TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025072187
公報種別
公開特許公報(A)
公開日
2025-05-09
出願番号
2023182770
出願日
2023-10-24
発明の名称
双腕ロボット
出願人
芝浦機械株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20250430BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】双腕ロボットにおける左右のアームの部材を共通化し、部材の種類の増加を抑制することを目的とする。
【解決手段】一つの実施形態によれば、双腕ロボットは、第1アームを備える。さらに、双腕ロボットは、胴体を中心として、第1アームと鏡写しの形状である第2アームとを備える。さらにアームの各々は、アームを駆動するモータユニットを含む。さらにアームの各々は、モータユニットを保護するアームカバーであって、第1方向に第1孔を有し、第2方向に第1孔と外枠の形状が同一である第2孔を有するアームカバーを含む。さらにアームの各々は、モータユニットを搭載する第2アームベースを含む。さらにアームの各々は、一方が第2アームベースと接続され、他方が胴体と回動可能に接続される第1アームベースを含む。さらに、アームカバーと、モータユニットと、第1アームベースと、第2アームベースとは、各アームで共通部材である。
【選択図】図4
特許請求の範囲
【請求項1】
第1アームと、
胴体を中心として、前記第1アームと鏡写しの形状である第2アームとを備え、
前記第1アーム及び前記第2アームの各々は、
前記第1アームまたは前記第2アームを駆動するモータユニットと、
前記モータユニットを保護するアームカバーであって、第1方向に第1孔を有し、前記第1方向とは対向側の第2方向に、前記第1孔と外枠の形状が同一である第2孔を有するアームカバーと、
前記モータユニットを搭載する第2アームベースと、
一方が前記第2アームベースと接続され、他方が胴体と回動可能に接続される第1アームベースとを含み、
前記アームカバーと、前記モータユニットと、前記第1アームベースと、前記第2アームベースとは、前記第1アームの及び前記第2アームで共通部材である、
双腕ロボット。
