TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025062494
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171617
出願日
2023-10-02
発明の名称
ハンド装置及びハンド装置の制御方法
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20250407BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】利便性の高いハンド装置が求められている。
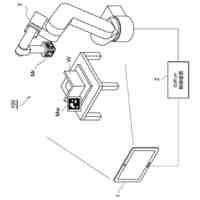
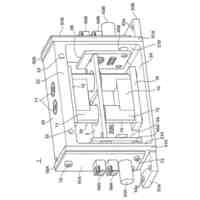
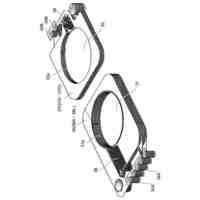
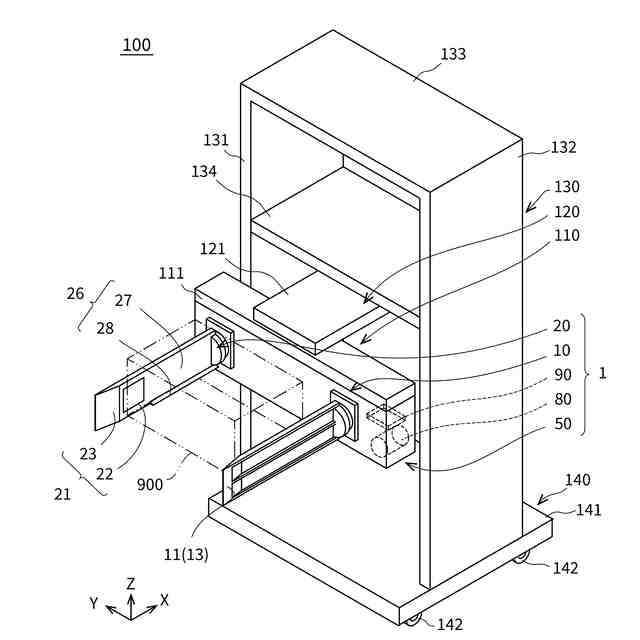
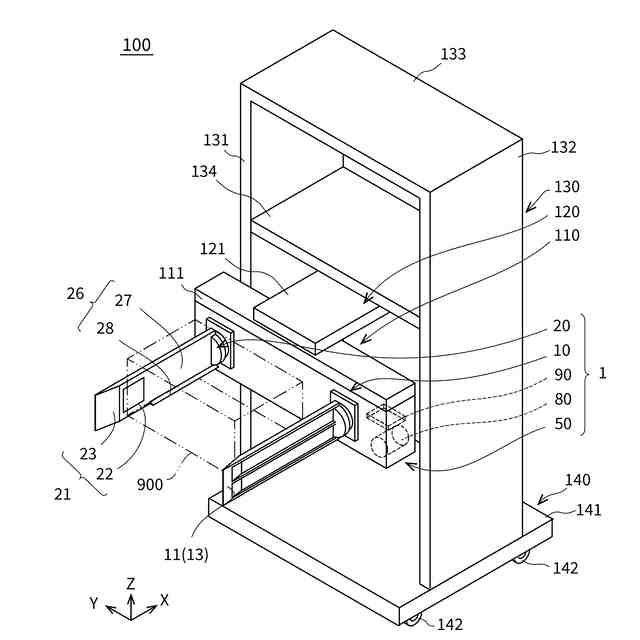
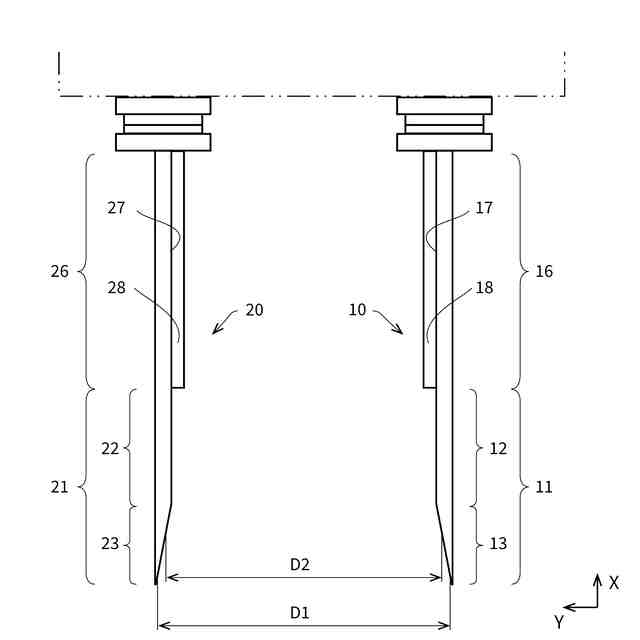
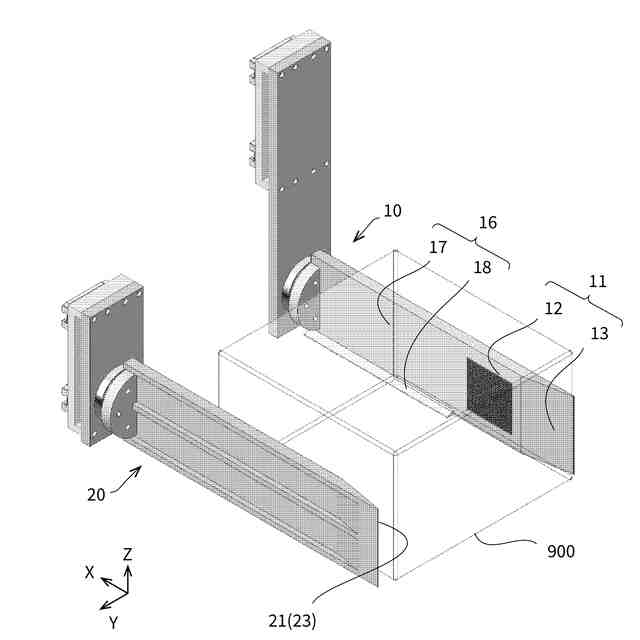
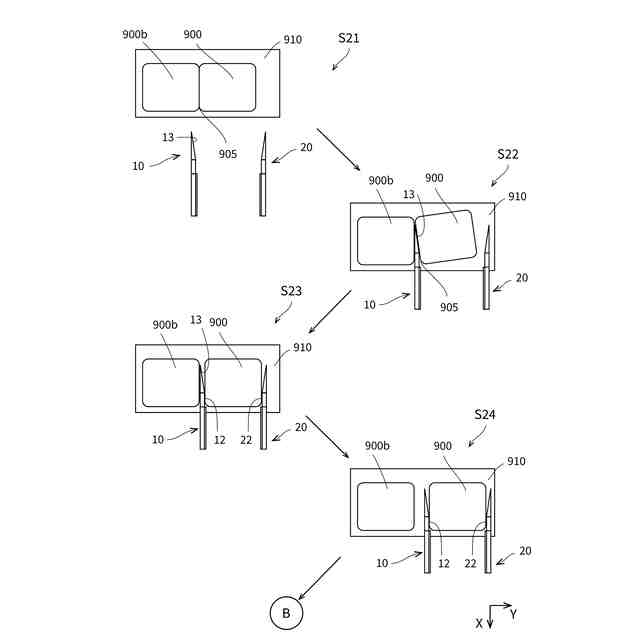
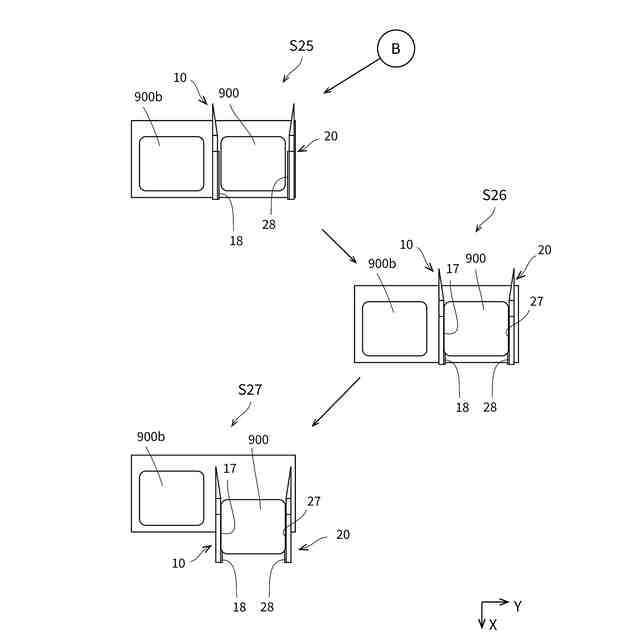
【解決手段】ハンド装置1は、それぞれ前後方向が長手方向となるように構成されており、前後方向に直交する左右方向において対象物900を間に挟んで並ぶように配置可能な第一ハンド10及び第二ハンド20を備える。第一ハンド10は、前端部に位置しており、対象物900の側面と側面に対向する他の部材の面との間に差込むための差込部11と、差込部11よりも後方に設けられており、対象物900を挟持するための把持部とを有する。ハンド装置1は、把持部が対象物900の側面に接触した状態で第一ハンド10が第二ハンド20に相対的に近づくことによって対象物900を把持部と第二ハンド20との間で挟持することができるように構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
対象物を挟持可能なハンド装置であって、
