TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025063454
公報種別
公開特許公報(A)
公開日
2025-04-16
出願番号
2023172661
出願日
2023-10-04
発明の名称
インパクト工具
出願人
株式会社マキタ
代理人
弁理士法人酒井国際特許事務所
主分類
B25B
21/02 20060101AFI20250409BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】インパクト工具の打撃力を向上すること。
【解決手段】インパクト工具は、モータと、モータにより回転されるスピンドルと、スピンドルに形成されるスピンドル溝と、スピンドル溝に保持されるボールと、ボールを介してスピンドルに支持されるハンマと、ハンマを前方に付勢するスプリングと、ハンマにより回転方向に打撃されるアンビルと、を備える。スピンドル溝の深さは、スピンドルの軸方向の位置により異なる。
【選択図】図21
特許請求の範囲
【請求項1】
モータと、
前記モータにより回転されるスピンドルと、
前記スピンドルに形成されるスピンドル溝と、
前記スピンドル溝に保持されるボールと、
前記ボールを介して前記スピンドルに支持されるハンマと、
前記ハンマを前方に付勢するスプリングと、
前記ハンマにより回転方向に打撃されるアンビルと、を備え、
前記スピンドル溝の深さは、前記スピンドルの軸方向の位置により異なる、
インパクト工具。
続きを表示(約 770 文字)
【請求項2】
前記スピンドル溝の後部の深さは、前記スピンドル溝の前部の深さよりも深い、
請求項1に記載のインパクト工具。
【請求項3】
前記スピンドル溝の端部の深さは、前記スピンドル溝の中央部の深さよりも深い、
請求項2に記載のインパクト工具。
【請求項4】
モータと、
前記モータにより回転されるスピンドルと、
前記スピンドルに形成されるスピンドル溝と、
前記スピンドル溝に保持されるボールと、
前記ボールを介して前記スピンドルに支持されるハンマと、
前記ハンマを前方に付勢するスプリングと、
前記ハンマにより回転方向に打撃されるアンビルと、を備え、
前記スピンドル溝は、切削工具により形成され、
