TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025044307
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023146578
出願日
2023-09-09
発明の名称
人協働ロボットシステム
出願人
梅馨堂合同会社
代理人
個人
主分類
B25J
5/02 20060101AFI20250326BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】人とロボットとの協働による自動化を促進し、更なる作業時間と作業効率や精度を高め、省スペース化を実現する人協働ロボットシステムを提供する。
【解決手段】ロボットと、走行可能な支持台と、センサと、第1の実験台と第2の実験台からなる人協働ロボットシステムであって、前記第1の実験台と前記第2の実験台に走行レールを設け、前記支持台の一方端は第1の実験台に設けた走行レールに摺動可能な状態で結合し、前記支持台の他方端は第2の実験台に設けた走行レールに摺動可能な状態で嵌合し、当該支持台の上面に前記ロボットを載置し、前記支持台に前記センサを設け、前記センサはロボットの作業範囲に人が侵入したことを検知することを特徴とする人協働ロボットシステム。
【選択図】図16
特許請求の範囲
【請求項1】
ロボットと、走行可能な支持台と、センサと、第1の実験台と第2の実験台からなる人協働ロボットシステムであって、
前記第1の実験台と前記第2の実験台に走行レールを設け、
前記支持台の一方端は第1の実験台に設けた走行レールに摺動可能な状態で結合し、
前記支持台の他方端は第2の実験台に設けた走行レールに摺動可能な状態で嵌合し、
当該支持台の上面に前記ロボットを載置し、
前記支持台に前記センサを設け、
前記センサはロボットの作業範囲に人が侵入したことを検知することを特徴とする人協働ロボットシステム。
続きを表示(約 1,500 文字)
【請求項2】
前記センサは当該センサを中心とする小さい略扇形状の防護領域と、当該センサを中心とする大きい略扇形状の警告領域の2つのセンサ検知範囲を有することを特徴とする請求項1に記載の人協働ロボットシステム。
【請求項3】
前記第1の実験台の天板の下部中央から支柱板を当該実験台の長手方向を支える状態で設け、
当該支柱板に前記走行レール2本を平行となる様に上下に配置し、
当該走行レールと前記支持台の一方端を摺動可能な状態で結合することを特徴とする請求項1又は2に記載の人協働ロボットシステム。
【請求項4】
前記第2の実験台の天板の下部中央から支柱板を当該実験台の長手方向を支える状態で設け、
当該支柱板に前記走行レール少なくとも1本を前記第1の実験台に設けた走行レールと平行となる様に配置し、
当該走行レールと前記支持台の他方端を摺動可能な状態で嵌合することを特徴とする請求項3に記載の人協働ロボットシステム。
【請求項5】
前記支持台に駆動装置を設け、
当該駆動装置にピニオンを結合し、前記第1の実験台に設けた走行レールの2本の間にラックを支柱板に設置し、
前記ピニオンと前記ラックを摺動可能な状態で配置することを特徴とする請求項1又は2に記載の人協働ロボットシステム。
【請求項6】
前記ロボット及び前記駆動装置に接続されるケーブル類を保持するケーブルキャリアを前記第1の実験台に設け、
前記上部の走行レールの設置位置としては、前記ケーブルキャリアの可動部端が、前記支持台の下部側に固定できる高さで設置することを特徴とする請求項5に記載の人協働ロボットシステム。
【請求項7】
前記第2の実験台に設けた走行レールに摺動可能な状態で支持台受台を結合し、
当該支持台受台の上面に支持台受台側嵌合部を設け、
前記支持台の他方端の下面に支持台側嵌合部を設け、
当該嵌合凹部に当該嵌合凸部を嵌め合わせることにより前記支持台と前記支持台受台を嵌合することを特徴とする請求項1又は2に記載の人協働ロボットシステム。
【請求項8】
前記支持台側嵌合部又は前記支持台受台側嵌合部のいずれか一方に凸部を設け、
当該支持台側嵌合部又は支持台受台側嵌合部の他方に凹部を設け、
当該凹部に当該凸部を嵌合することにより前記支持台と前記持台受台側嵌合部を嵌合することを特徴とする請求項7に記載の人協働ロボットシステム。
【請求項9】
制御装置により、
前記センサのセンサ検知範囲のうちロボットの作業範囲に被検知物の反応があるかを検知し、反応が無い場合は前記支持台と前記ロボットを通常運転させ、