それぞれ前後方向が長手方向となるように構成されており、前後方向に直交する左右方向において前記対象物を間に挟んで並ぶように配置可能な第一ハンド及び第二ハンドを備え、
前記第一ハンドは、
前端部に位置しており、前記対象物の側面と当該側面に対向する他の部材の面との間に差込むための差込部と、
前記差込部よりも後方に設けられており、前記対象物を挟持するための把持部とを有し、
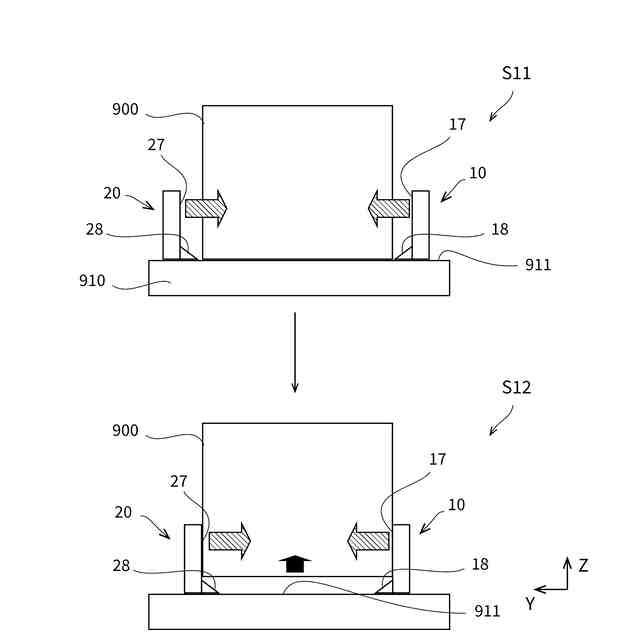
前記把持部が前記対象物の側面に接触した状態で前記第一ハンドが前記第二ハンドに相対的に近づくように前記第一ハンド及び第二ハンドの少なくとも一方の位置が変化することによって前記対象物を前記把持部と前記第二ハンドとの間で挟持することができるように構成されている、ハンド装置。
続きを表示(約 940 文字)
【請求項2】
前記差込部は、前端部に近づくにつれて左右方向における厚みが小さくなるように形成された差込テーパ部を有している、請求項1に記載のハンド装置。
【請求項3】
前記差込テーパ部は、左右方向における前記第二ハンドからの距離が、前端部に近づくにつれて大きくなるように形成されている、請求項2に記載のハンド装置。
【請求項4】
前記把持部は、
前記対象物の側面に向く把持面と、
前記把持面の下部から前記第二ハンドがある方向に突出するように前記把持部の下端部に設けられている突出部とを有し、
前記突出部の上面は、前記把持面から離れるに従って低くなるように傾斜しており、
前記対象物が前記把持部と前記第二ハンドとの間で挟持された状態において、前記突出部が前記対象物の下方に位置するように構成されている、請求項1に記載のハンド装置。
【請求項5】
動力源を用いて前記第一ハンド及び前記第二ハンドの少なくとも一方の位置を変更可能に構成されている請求項1に記載のハンド装置の制御方法であって、
前記対象物の側面と当該側面に対向する他の部材の面との間に前記差込部を差し込む差込ステップと、
前記対象物の側面に前記把持部が対向するように前記第一ハンドを配置する配置ステップと、
左右方向において前記第一ハンドから離れている前記対象物の側面に、前記第二ハンドを接触させた状態で、前記第一ハンドが前記第二ハンドに相対的に近づくように前記第一ハンド及び前記第二ハンドの少なくとも一方の位置を変化させ、前記対象物を前記把持部に接触させて前記第一ハンドと前記第二ハンドとで前記対象物を挟持する挟持ステップとを含む、ハンド装置の制御方法。
