TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025113659
公報種別
公開特許公報(A)
公開日
2025-08-04
出願番号
2024007926
出願日
2024-01-23
発明の名称
ロボットシステム
出願人
コネクテッドロボティクス株式会社
代理人
個人
主分類
B25J
13/00 20060101AFI20250728BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】効率よく作業を進めることができるロボットシステムを提供すること。
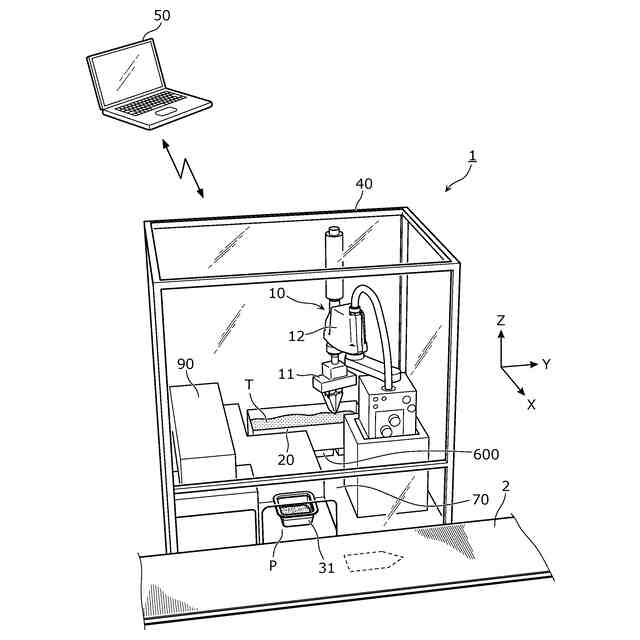
【解決手段】ロボットシステム1は、ロボット10と、対象物Tが収容される収容部材20の下に配置される重量計600とを備える。ロボット10は、対象物Tの保持、及び、保持している対象物Tの解放のうちの少なくとも一方を含む所定の動作を実行する保持部材100であって、上下方向に移動可能な保持部材100を備える。
【選択図】図1
特許請求の範囲
【請求項1】
対象物の保持、及び、保持している対象物の解放のうちの少なくとも一方を含む所定の動作を実行する保持部材を備えるロボットと、
前記対象物が収容される収容部材の下に配置される重量計と、を備え、
前記保持部材は、上下方向に移動可能である、
ロボットシステム。
続きを表示(約 1,000 文字)
【請求項2】
前記対象物は食品である、
請求項1記載のロボットシステム。
【請求項3】
さらに、前記ロボットの動作を制御することで前記保持部材に前記所定の動作を実行させる制御装置を備え、
前記制御装置は、さらに、前記保持部材に付着した前記対象物を落下させるための付着物除去動作であって、前記保持部材の移動を伴う付着物除去動作を実行させる、
請求項1または2記載のロボットシステム。
【請求項4】
前記対象物は、所定の粘性または所定の粘着性を有する、
請求項3記載のロボットシステム。
【請求項5】
さらに、緩衝部材を備え、
前記緩衝部材は、前記重量計の、前記収容部材が置かれる載置面と前記収容部材との間に配置される、
請求項1または2記載のロボットシステム。
【請求項6】
前記緩衝部材は、前記載置面の全面を覆う平板状の部材である、
請求項5記載のロボットシステム。
【請求項7】
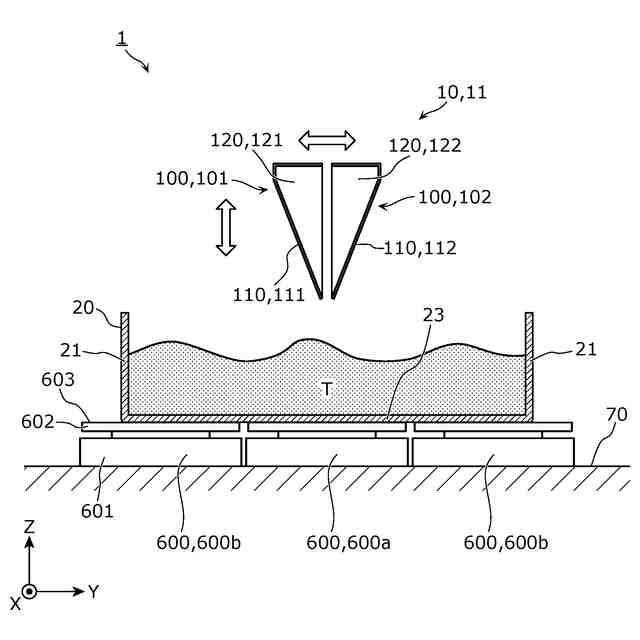
前記収容部材の下には、前記収容部材の底壁に沿って並べられた複数の前記重量計が配置されている、
請求項5記載のロボットシステム。
【請求項8】
前記複数の前記重量計のそれぞれには、前記緩衝部材が配置されている、
請求項7記載のロボットシステム。
【請求項9】
