TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025049927
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023158443
出願日
2023-09-22
発明の名称
ロボット操作システムの動作方法
出願人
高丸工業株式会社
代理人
個人
,
個人
主分類
B25J
13/00 20060101AFI20250327BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】容易な操作により、ロボットを動作させることができるロボット操作システムの動作方法を提供する。
【解決手段】
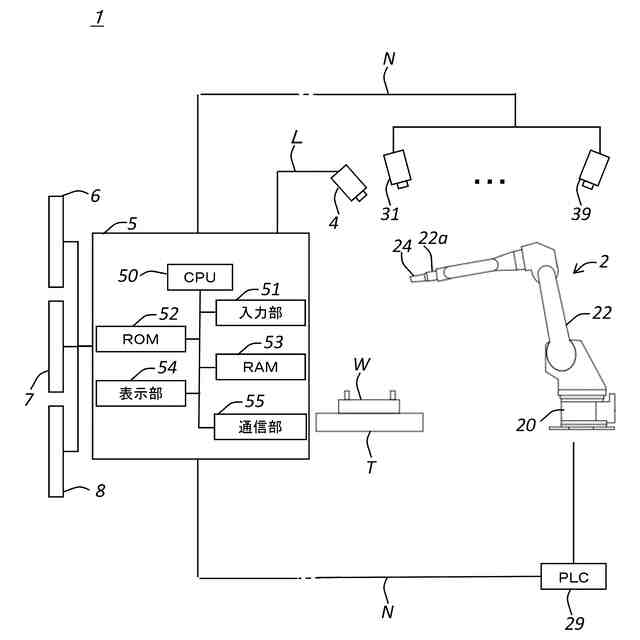
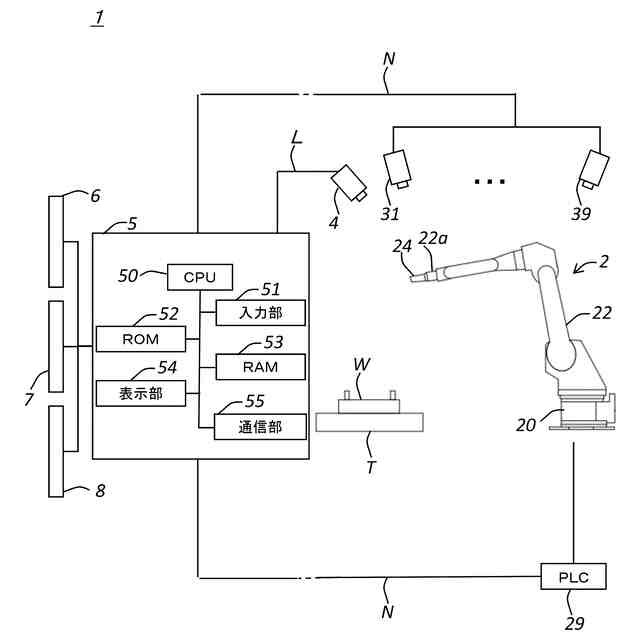
第1表示部7に表示された3次元モデルが所定位置に移動すると、それに応じてロボット2を所定位置に移動させる。
第1表示部7に3次元モデルを表示するにあたっては、第1表示部7に表示させるロボット2の画像が、どの位置から撮像されたものかを決定し、決定した位置から見たロボット2の3次元モデルを生成し、生成したロボット2の3次元モデルをロボット2の画像に重ね合わせて、第1表示部7に表示させる。
【選択図】図2
特許請求の範囲
【請求項1】
ワークに対して所定の加工作業を行うロボットと、
前記ロボットおよび前記ワークを撮像可能な単一の第1カメラと、
前記ロボットの3次元モデルを格納する3次元モデル格納部と、
前記第1カメラが撮像する前記ロボットの画像と3次元モデルとを重ね合わせて表示させる第1表示部と、
前記第1表示部に表示された前記3次元モデルが所定位置に移動すると、それに応じて前記ロボットを所定位置に移動させる制御部と、
を備えたロボット操作システムの動作方法であって、
前記第1表示部に表示させる前記ロボットの画像が、どの位置から撮像されたものかを決定するステップと、
前記決定した位置から見た前記ロボットの3次元モデルを生成するステップと、
前記生成した前記ロボットの3次元モデルを前記ロボットの画像に重ね合わせて、前記第1表示部に表示させるステップと、
を含んでなるロボット操作システムの動作方法。
続きを表示(約 520 文字)
【請求項2】
前記第1カメラは、前記ロボットおよび前記ワークを異なる位置から撮像可能なように固定して配置される複数の第1カメラであって、