続きを表示(約 270 文字)
【請求項2】
前記アームカバー、前記第1アームベース及び前記第2アームベースは、シンメトリー構造である、請求項1に記載の双腕ロボット。
【請求項3】
前記第1孔には、第1駒部材が装着され、
前記第2孔には、前記第1駒部材と同一な外枠を有する第2駒部材が装着される、
請求項1に記載の双腕ロボット。
【請求項4】
前記第1駒部材は、配線孔となるケーブルダクトである、請求項3に記載の双腕ロボット。
【請求項5】
前記第2駒部材は、塞ぎ板である、請求項3に記載の双腕ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、双腕ロボットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
双腕ロボットは、人のようなデザインにするため、胴体を中心に対称であることが多い。そのため、アーム単体もシンメトリーなデザインが多い。アーム単体の形状がアシンメトリーである双腕ロボットは、双腕ロボットの胴体を中心として、左右のアームは鏡写しの形状となることが多い。
【0003】
また、左右のアーム単体の形状がシンメトリーであれば、各アームにおける部材の共通化や構造の単純化が容易である反面、協調動作のため、2本のアームは胴体の上方向や横方向に配置される。そのため、そのような双腕ロボットは、外側にアームが張り出しやすい。
【0004】
一方、双腕ロボットは、左右のアーム単体が胴体を中心として鏡写しの形状であれば、モータやフレームを胴体の外側に配置することで、懐に広い空間を確保することができ、協調動作に有利であるが、部材の共通化が困難となる。
【先行技術文献】
【特許文献】
【0005】
特開2005-238350号公報
特開2007-118177号公報
特開2019-77031号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
双腕ロボットにおける左右のアームの部材を共通化し、部材の種類の増加を抑制することを目的とする。
【課題を解決するための手段】
【0007】