前記スピンドル溝を形成するときの前記切削工具の中心の軌道の少なくとも一部は、前記スピンドルの外周面よりも径方向内側に配置される、
インパクト工具。
【請求項5】
前記スピンドル溝の端部は、前記スピンドル溝の中央部よりも後方に配置され、
前記スピンドルに対して前記ハンマが後方に移動するときに、前記ボールが前記スピンドル溝の端部に移動し、
前記スピンドル溝の端部において、前記切削工具の中心は、前記スピンドルの外周面よりも径方向内側に配置される、
請求項4に記載のインパクト工具。
【請求項6】
前記スピンドル溝の中央部において、前記切削工具の中心は、前記スピンドルの外周面よりも径方向外側に配置される、
請求項5に記載のインパクト工具。
【請求項7】
前記スピンドル溝は、円弧状である、
請求項4に記載のインパクト工具。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、インパクト工具に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
インパクト工具に係る技術分野において、特許文献1に開示されているようなインパクト回転工具が知られている。
【先行技術文献】
【特許文献】
【0003】
特許第4600562号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
インパクト工具を用いる作業性の向上のために、インパクト工具の打撃力を向上して、ねじの締付速度を向上できる技術が要望される。
【0005】
本明細書で開示する技術は、インパクト工具の打撃力を向上することを目的とする。
【課題を解決するための手段】
【0006】
本明細書は、インパクト工具を開示する。インパクト工具は、モータと、モータにより回転されるスピンドルと、スピンドルに形成されるスピンドル溝と、スピンドル溝に保持されるボールと、ボールを介してスピンドルに支持されるハンマと、ハンマを前方に付勢するスプリングと、ハンマにより回転方向に打撃されるアンビルと、を備える。スピンドル溝の深さは、スピンドルの軸方向の位置により異なる。
【発明の効果】
【0007】
本明細書で開示する技術によれば、インパクト工具の打撃力が向上する。
【図面の簡単な説明】
【0008】