前記第1表示部に表示させる前記ロボットの画像は、前記複数の第1カメラから選択された1の第1カメラの画像である、請求項1に記載のロボット操作システムの動作方法。
【請求項3】
さらに、前記ロボット操作システムは、前記第1カメラがどの位置から前記ロボットおよび前記ワークを撮像するかを記憶する第1カメラ位置記憶部を備え、
前記第1表示部に表示させる前記ロボットの画像が、どの位置から撮像されたものかを決定するにあたっては、当該画像を撮像した前記選択された1の第1カメラがどの位置から前記ロボットおよび前記ワークを撮像するかを、第1カメラ位置記憶部から取得する、請求項2に記載のロボット操作システムの動作方法。
【請求項4】
さらに、前記ロボットおよび前記ワークを含む作業現場全体を撮像可能な第2カメラと、
前記第2カメラが撮像する画像をリアルタイムに表示させる第2表示部と、をさらに備えてなる、請求項1に記載のロボット操作システムの動作方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット操作システムの動作方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来から、ワークに対して溶接等の作業を行う産業用ロボットを使用するにあたっては、前準備として、目的地へ移動するための動作をロボットに予め記憶させるティーチングが行われる。
【0003】
ティーチング方法は、一般に、ティーチペンダント(特許文献1の図1参照)を用いたオンラインティーチング方法と、オフラインティーチング方法(特許文献2)という2つの方法が知られている。
【0004】
しかしながら、何れのティーチング方法も、結局は、実際の作業現場での作業が必要となることから危険を伴うという問題があった。
【0005】
そこで、このような問題を解決すべく、特許文献3の発明が提案されている。この特許文献3に記載の発明は、複数の多視点画像撮影カメラにてロボットの作業現場を撮影し、その撮影した画像を合成することで任意視点画像を生成し、その生成した任意視点画像を用いてロボットの作動を指示するというものである。
【先行技術文献】
【特許文献】
【0006】
特開2013-132728号公報
特開平9-179624号公報
特開2011-251395号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記のような発明は、操作自体は容易であるものの、画像を合成するのに非常に時間がかかるばかりか、合成できたとしても画像が不鮮明であることが多く、実用に耐え得るものではなかった。
【0008】
