TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025068930
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2023179062
出願日
2023-10-17
発明の名称
ネジ締めカウントシステム
出願人
アイホン株式会社
代理人
個人
主分類
B25B
23/14 20060101AFI20250422BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 ネジ締めのカウントミスを防止でき、生産性の向上に寄与できるネジ締めカウントシステムを提供する。
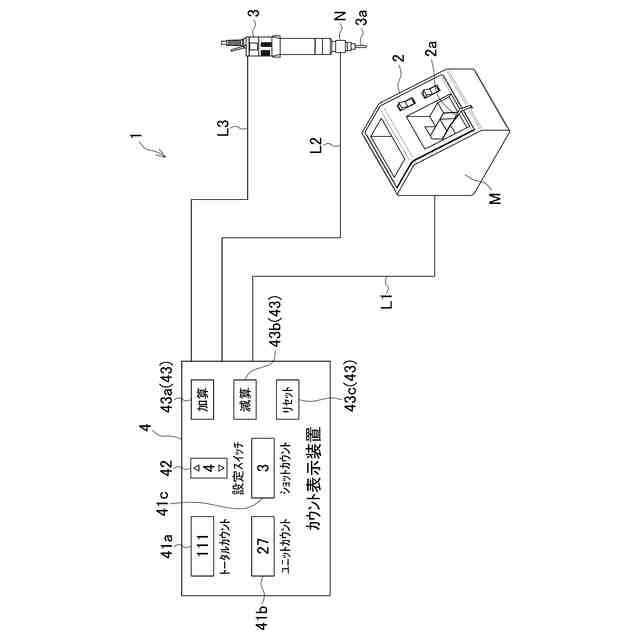
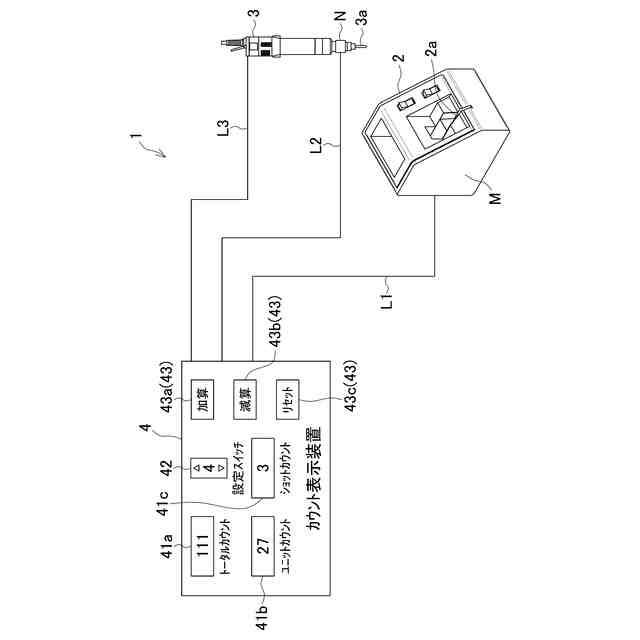
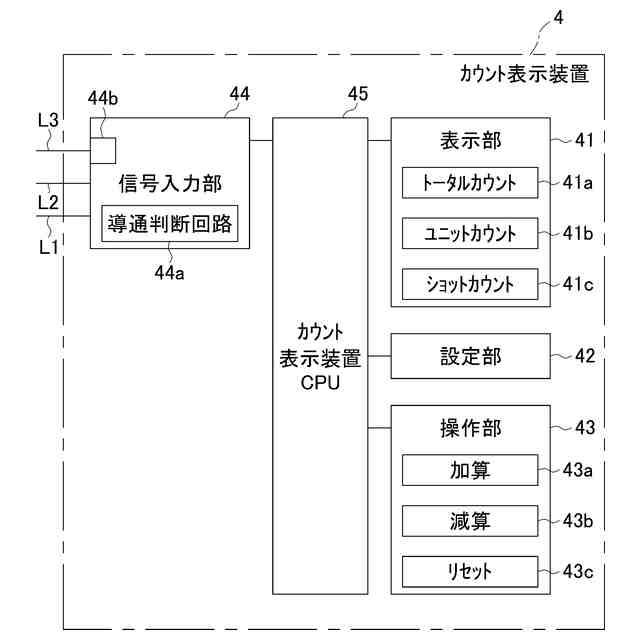
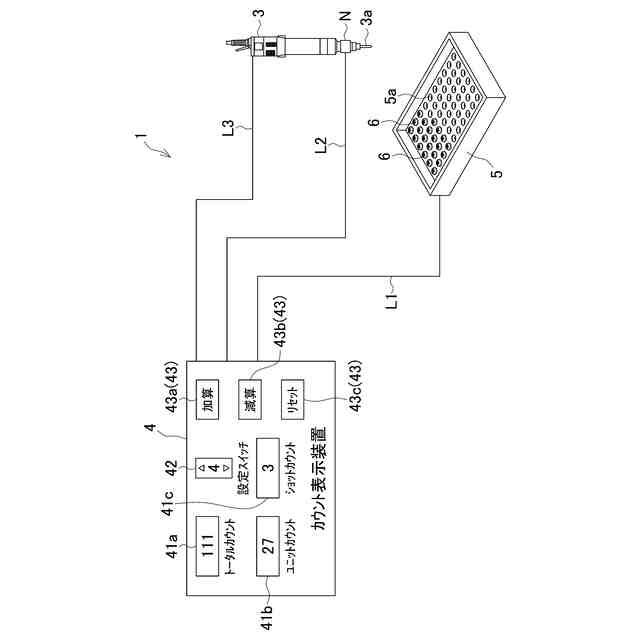
【解決手段】 ネジ供給器2と電動ドライバ3とネジ締め数を表示するカウント表示装置4とを有し、ネジ供給器2は取り出されるネジのガイド部材2aが導電性を有する部材で形成され、カウント表示装置4は、ガイド部材2aと電動ドライバ3のビット3aとが電気的に導通状態になったらピックアップ信号を生成する導通判断回路44aと、電動ドライバ3が出力するトルクアップ信号を入力するトルクアップ信号入力部44bと、ネジ締め完了と判断した数を表示する表示部41とを有している。カウント表示装置CPU45は、ピックアップ信号とトルクアップ信号との双方の信号を基にネジ締め完了を判断し、導通判断回路44aがピックアップ信号を生成した状態でトルクアップ信号を検出したら、ネジ締め完了と判断する。
【選択図】 図1
特許請求の範囲
【請求項1】
ネジ提供手段と、電動ドライバと、ネジ締め数を表示するカウント表示装置とを有するネジ締めカウントシステムであって、
前記ネジ提供手段は、取り出されるネジの収容部が導電性を有する部材で形成され、
前記カウント表示装置は、前記収容部と前記電動ドライバのビットとが電気的に導通状態になったらピックアップ信号を生成するピックアップ検知部と、
前記電動ドライバが出力するトルクアップ信号を入力するトルクアップ信号入力部と、
ネジ締め完了を判断するネジ締め判断部と、
ネジ締め完了と判断した数を表示する表示部と、を有し、
前記ネジ締め判断部は、前記ピックアップ検知部がピックアップ信号を生成した状態で、前記トルクアップ信号を検出したら、ネジ締め完了と判断することを特徴とするネジ締めカウントシステム。