【請求項6】
前記差込ステップの後で前記差込部を前記対象物の側面に接触させて前記差込部と前記第二ハンドとで前記対象物を把持して前記対象物の位置を変更する仮把持ステップを有し、
前記仮把持ステップの後で、前記差込部と前記第二ハンドとによる前記対象物の把持を解除すると共に前記配置ステップを行う、請求項5に記載のハンド装置の制御方法。
発明の詳細な説明
【技術分野】
【0001】
この発明は、対象物を2つのハンドで挟持可能なハンド装置及びハンド装置の制御方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、例えば製造現場や倉庫等において、対象物を搬送する用途などに用いられるロボットシステムや、製造ライン上の対象物を扱うロボット等の装置がある。この種の装置には、対象物を挟持することができるように構成されたハンド装置が設けられる場合がある。
【0003】
下記特許文献1には、一方の縦アームから他方の縦アームに向かって出没可能な挟持爪を有し、コイルスプリングの付勢力で操作されるハンド装置が記載されている。これにより、部品箱の段積み及び段バラシが容易に行える。
【0004】
下記特許文献2には、物品を挟持するための第一爪部と第二挟持部、及びそれらを接近させる又は離す駆動装置を有し、物品間の隙間に挿入可能なロボットハンドが記載されている。これにより、隣接配置物品の容易な取り出しが可能となる。
【0005】
下記特許文献3には、荷物の上面と側面を吸着し、それらを移動する装置、そしてそれらを制御するプロセッサを有し、荷物の上面及び側面を吸着した状態で、吸着部を上方へ移動させる荷降し装置が記載されている。これにより、荷物の効率的な荷降しが可能になる。
【0006】
下記特許文献4には、並べられた複数の構造体と、それらを回動可能に連結する部材、そして固定と解除を行う部材を有し、これらを通じて構造体の伸縮を行う直動伸縮機構が記載されている。これにより、部品点数の増加を抑え、小型化及び軽量化が可能となる。
【先行技術文献】
【特許文献】
【0007】
特開2012-200806号公報
特開2020-172358号公報
特開2021-066578号公報
特開2017-057929号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