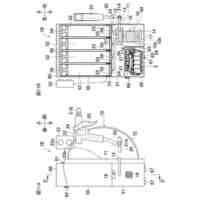
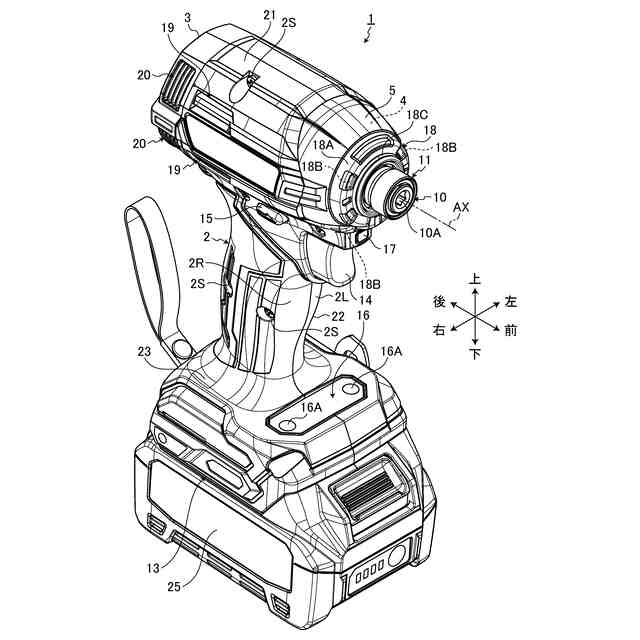
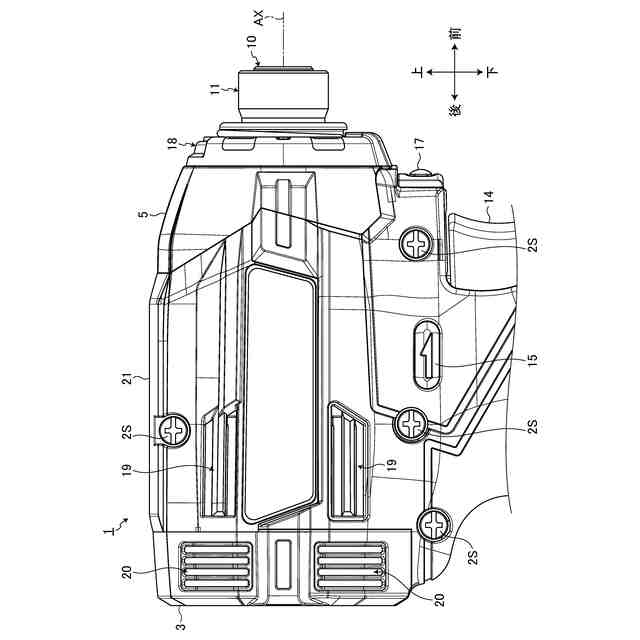
図1は、実施形態に係るインパクト工具を示す前方からの斜視図である。
図2は、実施形態に係るインパクト工具の上部を示す側面図である。
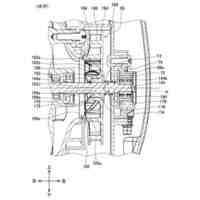
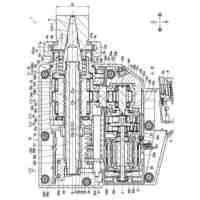
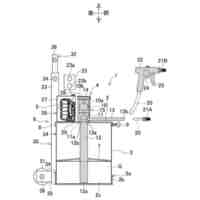
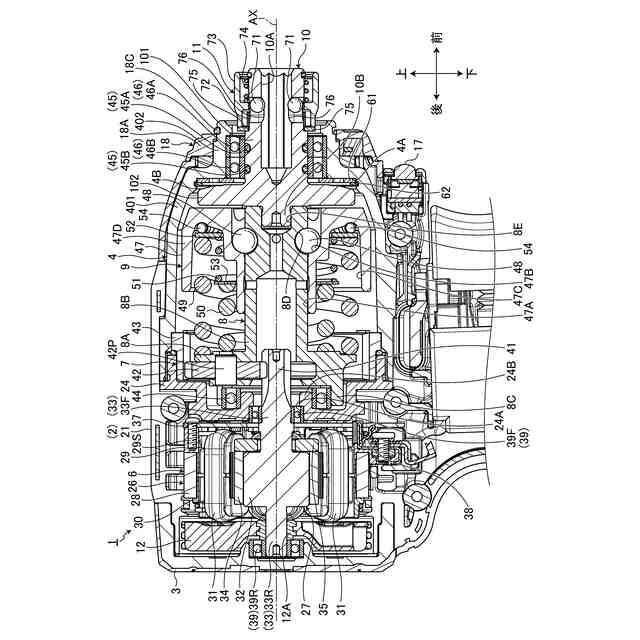
図3は、実施形態に係るインパクト工具の上部を示す縦断面図である。
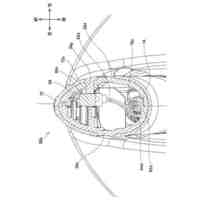
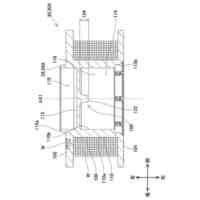
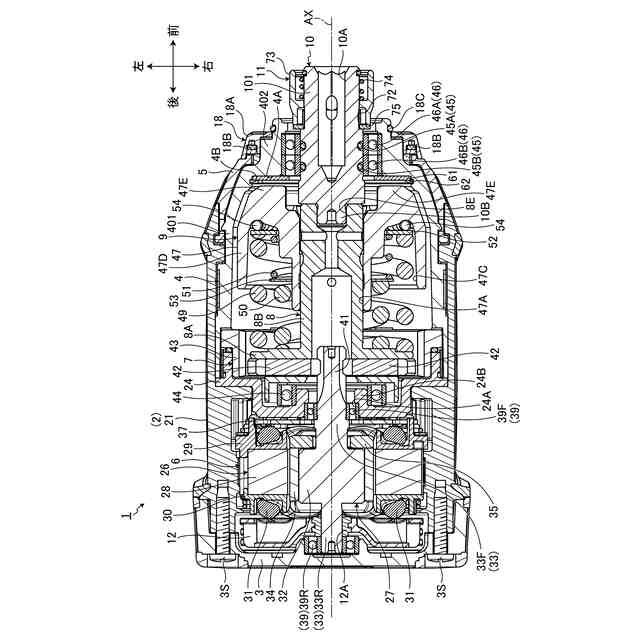
図4は、実施形態に係るインパクト工具の上部を示す横断面図である。
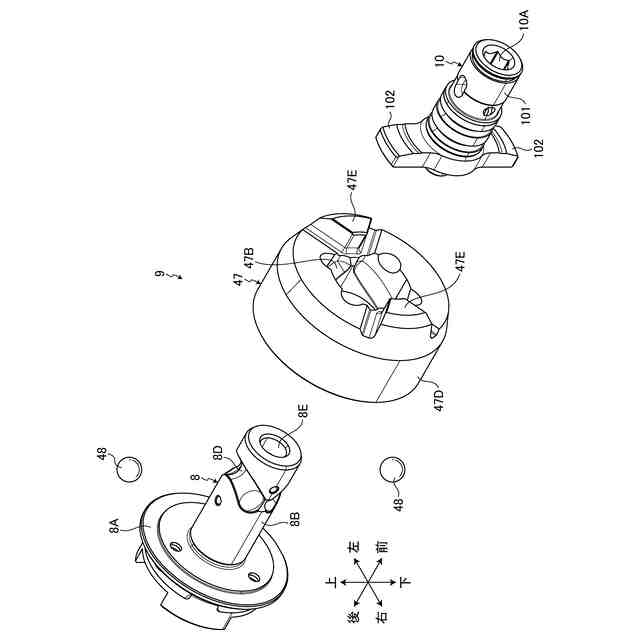
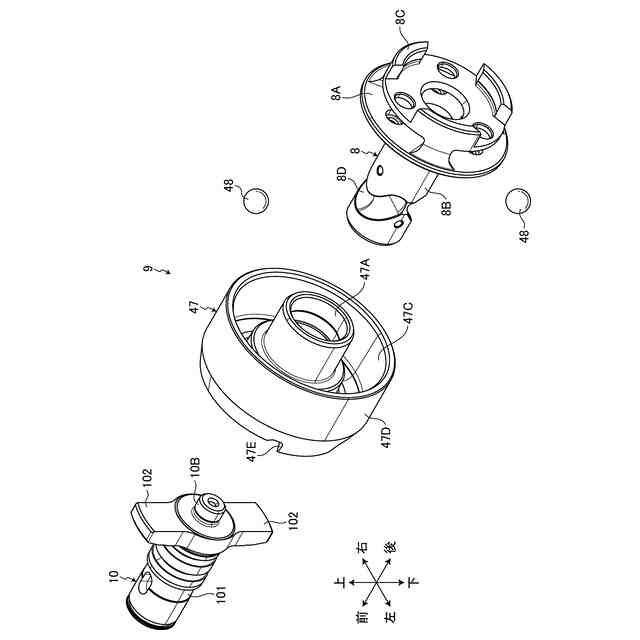
図5は、実施形態に係る打撃機構の一部を示す前方からの分解斜視図である。
図6は、実施形態に係る打撃機構の一部を示す後方からの分解斜視図である。
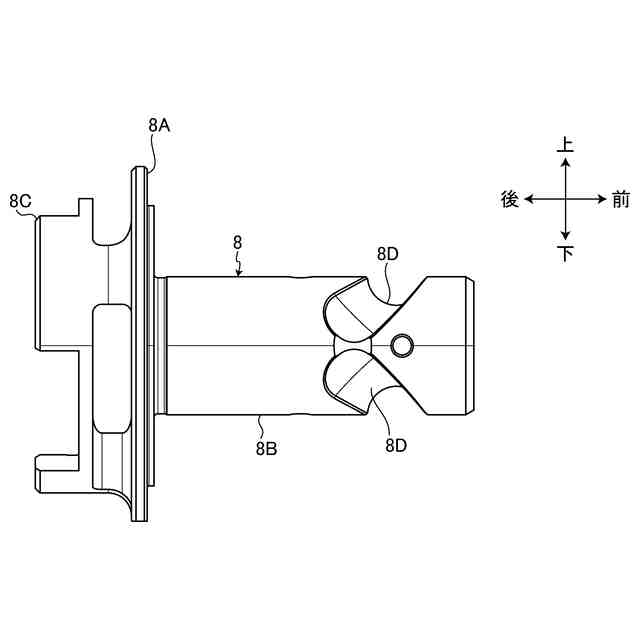
図7は、実施形態に係るスピンドルを示す側面図である。
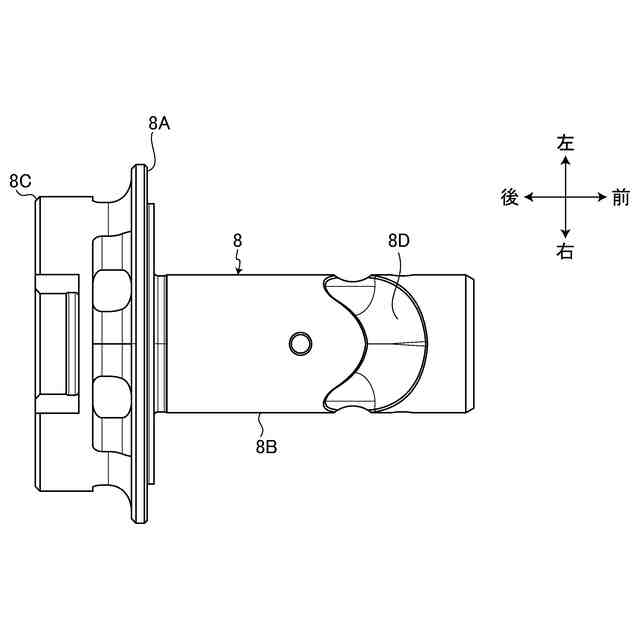
図8は、実施形態に係るスピンドルを示す上面図である。
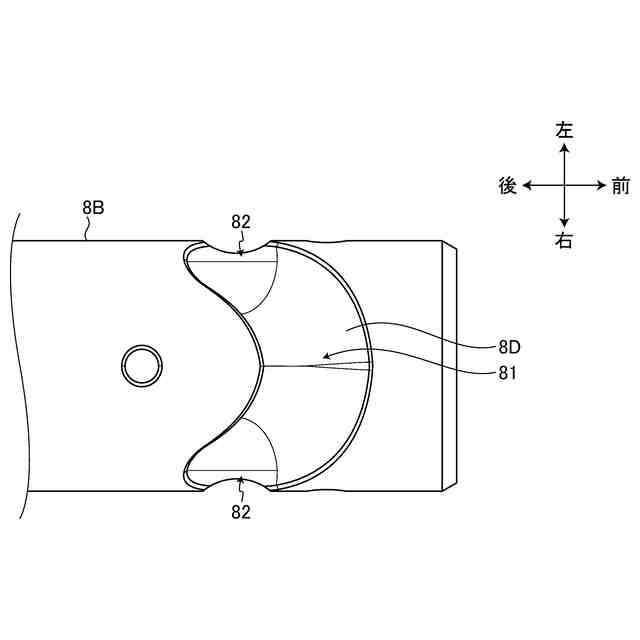
図9は、実施形態に係るスピンドルの一部を示す上面図である。
図10は、実施形態に係るスピンドルの一部を示す斜視図である。
図11は、実施形態に係るスピンドルを示す縦断面図である。
図12は、実施形態に係るスピンドルを示す断面図である。
