TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025052831
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2023161766
出願日
2023-09-25
発明の名称
装着型アシスト装置
出願人
学校法人法政大学
代理人
個人
,
個人
,
個人
主分類
B25J
11/00 20060101AFI20250328BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
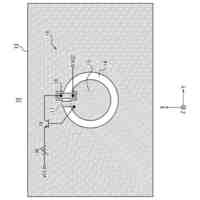
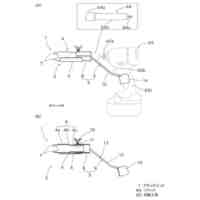
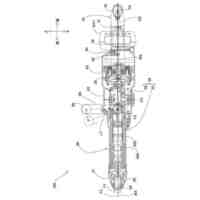
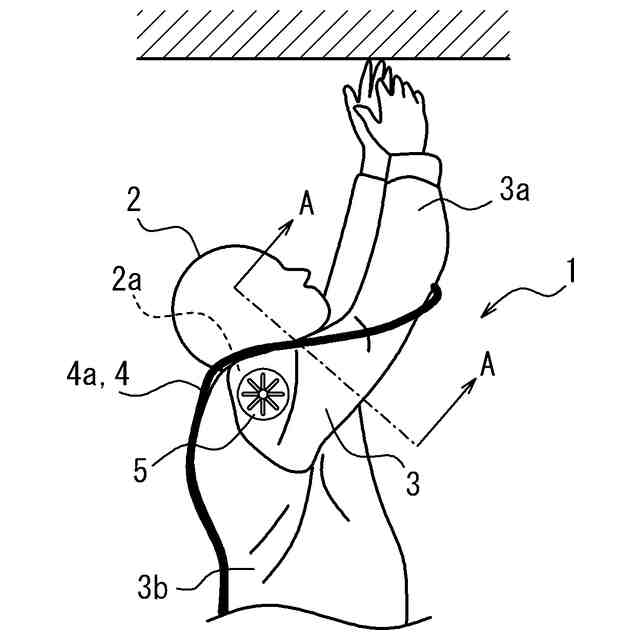
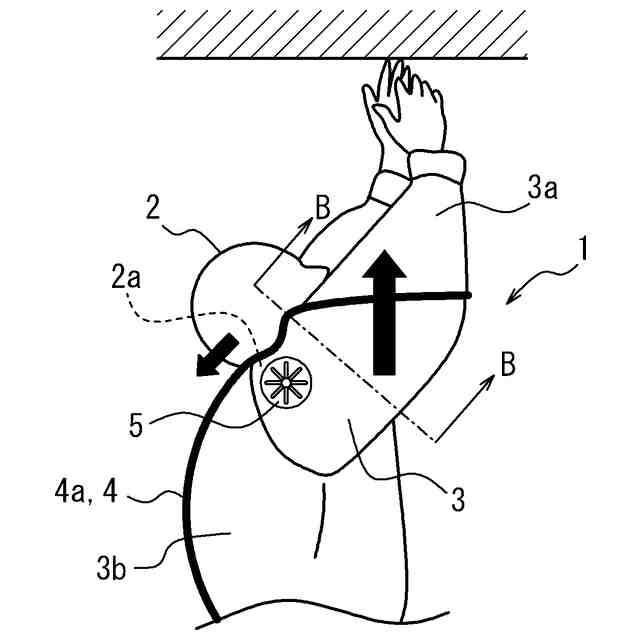
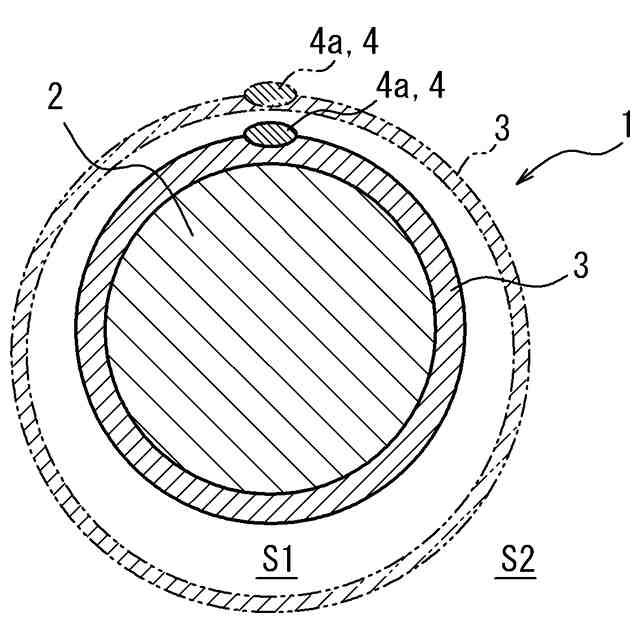
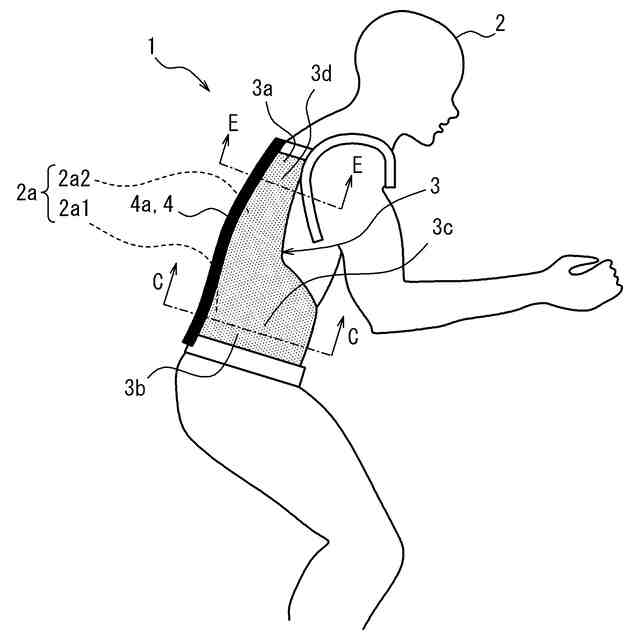
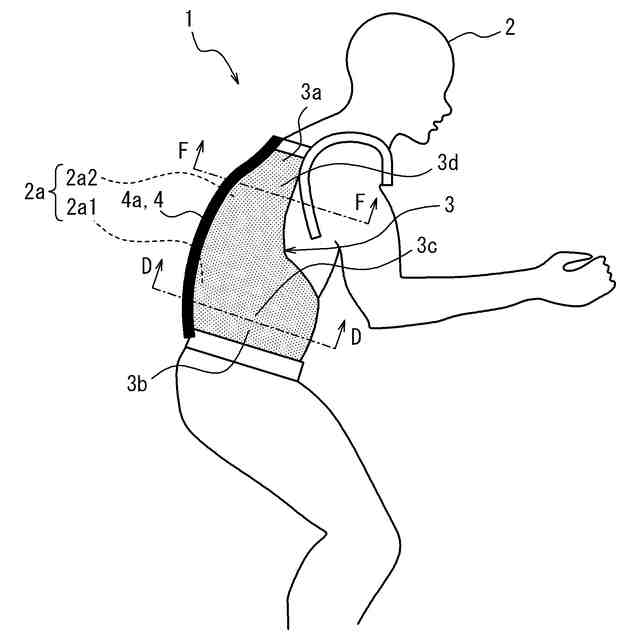
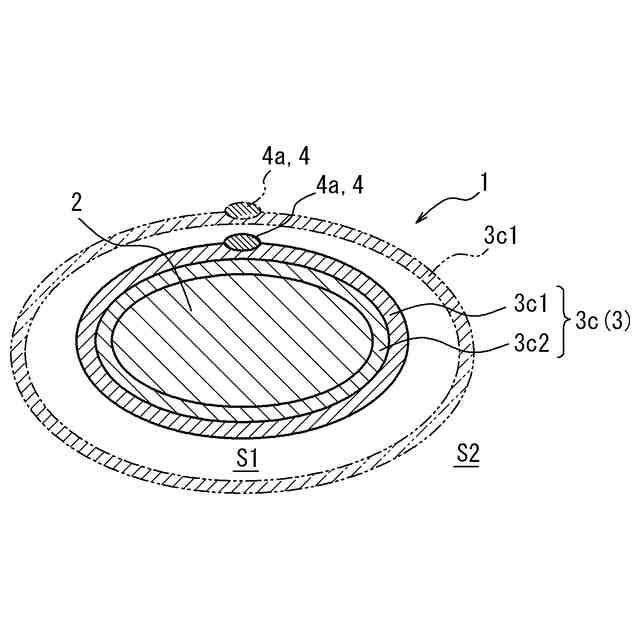
【課題】装着対象の関節を大きな力でアシストでき、しかも関節の可動範囲の制限と重量増大を抑制できる装着型アシスト装置を提供する。
【解決手段】装着型アシスト装置であって、内側空間を形成し装着対象の関節を跨いで覆う膨縮部を有し、前記膨縮部は、前記内側空間に供給される流体の圧力によって膨張し、前記流体の排出によって収縮する、装着型アシスト装置。
【選択図】図1
特許請求の範囲
【請求項1】
装着型アシスト装置であって、
内側空間を形成し装着対象の関節を跨いで覆う膨縮部を有し、
前記膨縮部は、前記内側空間に供給される流体の圧力によって膨張し、前記流体の排出によって収縮する、装着型アシスト装置。
続きを表示(約 610 文字)
【請求項2】
前記膨縮部が膨張した時に緊張することで前記膨縮部の膨張を規制するように前記膨縮部に配置される規制部を有する、請求項1に記載の装着型アシスト装置。
【請求項3】
前記規制部は長尺部を有する、請求項2に記載の装着型アシスト装置。
【請求項4】
前記膨縮部は、前記装着対象の前記関節を跨いだ一方側部分と他方側部分とを有し、