そこで、本発明は、上記の問題に鑑み、短い処理時間で得られる鮮明な画像を見ながら、容易な操作により、ロボットを動作させることができるロボット操作システムの動作方法を提供することを目的としている。
【課題を解決するための手段】
【0009】
上記本発明の目的は、以下の手段によって達成される。なお、括弧内は、後述する実施形態の参照符号を付したものであるが、本発明はこれに限定されるものではない。
【0010】
請求項1に記載のロボット操作システムの動作方法は、
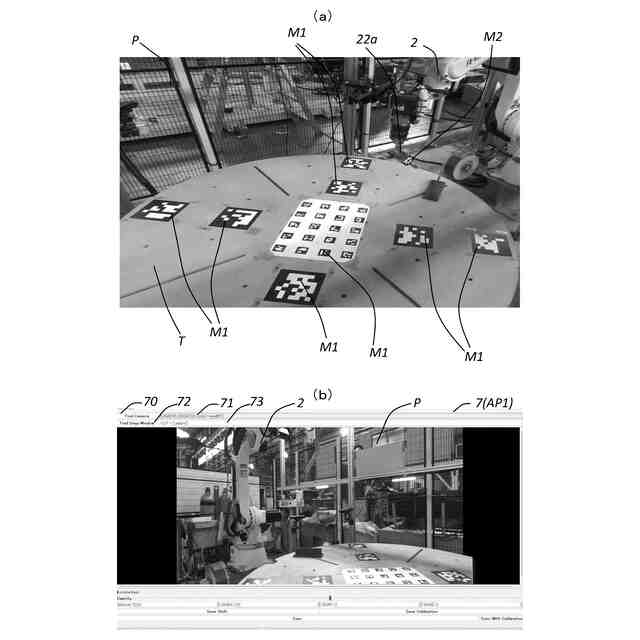
ワーク(例えば図2に示すワークW)に対して所定の加工作業を行うロボット(例えば図2に示すロボット2)と、
前記ロボット(例えば図2に示すロボット2)および前記ワーク(例えば図2に示すワークW)を撮像可能な単一の第1カメラ(例えば図1に示す第1カメラ34)と、
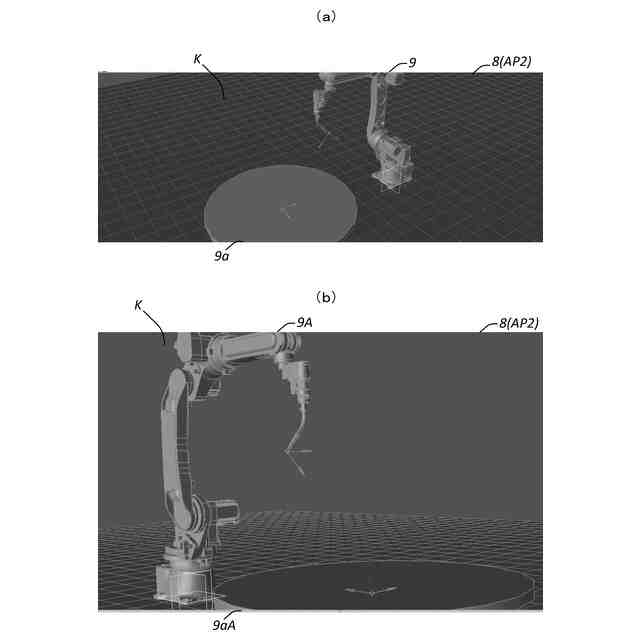
前記ロボット(例えば図2に示すロボット2)の3次元モデル(例えば図5(a)に示す3次元モデル9、図5(b)に示す3次元モデル9A)を格納する3次元モデル格納部(例えば図2に示すROM52)と、
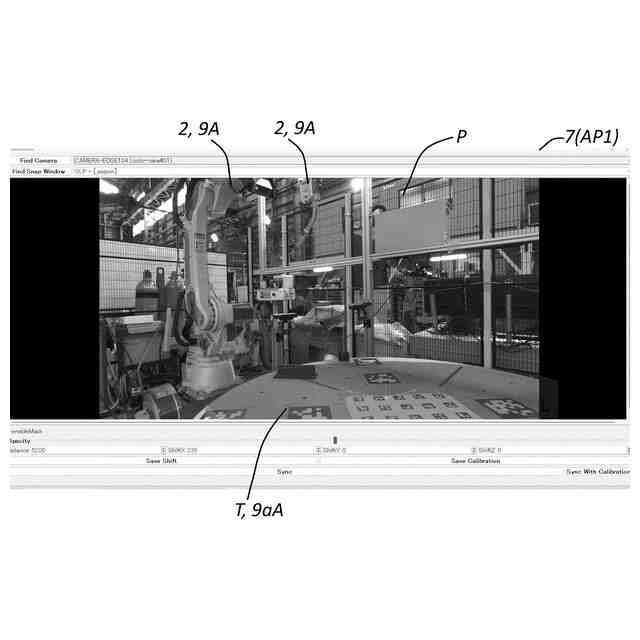
前記第1カメラ(例えば図1に示す第1カメラ34)が撮像する前記ロボット(例えば図2に示すロボット2)の画像(例えば図4(b)に示す作業現場の画像P)と3次元モデル(例えば図5(a)に示す3次元モデル9、図5(b)に示す3次元モデル9A)とを重ね合わせて表示させる第1表示部(例えば図2に示す第1表示部7)と、
前記第1表示部(例えば図2に示す第1表示部7)に表示された前記3次元モデル(例えば図5(a)に示す3次元モデル9、図5(b)に示す3次元モデル9A)が所定位置に移動すると、それに応じて前記ロボット(例えば図2に示すロボット2)を所定位置に移動させる制御部と、
を備えたロボット操作システムの動作方法であって、
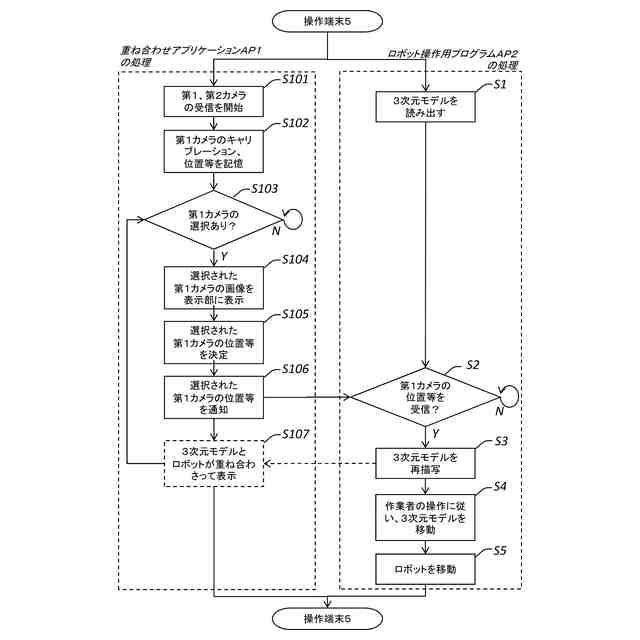
前記第1表示部(例えば図2に示す第1表示部7)に表示させる前記ロボット(例えば図2に示すロボット2)の画像(例えば図4(b)に示す第1カメラ34が撮像する作業現場の画像P)が、どの位置から撮像されたものかを決定するステップ(例えば図3に示すステップS105)と、
前記決定した位置から見た前記ロボット(例えば図2に示すロボット2)の3次元モデル(例えば図5(b)に示す第1カメラ34から見たロボット2の3次元モデル9A)を生成するステップ(例えば図3に示すステップS3)と、