前記センサのセンサ検知範囲のうちロボットの作業範囲で人の侵入を検知した場合は、前記支持台と前記ロボットを減速運転又は停止させる制御を行うことを特徴とする請求項1に記載の人協働ロボットシステム。
【請求項10】
制御装置により、
前記センサのセンサ検知範囲のうち防護領域及び警告領域に被検知物の反応があるかを検知し、いずれの領域にも反応が無い場合は前記支持台と前記ロボットを通常運転させ、
前記センサのセンサ検知範囲のうち防護領域内に反応がなく、警告領域内で人の侵入を検知した場合は、支持台とロボットを減速運転させ、
前記センサのセンサ検知範囲のうち防護領域内で人の侵入を検知した場合は、支持台とロボットを停止させる制御を行うことを特徴とする請求項2に記載の人協働ロボットシステム。
発明の詳細な説明
【背景技術】
【0001】
本発明の開示の実施形態は、人協働ロボットシステムに関する。
続きを表示(約 4,200 文字)
【0002】
ロボットと作業者とが協働して作業する場合、一般的には作業者の安全を確保するためには、光カーテンを用いたり物理的に構成された安全柵を用いたりして、ロボットと作業者との作業範囲を分割する対応を実施していた。しかしながら、近年は作業効率向上のため、ロボットと作業者が近接範囲で協働して作業することが主流になりつつあり、この場合は作業者の安全確保が重要視されることになる。その対応としては、一般的にはロボット自体に近接センサを設けて、作業者の接近を検知する方式が考案されている。
【0003】
例えば、特許文献1には、ロボット昇降装置を走行台車上に設け、且つ、双腕ロボットを組立作業台に鉛直方向の回転中心軸廻りに回転可能に支持することによって、双腕ロボットを軽快に移動させることができ、作業効率の向上を図ることができる技術が開示されている。(特許文献1参照)
【0004】
また、特許文献2には、人間・ロボット協働型のライン生産方式に利用することが可能で、製品の生産工場において移動しながら作業を行うことが可能な自走式関節ロボットが開示されている。(特許文献2参照)
【先行技術文献】
【特許文献】
【0005】
特開2018―15885号公報
再公表2016/103303号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1や特許文献2等で開示されている従来技術では、作業効率は良くなるものの、足元の走行台車が邪魔で人が作業台にアクセスしにくいといった課題がある。また、従来技術で開示されるような走行台車は人と協働することを想定されていないため安全が確保できないといった課題がある。さらに、台車の移動速度が遅かったり、位置決め精度が低かったりすることにより作業効率が悪いといった課題もある。
【0007】
本発明はこのような問題点に鑑みてなされたものであり、人とロボットとの協働による自動化を促進し、更なる作業時間と作業効率や精度を高め、省スペース化を実現する人協働ロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、以下の(1)から(10)に関する。
(1)ロボットと、走行可能な支持台と、センサと、第1の実験台と第2の実験台からなる人協働ロボットシステムであって、前記第1の実験台と前記第2の実験台に走行レールを設け、前記支持台の一方端は第1の実験台に設けた走行レールに摺動可能な状態で結合し、前記支持台の他方端は第2の実験台に設けた走行レールに摺動可能な状態で嵌合し、当該支持台の上面に前記ロボットを載置し、前記支持台に前記センサを設け、前記センサはロボットの作業範囲に人が侵入したことを検知することを特徴とする人協働ロボットシステム。
(2)前記センサは当該センサを中心とする小さい略扇形状の防護領域と、当該センサを中心とする大きい略扇形状の警告領域の2つのセンサ検知範囲を有することを特徴とする前記(1)に記載の人協働ロボットシステム。
(3)前記第1の実験台の天板の下部中央から支柱板を当該実験台の長手方向を支える状態で設け、当該支柱板に前記走行レール2本を平行となる様に上下に配置し、当該走行レールと前記支持台の一方端を摺動可能な状態で結合することを特徴とする前記(1)又は(2)に記載の人協働ロボットシステム。
(4)前記第2の実験台の天板の下部中央から支柱板を当該実験台の長手方向を支える状態で設け、当該支柱板に前記走行レール少なくとも1本を前記第1の実験台に設けた走行レールと平行となる様に配置し、当該走行レールと前記支持台の他方端を摺動可能な状態で嵌合することを特徴とする前記(3)に記載の人協働ロボットシステム。