図13は、実施形態に係るハンマを示す側面図である。
図14は、実施形態に係るハンマを示す縦断面図である。
図15は、実施形態に係るハンマを示す断面図である。
図16は、実施形態に係るスピンドルを示す斜視図である。
図17は、実施形態に係る打撃機構の動作を説明するための断面図である。
図18は、実施形態に係る打撃機構の動作を説明するための断面図である。
図19は、実施形態に係る打撃機構の動作を説明するための断面図である。
図20は、比較例に係るスピンドルの一部を示す上面図である。
図21は、実施例及び比較例のそれぞれに係るスピンドルとボールとの関係を説明するための図である。
図22は、実施例及び比較例のそれぞれに係るボールがスピンドルから受ける力を説明するための図である。
図23は、実施例及び比較例のそれぞれに係る打撃開始トルクを説明するための図である。
図24は、実施例及び比較例のそれぞれに係る締付速度と平均電流と平均電圧とを示す図である。
図25は、実施例及び比較例のそれぞれに係るボールからハンマに荷重が伝わる方向を示す図である。
【発明を実施するための形態】
【0009】
1つ又はそれ以上の実施形態において、インパクト工具は、モータと、モータにより回転されるスピンドルと、スピンドルに形成されるスピンドル溝と、スピンドル溝に保持されるボールと、ボールを介してスピンドルに支持されるハンマと、ハンマを前方に付勢するスプリングと、ハンマにより回転方向に打撃されるアンビルと、を備える。スピンドル溝の深さは、スピンドルの軸方向の位置により異なる。
【0010】
ねじ締め作業においてねじからアンビルに所定値以上の負荷トルクが作用すると、アンビル及びハンマの回転が停止する。スピンドルは、モータにより回転し続けているので、ハンマの回転が停止している状態でスピンドルが回転し続けると、ハンマは、スピンドルに対して後方に移動する。ハンマが後方に移動した後、スプリングの付勢力により、ハンマは回転しながら前方に移動する。ハンマが回転しながら前方に移動することにより、アンビルは、ハンマにより回転方向に打撃される。上記の構成では、スピンドル溝の深さは、スピンドルの軸方向の位置により異なるので、スピンドルとボールとの間に作用する力のうち、回転方向の成分が大きくなる。そのため、ハンマが回転しながら前方に移動するときのハンマの回転速度が高められる。ハンマの回転速度が高められるので、ハンマは、大きい打撃力でアンビルを打撃することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