一つの実施形態によれば、双腕ロボットは、第1アームを備える。さらに、双腕ロボットは、胴体を中心として、第1アームと鏡写しの形状である第2アームとを備える。さらにアームの各々は、アームを駆動するモータユニットを含む。さらにアームの各々は、モータユニットを保護するアームカバーであって、第1方向に第1孔を有し、第2方向に第1孔と外枠の形状が同一である第2孔を有するアームカバーを含む。さらにアームの各々は、モータユニットを搭載する第2アームベースを含む。さらにアームの各々は、一方が第2アームベースと接続され、他方が胴体と回動可能に接続される第1アームベースを含む。さらに、アームカバーと、モータユニットと、第1アームベースと、第2アームベースとは、各アームで共通部材である。
【図面の簡単な説明】
【0008】
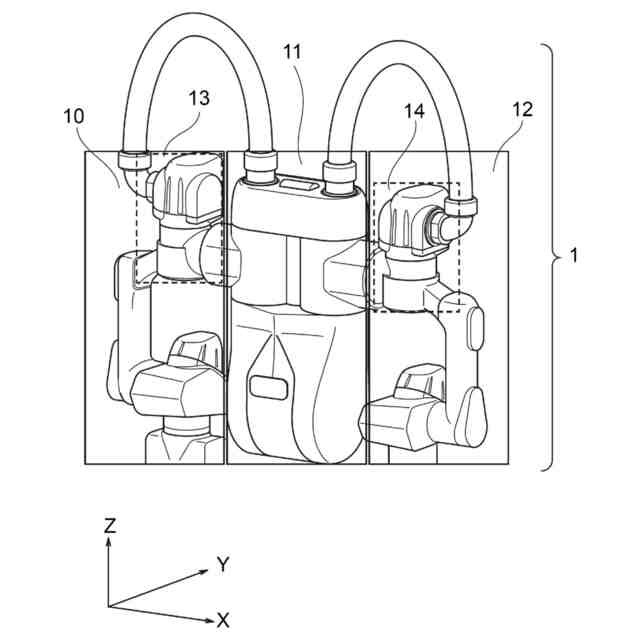
本実施形態における双腕ロボット1の斜視図である。
第1比較例における双腕ロボットの動作を説明する図である。
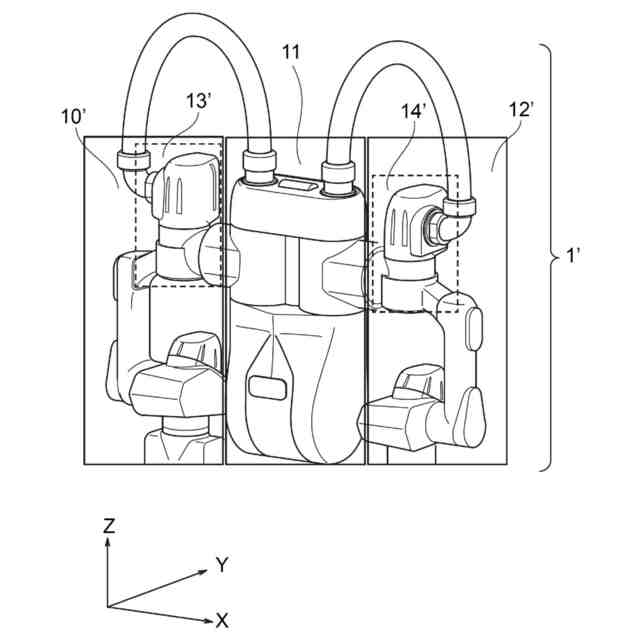
第2比較例における双腕ロボット1’の構造を説明する図である。
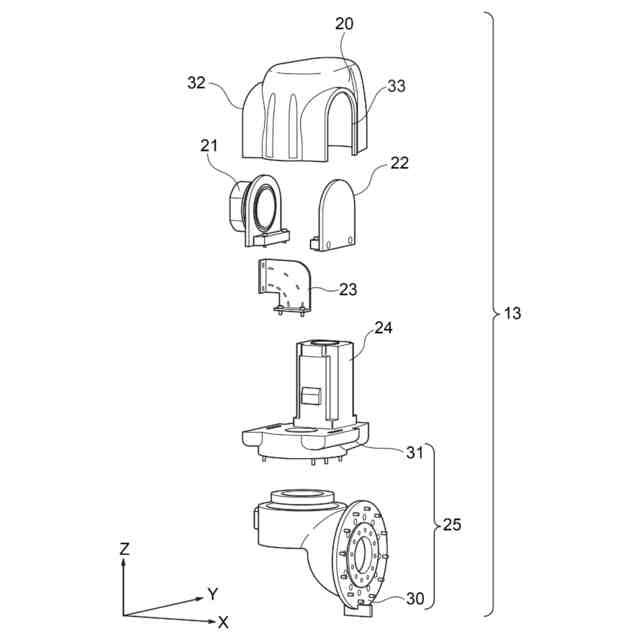
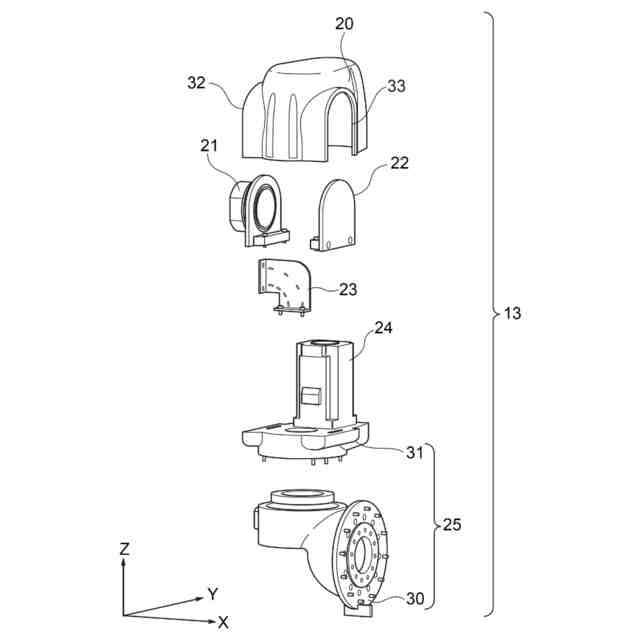
本実施形態における右アーム用部材13の分解図である。
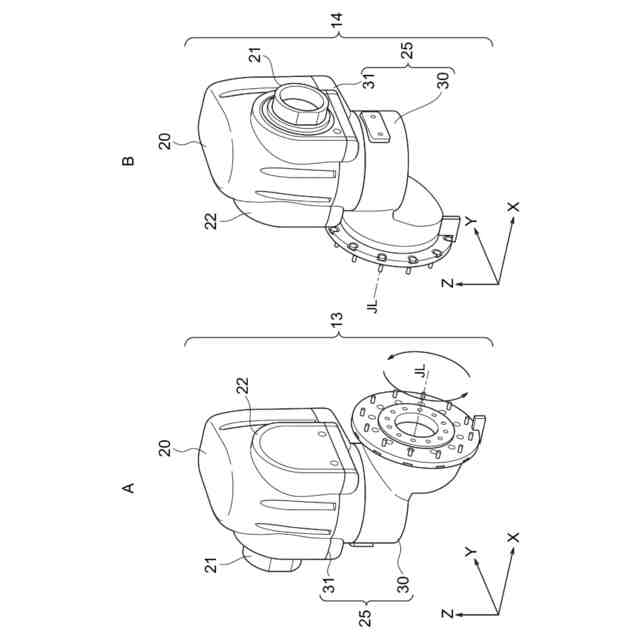
本実施形態における右アーム用部材13及び左アーム用部材14の外観図である。
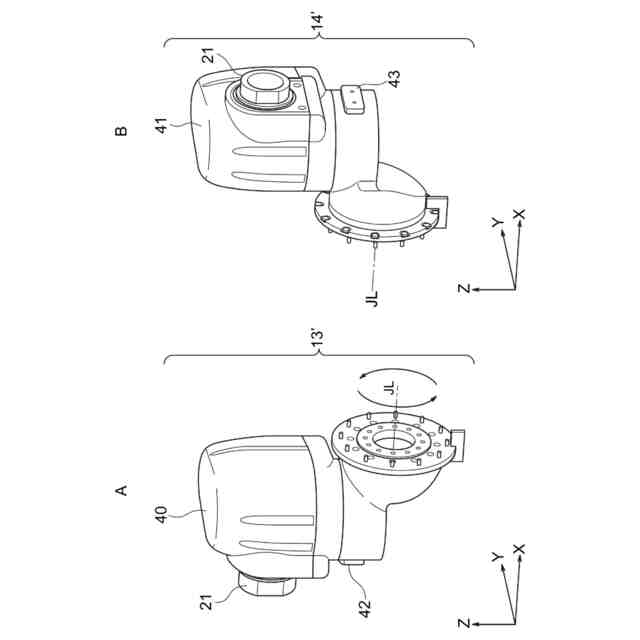
第2比較例における右アーム用部材13’及び左アーム用部材14’の外観図である。
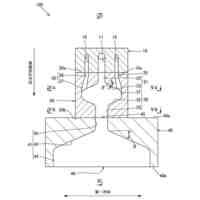
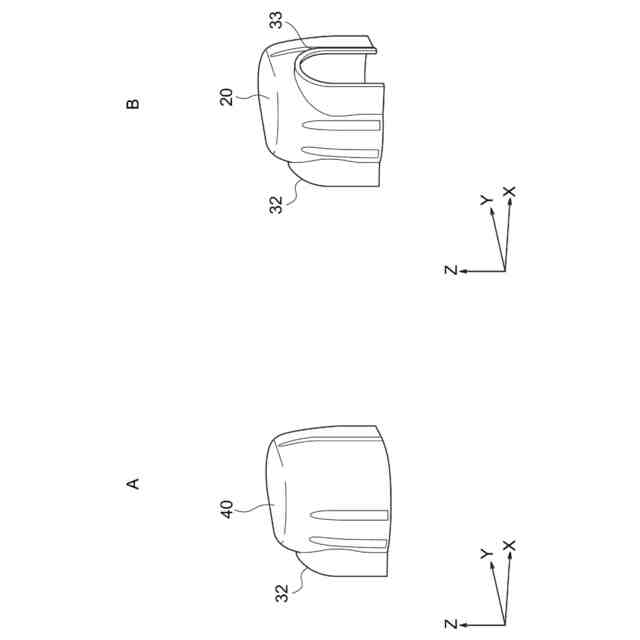
本実施形態におけるアームカバー20と、第2比較例における右アームカバー40との比較図である。
本実施形態におけるハーネスダクト21及び塞ぎ板22の外観図である。
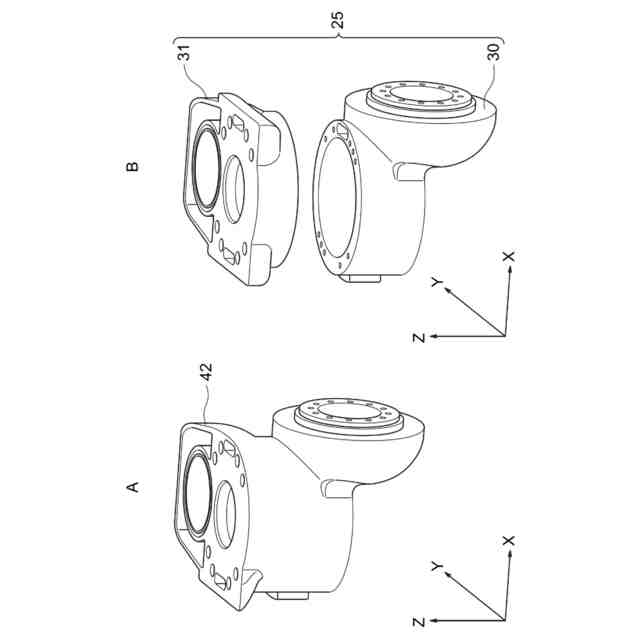
本実施形態におけるアームベース25及び第2比較例における右アームベース42の外観図である。
本実施形態における左アーム用部材14及び右アーム用部材13の分解図である。
本実施形態における左アーム用部材14の別の外観図である。
第2比較例における右アーム用部材13’及び左アーム用部材14’の分解図である。
【発明を実施するための形態】
【0009】
以下、本開示の実施形態を、図面を参照して説明する。本実施形態は、本発明を限定するものではない。図面は模式的または概念的なものであり、各部分の比率などは、必ずしも現実のものと同一とは限らない。明細書と図面において、既出の図面に関して前述したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0010】
図1は、本実施形態における双腕ロボット1の斜視図である。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
芝浦機械株式会社
フィードブロック及びTダイ
1か月前
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
移動体
2か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社スター精機
吸着パッド
2か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
2か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
株式会社マキタ
電気機器
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社スター精機
産業用ロボット
2か月前
アピュアン株式会社
衝撃工具
1か月前
積水ハウス株式会社
フィルム除去具
6日前
ホシデン株式会社
分解用治具
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
2か月前
株式会社リコー
多関節ロボット
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
11日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社安川電機
ロボット
2か月前
株式会社清水製作所
電動工具の吊下げ具
15日前
株式会社安川電機
ロボット
2か月前
株式会社不二越
ロボットシステム
今日
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