(5)前記支持台に駆動装置を設け、当該駆動装置にピニオンを結合し、前記第1の実験台に設けた走行レールの2本の間にラックを支柱板に設置し、前記ピニオンと前記ラックを摺動可能な状態で配置することを特徴とする前記(1)は(2)に記載の人協働ロボットシステム。
(6)前記ロボット及び前記駆動装置に接続されるケーブル類を保持するケーブルキャリアを前記第1の実験台に設け、前記上部の走行レールの設置位置としては、前記ケーブルキャリアの可動部端が、前記支持台の下部側に固定できる高さで設置することを特徴とする前記(5)に記載の人協働ロボットシステム。
(7)前記第2の実験台に設けた走行レールに摺動可能な状態で支持台受台を結合し、当該支持台受台の上面に支持台受台側嵌合部を設け、前記支持台の他方端の下面に支持台側嵌合部を設け、当該嵌合凹部に当該嵌合凸部を嵌め合わせることにより前記支持台と前記支持台受台を嵌合することを特徴とする前記(1)又は(2)に記載の人協働ロボットシステム。
(8)前記支持台側嵌合部又は前記支持台受台側嵌合部のいずれか一方に凸部を設け、当該支持台側嵌合部又は支持台受台側嵌合部の他方に凹部を設け、当該凹部に当該凸部を嵌合することにより前記支持台と前記持台受台側嵌合部を嵌合することを特徴とする前記(7)に記載の人協働ロボットシステム。
(9)制御装置により、前記センサのセンサ検知範囲のうちロボットの作業範囲に被検知物の反応があるかを検知し、反応が無い場合は前記支持台と前記ロボットを通常運転させ、前記センサのセンサ検知範囲のうちロボットの作業範囲で人の侵入を検知した場合は、前記支持台と前記ロボットを減速運転又は停止させる制御を行うことを特徴とする前記(1)に記載の人協働ロボットシステム。
(10)制御装置により、前記センサのセンサ検知範囲のうち防護領域及び警告領域に被検知物の反応があるかを検知し、いずれの領域にも反応が無い場合は前記支持台と前記ロボットを通常運転させ、前記センサのセンサ検知範囲のうち防護領域内に反応がなく、警告領域内で人の侵入を検知した場合は、支持台とロボットを減速運転させ、前記センサのセンサ検知範囲のうち防護領域内で人の侵入を検知した場合は、支持台とロボットを停止させる制御を行うことを特徴とする前記(2)に記載の人協働ロボットシステム。
【発明の効果】
【0009】
本発明の人協働ロボットシステム等によれば、人とロボットとの協働による自動化を促
進し、更なる作業時間と作業効率や精度を高め、省スペース化を実現できる。
【図面の簡単な説明】
【0010】
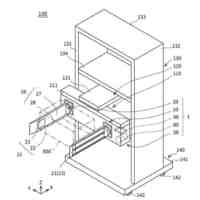
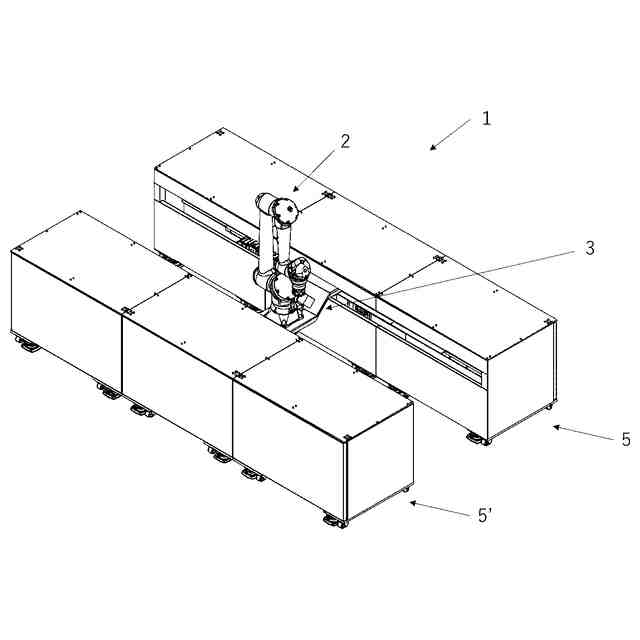
本実施形態に係る人協働ロボットシステムの全体概略の一例を表す図である。
本実施形態に係る人協働ロボットシステムを上面から表す図である。
本実施形態に係る人協働ロボットシステムを正面から表す図である。
本実施形態に係る人協働ロボットシステムを右側面から表す図である。
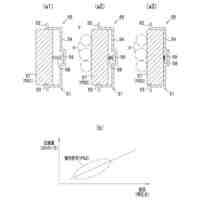
図3に記載の本実施形態に係る人協働ロボットシステムのA-A断面図である。
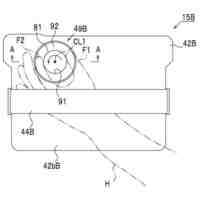
本実施形態に係る人協働ロボットシステムのセンサ検知範囲の概要を表す図である。
本実施形態に係る人協働ロボットシステムのセンサ検知範囲を上面から表す図である。
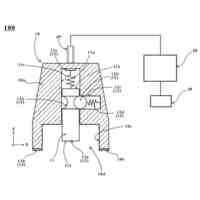
本実施形態に係る人協働ロボットシステムの実験台のカバー部を取り外した状態を表す概要図である。
本実施形態に係る人協働ロボットシステムの実験台のカバー部を取り外した状態の正面図である。
本実施形態に係る人協働ロボットシステムの支持台と実験台の取り付け状態を示す図である。
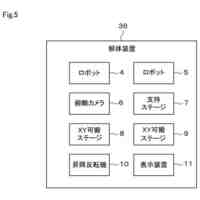
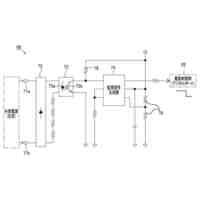
本実施形態に係る人協働ロボットシステムの制御装置を示すブロック図である。
本実施形態に係る人協働ロボットシステムのセンサで検知した際の支持台及びロボットの制御過程を示すフローチャートである。
本実施形態に係る人協働ロボットシステムのセンサ検知範囲を示す図である。
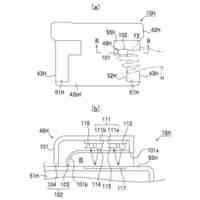