続きを表示(約 180 文字)
【請求項2】
ネジ提供手段が、前記電動ドライバによりネジが取り出される度に順次ネジを前記収容部に送り出す機構を備えたネジ供給器であり、
前記ピックアップ検知部は、前記収容部の一部を成すガイド部材と前記電動ドライバのビットとが、電気的に導通状態になったらピックアップ信号を生成することを特徴とする請求項1記載のネジ締めカウントシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動ドライバを使用して回路基板等をネジ締め固定する場合に、ネジ締め漏れを防止するためのネジ締めカウントシステムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来より、ネジ締め忘れを防止するシステムがある。例えば特許文献1では、設定トルク値に達したらトルクアップ信号を出力する電動ドライバーと、ネジ締め本数を表示する作業結果表示装置とを有して、電動ドライバーから出力されるトルクアップ信号とモータの回転信号と基に作業結果表示装置がネジ締め完了を判断してネジ締め本数を表示した。この表示により、ネジ締めしたネジの数が一目でわかるため、ネジ締め忘れをチェックできた。
【先行技術文献】
【特許文献】
【0003】
特開2017-189837号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1の技術は、ネジ締め時間とトルクアップ信号の双方の情報からネジ締め完了を判断するため、同一のネジを確認のため2回ネジ締めしたとしても、2本のネジ締め完了と判断するのを防止できた。
これは、基準時間以下でトルクアップ信号が出力された場合は、ネジ締めが正しく行われなかったと判断したためであるが、同一のネジがねじ孔の不具合やネジが斜めに入り込んだ等で複数回ネジ締め作業された場合、複数回のネジ締め完了と判断してしまう問題を排除できなかった。そのため、ネジ締め忘れがあったとしても、表示されたネジ締めカウント数が必要数に達している状況が発生し、締め忘れがあるのを認識できずに、生産性が低下する問題が引き続き発生した。
【0005】
そこで、本発明はこのような問題点に鑑み、ネジ締めのカウントミスを防止でき、生産性の向上に寄与できるネジ締めカウントシステムを提供することを目的としている。
【課題を解決するための手段】
【0006】
