
株式会社スター精機
吸着パッド
24日前
学校法人五島育英会
アーム機構
1か月前
住友重機械工業株式会社
ロボット
1か月前
株式会社PILLAR
チューブ保持治具
1か月前
庄内機械株式会社
釘打装置
1か月前
株式会社アイエイアイ
グリッパー
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社スター精機
産業用ロボット
22日前
オークラ輸送機株式会社
ハンド装置
9日前
川崎重工業株式会社
ロボットシステム
10日前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
電動作業機
1か月前
トヨタ自動車東日本株式会社
搬送治具
1か月前
株式会社リコー
多関節ロボット
29日前
芝浦機械株式会社
双腕ロボット
1か月前
株式会社ジャノメ
ロボット
18日前
株式会社ダイヘン
ロボット制御システム
28日前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社安川電機
ロボット
22日前
株式会社安川電機
ロボット
22日前
株式会社安川電機
ロボット
22日前
セイコーエプソン株式会社
ロボット
24日前
小倉クラッチ株式会社
ロボット用ツール交換装置
24日前
セイコーエプソン株式会社
ロボット
4日前
株式会社マキタ
回転工具
11日前
住友重機械工業株式会社
ロボット及びカバー
1か月前
個人
回転移動式工具ホルダ
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