本実施形態に係るケーブルキャリア支部の取り付け状態を示す図である。
本実施形態に係る人協働ロボットシステムにおいて支持台が実験台5の左右に移動した状態を示す図である。
第2の実施形態に係る人協働ロボットシステムの全体概略の一例を表す図である。
第2の実施形態に係る人協働ロボットシステムを上面から表す図である。
第2の実施形態に係る人協働ロボットシステムを正面から表す図である。
第2の実施形態に係る人協働ロボットシステムを右側面から表す図である。
図18に記載の第2の実施形態に係る人協働ロボットシステムのA-A断面図である。
第2の実施形態に係る人協働ロボットシステムを上面及び図中に示すB-B断面図である。
第2の実施形態に係る人協働ロボットシステムを上面及び図中に示すC-C断面図である。
図22のC-C断面図において第2の実験台のカバー部を外した状態を示す図である。
第2の実施形態に係る人協働ロボットシステムのセンサ検知範囲の概要を表す図である。
第2の実施形態に係る人協働ロボットシステムのセンサ検知範囲を上面から表す図である。
第2の実施形態に係る人協働ロボットシステムの実験台のカバー部を取り外した状態を表す概要図である(第1の実験台側)。
第2の実施形態に係る人協働ロボットシステムの実験台のカバー部を取り外した状態を表す概要図である(第2の実験台側)。
第2の実施形態に係る人協働ロボットシステムにおいて支持台が実験台の右側に移動した状態を示す図である。
第2の実施形態に係る人協働ロボットシステムにおいて支持台が実験台の左側に移動した状態を示す図である。
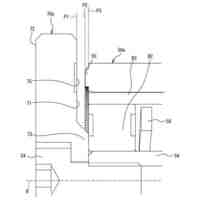
第2の実験台に設けた走行レールと支持台との嵌合状態を示す図である。
第2の実験台に設けた走行レールと支持台との嵌合状態を説明する断面図である。
第2の実施形態に係る人協働ロボットシステムのセンサ検知範囲を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
梅馨堂合同会社
人協働ロボットシステム
24日前
OMC株式会社
ロボット
9日前
株式会社クレスコ
補助吸着具
2日前
株式会社エビス
腰ベルト用連結具
9日前
個人
深孔スリーブ駆動ロッド構造
22日前
株式会社不二越
ロボット操作装置
29日前
川崎重工業株式会社
ロボット
1か月前
株式会社デンソー
操縦桿
1か月前
個人
バール
22日前
工機ホールディングス株式会社
作業機
17日前
梅馨堂合同会社
人協働ロボットシステム
24日前
ARMA株式会社
UI付エンドエフェクタ
25日前
株式会社デンソーウェーブ
ロボット制御システム
15日前
アピュアン株式会社
エアー式衝撃工具
12日前
株式会社マキタ
作業機
29日前
学校法人法政大学
装着型アシスト装置
19日前
三菱電機株式会社
トルク締め個所検出システム
22日前
株式会社マキタ
インパクト工具
10日前
株式会社マキタ
インパクト工具
10日前
高丸工業株式会社
ロボット操作システムの動作方法
22日前
シブヤパッケージングシステム株式会社
物品移載装置
1か月前
株式会社不二越
ロボットの教示システム及び教示方法
16日前
SB C&S株式会社
治具セット
9日前
中国電力株式会社
電動ドライバー
16日前
オムロン株式会社
モバイルロボット
16日前
オムロン株式会社
モバイルロボット
16日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
12日前
JUKI株式会社
ハンドリング装置
24日前
株式会社デンソー
解体装置および解体プログラム
1か月前
株式会社デンソー
作業装置および作業プログラム
1か月前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
16日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
16日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
16日前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
16日前
シナノケンシ株式会社
把持装置
16日前
株式会社SUBARU
ボルトの電動締結工具
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