前記複数の前記重量計は、第一重量計と第二重量計とを含み、
複数の前記緩衝部材は、前記第一重量計に配置される第一緩衝部材と、前記第二重量計に配置される第二緩衝部材とを含み、
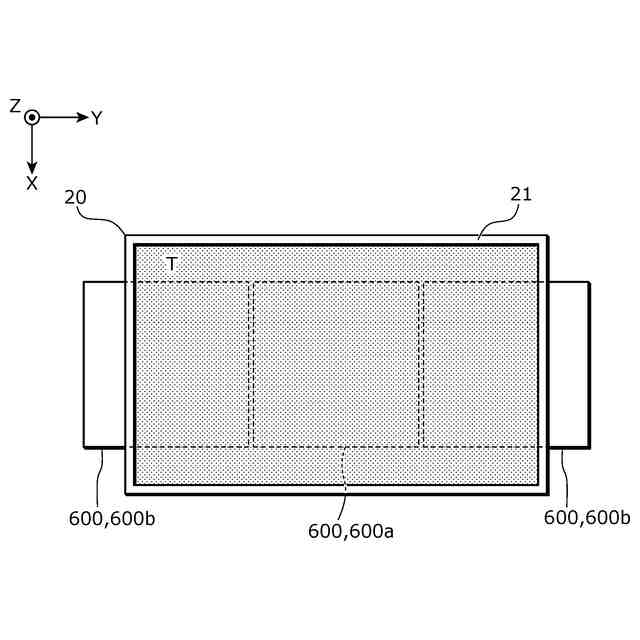
前記第一重量計は、上面視における前記収容部材の中央部に対向し、
前記第二重量計は、上面視における前記収容部材の端部に対向し、
前記第一緩衝部材の剛性は、前記第二緩衝部材の剛性よりも低い、
請求項8記載のロボットシステム。
【請求項10】
前記複数の前記重量計は、第一重量計と第二重量計とを含み、
複数の前記緩衝部材は、前記第一重量計に配置される第一緩衝部材と、前記第二重量計に配置される第二緩衝部材とを含み、
前記第一重量計は、上面視における前記収容部材の中央部に対向し、
前記第二重量計は、上面視における前記収容部材の端部に対向し、
前記第一緩衝部材の剛性は、前記第二緩衝部材の剛性よりも高い、
請求項8記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1は、取り分けシステムを開示している。取り分けシステムは、具材供給部と、多関節ロボットと、制御装置と、を備える。多関節ロボットのハンドを保持する関節には、ハンドが保持した具材の重量を計測する重量センサが設置されている。重量センサによって計測された具材の重量のデータは、制御装置に出力される。
【先行技術文献】
【特許文献】
【0003】
特許第7341550号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来の取り分けシステムでは、例えば、多関節ロボットのハンドが具材(対象物)の保持、移動、または解放等を行う際に飛散した対象物が、関節に配置された重量センサに付着する可能性がある。その結果、付着した対象物が予期せぬ位置及びタイミングで落下する、との問題が生じ、これを処理するための作業が容易ではない可能性がある。このことは、具材の取り分け等の作業を効率よく進めることを阻害する要因となり得る。
【0005】
本発明は、本願発明者が上記課題に新たに着目することによってなされたものであり、効率よく作業を進めることができるロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係るロボットシステムは、対象物の保持、及び、保持している対象物の解放のうちの少なくとも一方を含む所定の動作を実行する保持部材を備えるロボットと、前記対象物が収容される収容部材の下に配置される重量計と、を備え、前記保持部材は、上下方向に移動可能である。
【発明の効果】
【0007】
本発明におけるロボットシステムによれば、効率よく作業を進めることができる。
【図面の簡単な説明】
【0008】