前記長尺部は、前記一方側部分から前記他方側部分に向かう方向へ長尺状に延びる、請求項3に記載の装着型アシスト装置。
【請求項5】
前記長尺部は前記装着対象の前記関節を跨いで配置される、請求項3に記載の装着型アシスト装置。
【請求項6】
前記長尺部は前記膨縮部よりもヤング率が大きい、請求項3に記載の装着型アシスト装置。
【請求項7】
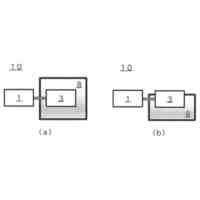
前記装着対象の前記関節は前記内側空間に配置される、請求項1に記載の装着型アシスト装置。
【請求項8】
前記装着対象の前記関節は前記内側空間の隣に配置される、請求項1に記載の装着型アシスト装置。
【請求項9】
前記膨縮部は前記装着対象の前記関節の外周の全部を覆う、請求項8に記載の装着型アシスト装置。
【請求項10】
前記膨縮部は前記装着対象の前記関節の外周の一部のみを覆う、請求項8に記載の装着型アシスト装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は装着型アシスト装置に関する。
続きを表示(約 810 文字)
【背景技術】
【0002】
装着対象の関節を跨ぐ膨縮部を有する装着型アシスト装置が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-78507号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のような装着型アシスト装置は、装着対象の関節を大きな力でアシストでき、しかも関節の可動範囲の制限と重量増大を抑制できることが望ましい。
【0005】
そこで本発明の目的は、装着対象の関節を大きな力でアシストでき、しかも関節の可動範囲の制限と重量増大を抑制できる装着型アシスト装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一態様は以下のとおりである。
【0007】
[1]
装着型アシスト装置であって、
内側空間を形成し装着対象の関節を跨いで覆う膨縮部を有し、
前記膨縮部は、前記内側空間に供給される流体の圧力によって膨張し、前記流体の排出によって収縮する、装着型アシスト装置。
【0008】
[2]
前記膨縮部が膨張した時に緊張することで前記膨縮部の膨張を規制するように前記膨縮部に配置される規制部を有する、[1]に記載の装着型アシスト装置。
【0009】
[3]
前記規制部は長尺部を有する、[2]に記載の装着型アシスト装置。
【0010】
[4]
前記膨縮部は、前記装着対象の前記関節を跨いだ一方側部分と他方側部分とを有し、