前記生成した前記ロボット(例えば図2に示すロボット2)の3次元モデル(例えば図5(b)に示す第1カメラ34から見たロボット2の3次元モデル9A)を前記ロボット(例えば図2に示すロボット2)の画像(例えば図4(b)に示す第1カメラ34が撮像する作業現場の画像P)に重ね合わせて、前記第1表示部(例えば図2に示す第1表示部7)に表示させる(例えば図6に示す第1表示部7)ステップ(例えば図3に示すステップS107)と、
を含んでなることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
27日前
株式会社不二越
ロボット
19日前
株式会社不二越
ロボット操作装置
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
2日前
川崎重工業株式会社
ロボット
1か月前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社デンソー
操縦桿
1か月前
庄内機械株式会社
釘打装置
6日前
川崎重工業株式会社
制動システム
19日前
株式会社アイエイアイ
グリッパー
8日前
住友重機械工業株式会社
ロボット
13日前
株式会社イノウ
給油口キャップ用開閉具
20日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
オークラ輸送機株式会社
ハンド装置
1日前
ARMA株式会社
UI付エンドエフェクタ
1か月前
株式会社不二越
垂直多関節ロボット
20日前
芝浦機械株式会社
双腕ロボット
12日前
トヨタ自動車東日本株式会社
搬送治具
6日前
アイホン株式会社
ネジ締めカウントシステム
21日前
トヨタ自動車株式会社
荷姿影響緩和方法
9日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
20日前
パナソニック株式会社
工具
20日前
アピュアン株式会社
エアー式衝撃工具
1か月前
個人
回転移動式工具ホルダ
今日
株式会社マキタ
作業機
1か月前
住友重機械工業株式会社
ロボット及びカバー
13日前
株式会社マキタ
電動工具
6日前
学校法人法政大学
装着型アシスト装置
1か月前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社ダイヘン
端末装置
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