作業機
14日前
株式会社マキタ
作業機
14日前
株式会社マキタ
管拡径工具
7日前
株式会社マキタ
打ち込み工具
7日前
株式会社マキタ
作業ロボット
15日前
株式会社マキタ
作業ロボット
15日前
株式会社マキタ
インパクト工具
21日前
株式会社マキタ
インパクト工具
21日前
株式会社マキタ
グリース吐出装置
6日前
株式会社マキタ
自律移動システム
15日前
株式会社マキタ
鉄筋結束機およびリール
21日前
株式会社マキタ
グリース吐出装置及びグリース注油システム
6日前
OMC株式会社
ロボット
20日前
株式会社クレスコ
補助吸着具
13日前
株式会社不二越
ロボット
5日前
株式会社エビス
腰ベルト用連結具
20日前
個人
深孔スリーブ駆動ロッド構造
1か月前
工機ホールディングス株式会社
作業機
28日前
個人
バール
1か月前
株式会社イノウ
給油口キャップ用開閉具
6日前
川崎重工業株式会社
制動システム
5日前
株式会社不二越
垂直多関節ロボット
6日前
アイホン株式会社
ネジ締めカウントシステム
7日前
株式会社デンソーウェーブ
ロボット制御システム
26日前
パナソニック株式会社
工具
6日前
パナソニック株式会社
工具
6日前
学校法人法政大学
装着型アシスト装置
1か月前
アピュアン株式会社
エアー式衝撃工具
23日前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社マキタ
打ち込み工具
7日前
株式会社マキタ
インパクト工具
21日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
株式会社マキタ
インパクト工具
21日前
株式会社不二越
ロボットの教示システム及び教示方法
27日前
中国電力株式会社
電動ドライバー
27日前
SB C&S株式会社
治具セット
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