前記長尺部は、前記一方側部分から前記他方側部分に向かう方向へ長尺状に延びる、[3]に記載の装着型アシスト装置。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
学校法人法政大学
誘電率測定装置
1か月前
学校法人法政大学
装着型アシスト装置
4か月前
学校法人法政大学
移動体及び無線給電システム
4か月前
学校法人法政大学
金属資源の乾式精錬方法及び乾式精錬装置
2か月前
学校法人法政大学
情報処理装置、情報処理システム、及び情報処理方法
1か月前
学校法人法政大学
情報処理装置、情報処理システム、及び情報処理方法
6か月前
株式会社ダイヘン
受電装置及びワイヤレス給電システム
1か月前
学校法人法政大学
磁化推定装置、磁化推定システム、磁化推定方法、学習モデルの生成方法、及びプログラム
2か月前
北日本海事興業株式会社
水中作業用パワーアシストスーツ駆動装置、およびパワーアシストスーツシステム
5か月前
住友重機械工業株式会社
教示装置
1か月前
川崎重工業株式会社
ロボット
1か月前
トヨタ自動車株式会社
カプラ接続治具
今日
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社マキタ
電気機器
1か月前
積水ハウス株式会社
フィルム除去具
12日前
株式会社不二越
協働ロボットシステム
17日前
株式会社清水製作所
電動工具の吊下げ具
21日前
株式会社不二越
ロボットシステム
6日前
コネクテッドロボティクス株式会社
保持システム
14日前
株式会社マキタ
打撃工具
17日前
タイガー産業株式会社
アタッチメント
4日前
北越メタル株式会社
鉄筋保持具
17日前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
川崎重工業株式会社
作業設備
18日前
株式会社マキタ
打撃工具
21日前
日産自動車株式会社
ロックプレートの圧入治具
1か月前
日本精工株式会社
駆動装置
5日前
コネクテッドロボティクス株式会社
ロボットシステム
14日前
コネクテッドロボティクス株式会社
ロボットシステム
12日前
AMATAMA株式会社
制御装置
1か月前
株式会社永木精機
締結用回動体
1か月前
トヨタ自動車株式会社
ピッキングロボット装置
25日前
倉敷紡績株式会社
線状物供給装置および線状物取上方法
21日前
倉敷紡績株式会社
線状物供給装置および線状物取上方法
21日前
中国電力株式会社
ドライバー
10日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