実施の形態に係るロボットシステムの外観を示す斜視図である。
実施の形態に係るロボットのハンドの構成を示す斜視図である。
実施の形態に係るロボットのハンドが有する保持部材の構成を示す斜視図である。
実施の形態に係る複数の重量計の配置レイアウトを模式的に示す正面図である。
実施の形態に係る複数の重量計の配置レイアウトを模式的に示す平面図である。
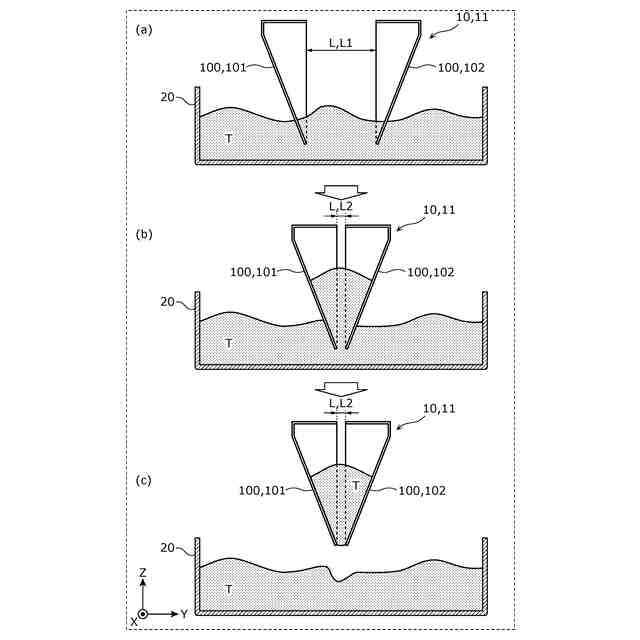
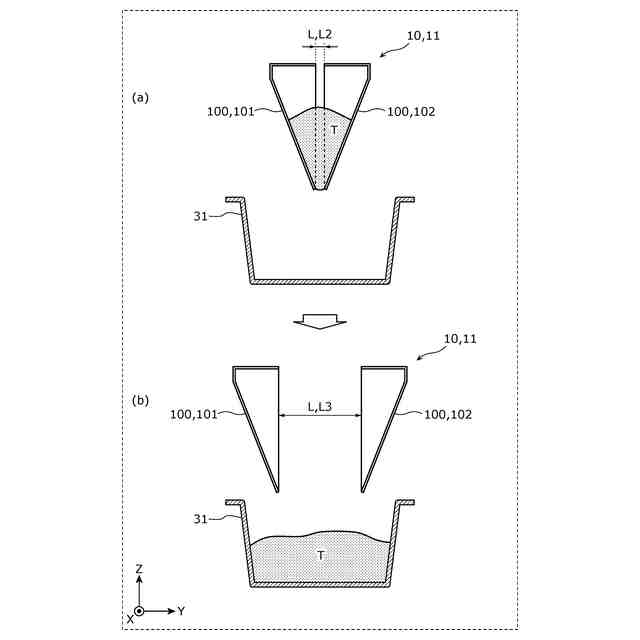
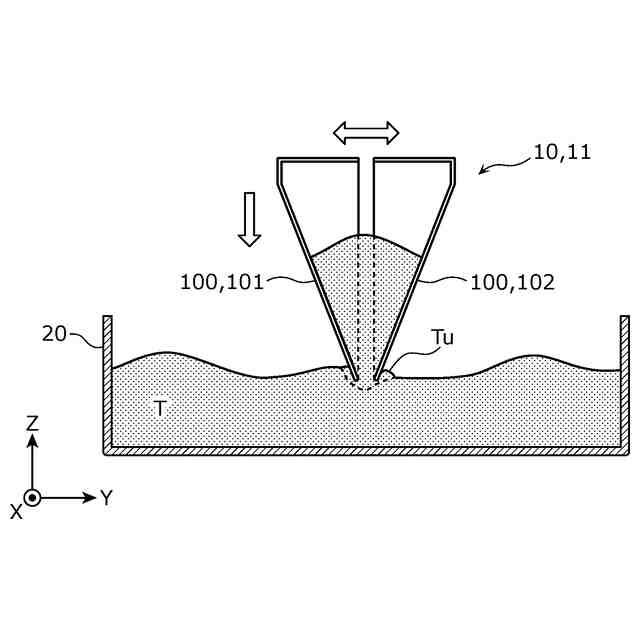
実施の形態に係るハンドが対象物を保持する際の動作例を説明する模式図である。
実施の形態に係るハンドが対象物を解放する際の動作例を説明する模式図である。
実施の形態に係る保持部材の保持動作の直後の状態の一例を模式的に示す図である。
実施の形態に係る付着物除去動作の第1の例を説明する図である。
実施の形態に係る付着物除去動作の第2の例を説明する図である。
実施の形態に係る保持部材の解放動作の直後の状態の一例を模式的に示す図である。
実施の形態に係る付着物除去動作の第3~第5の例を説明する図である。
実施の形態に係る付着物除去動作の第6及び第7の例を説明する図である。
実施の形態の変形例1に係るロボットシステムの第1の構成例を模式的に示す正面図である。
実施の形態の変形例1に係るロボットシステムの第2の構成例を模式的に示す正面図である。
実施の形態の変形例2に係るロボットシステムの構成例を模式的に示す正面図である。
実施の形態の変形例3に係るロボットシステムの構成例を模式的に示す正面図である。
【発明を実施するための形態】
【0009】
本発明の一態様に係るロボットシステムは、対象物の保持、及び、保持している対象物の解放のうちの少なくとも一方を含む所定の動作を実行する保持部材を備えるロボットと、前記対象物が収容される収容部材の下に配置される重量計と、を備え、前記保持部材は、上下方向に移動可能である。
【0010】
この構成によれば、収容部材の下に配置された重量計で、保持部材の所定の動作の前後における収容部材の重量を計測できる。すなわち、例えば、保持部材が保持または解放した対象物の重量を計測できる。従って、仮に、保持部材の所定の動作の際に対象物が飛散した場合であっても、飛散した対象物が、ロボットの一部に配置された重量を検出するための機器(重量センサ等)に付着して予期せぬ位置及びタイミングで落下する、というような事態が生じ難い。従って、本態様に係るロボットシステムによれは、効率よく作業を進めることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る




 特許ウォッチ
特許ウォッチ