上記課題を解決する為に、本発明に係るネジ締めカウントシステムは、ネジ提供手段と、電動ドライバと、ネジ締め数を表示するカウント表示装置とを有し、ネジ提供手段は、取り出されるネジの収容部が導電性を有する部材で形成され、カウント表示装置は、収容部と電動ドライバのビットとが電気的に導通状態になったらピックアップ信号を生成するピックアップ検知部と、電動ドライバが出力するトルクアップ信号を入力するトルクアップ信号入力部と、ネジ締め完了を判断するネジ締め判断部と、ネジ締め完了と判断した数を表示する表示部と、を有し、ネジ締め判断部は、ピックアップ検知部がピックアップ信号を生成した状態で、トルクアップ信号を検出したら、ネジ締め完了と判断することを特徴とする。
この構成によれば、ネジ提供手段と電動ドライバのビットとの間がネジを介して導通状態状態となるのを検知しなければ、即ち電動ドライバによりネジが取り出される動作がなければ、トルクアップ信号を検知してもネジ締め完了とは判断しない。そのため、同一のネジのネジ締め作業が複数回行われても、ネジ締め数のカウントが増加する事が無いし、ピックアップ信号を複数回検出しても、トルクアップ信号を生成しなけれがネジ締めをカウントしない。よって、ネジ締めカウントミスを防止でき、生産性の向上に寄与できる。
【0007】
本発明の別の態様は、上記構成において、ネジ提供手段が、電動ドライバによりネジが取り出される度に順次ネジを収容部に送り出す機構を備えたネジ供給器であり、ピックアップ検知部は、収容部の一部を成すガイド部材と電動ドライバのビットとが、電気的に導通状態になったらピックアップ信号を生成することを特徴とする。
この構成によれば、ネジ供給器を使用してもネジ供給器のガイド部材とビットとが導通状態になったらピックアップ信号を生成するため、簡易な構成でピックアップ信号を生成できる。
【発明の効果】
【0008】
本発明によれば、ネジ提供手段と電動ドライバのビットとの間がネジを介して導通状態状態となるのを検知しなければ、即ち電動ドライバによりネジが取り出される動作がなければ、トルクアップ信号を検知してもネジ締め完了とは判断しない。そのため、同一のネジのネジ締め作業が複数回行われても、ネジ締め数のカウントが増加する事が無いし、ピックアップ信号を複数回検出しても、トルクアップ信号を生成しなけれがネジ締めをカウントしない。よって、ネジ締めカウントミスを防止でき、生産性の向上に寄与できる。
【図面の簡単な説明】
【0009】
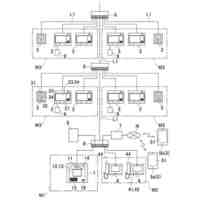
本発明に係るネジ締めカウントシステムの一例を示す構成図である。
カウント表示装置のブロック図である。
ネジ締めカウントシステムの他の例を示す構成図である。
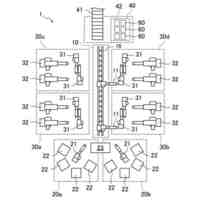
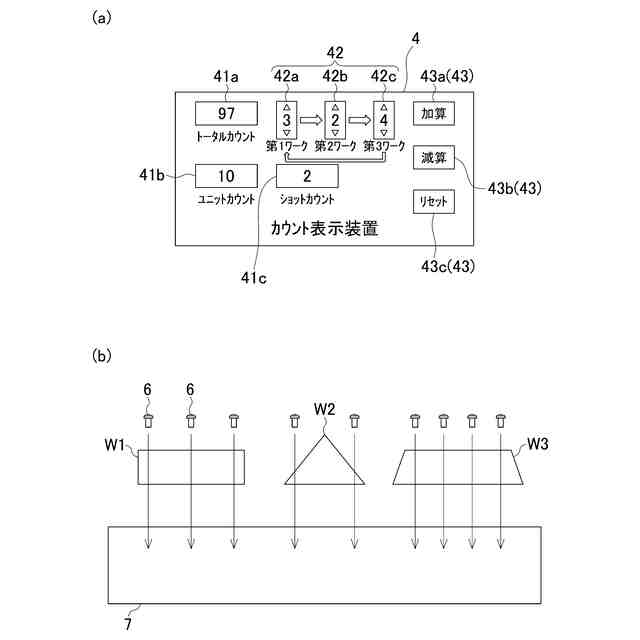
カウント表示装置の他の形態を示し、(a)は正面図、(b)はこのカウント表示装置に対応するユニットの説明図である。
【発明を実施するための形態】
【0010】
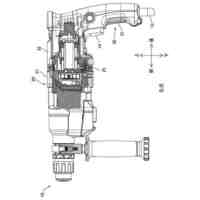
以下、本発明を具体化した実施の形態を、図面を参照して詳細に説明する。図1は本発明に係るネジ締めカウントシステムの一例を示す構成図である。
ネジ締めカウントシステム1は、ネジ供給器(ネジ提供手段)2、電動ドライバ3、カウント表示装置4により構成されている。
ネジ供給器2は、電動ドライバ3によりピックアップされるネジを送り出す機構を備えた機器であり、市販のものが使用できる。例えばエントラスト社FKー505が使用できる。また、電動ドライバ3はネジ締めを判断できるトルクアップ信号が出力されるものが使用され、例えば日東工器DLV8030が使用できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アイホン株式会社
電気機器
1日前
アイホン株式会社
機器の設置構造
1日前
アイホン株式会社
機器の設置構造
1日前
アイホン株式会社
インターホンシステム
1か月前
アイホン株式会社
インターホンシステム
1か月前
アイホン株式会社
インターホンシステム
1か月前
アイホン株式会社
ケース体における防水構造
1日前
アイホン株式会社
集合住宅インターホンシステム
9日前
アイホン株式会社
集合住宅インターホンシステム
9日前
株式会社PacPort
サーバ装置、エレベータ制御装置、及びプログラム
1か月前
株式会社PacPort
サーバ装置、エレベータ制御装置、及びプログラム
1か月前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
搬送装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
1か月前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
株式会社マキタ
電気機器
1か月前
アピュアン株式会社
衝撃工具
1か月前
積水ハウス株式会社
フィルム除去具
10日前
ホシデン株式会社
分解用治具
1か月前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
15日前
工機ホールディングス株式会社
作業機
1か月前
株式会社清水製作所
電動工具の吊下げ具
19日前
株式会社不二越
ロボットシステム
4日前
SMC株式会社
ベルヌーイグリッパ
1か月前
コネクテッドロボティクス株式会社
保持システム
12日前
川崎重工業株式会社
作業設備
16日前
株式会社マキタ
打撃工具
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