実際のハンド装置が用いられる場面や、今後活用できるようにすることが期待されている場面には、様々なものがある。1つの場面において特に効果的に用いることができる利便性の高いハンド装置や、複数の場面で効果的に用いたりすることができる利便性の高いハンド装置などが求められている。
【0009】
この発明は、利便性が高いハンド装置及びハンド装置の制御方法を提供することを目的としている。
【課題を解決するための手段】
【0010】
本第一の発明のハンド装置は、対象物を挟持可能なハンド装置であって、それぞれ前後方向が長手方向となるように構成されており、前後方向に直交する左右方向において対象物を間に挟んで並ぶように配置可能な第一ハンド及び第二ハンドを備え、第一ハンドは、前端部に位置しており、対象物の側面と側面に対向する他の部材の面との間に差込むための差込部と、差込部よりも後方に設けられており、対象物を挟持するための把持部とを有し、把持部が対象物の側面に接触した状態で第一ハンドが第二ハンドに相対的に近づくように第一ハンド及び第二ハンドの少なくとも一方の位置が変化することによって対象物を把持部と第二ハンドとの間で挟持することができるように構成されている、ハンド装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
移動体
4日前
株式会社ダイヘン
搬送車
19日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
溶接装置
1か月前
株式会社ダイヘン
端末装置
19日前
株式会社ダイヘン
搬送装置
4日前
株式会社ダイヘン
充電装置
14日前
株式会社ダイヘン
ヒューズ
1日前
株式会社ダイヘン
直流電源回路
1か月前
株式会社ダイヘン
電圧調整装置
14日前
株式会社ダイヘン
電圧調整装置
1か月前
株式会社ダイヘン
溶接ロボット
1日前
株式会社ダイヘン
溶接ロボット
1日前
株式会社ダイヘン
電力システム
1か月前
株式会社ダイヘン
溶接システム
19日前
株式会社ダイヘン
情報処理装置
19日前
株式会社ダイヘン
蓄電池システム
1か月前
株式会社ダイヘン
インバータ装置
1か月前
株式会社ダイヘン
多層盛り溶接方法
1か月前
株式会社ダイヘン
無線給電システム
1か月前
株式会社ダイヘン
絶縁型コンバータ
1か月前
株式会社ダイヘン
プラズマ処理装置
12日前
株式会社ダイヘン
絶縁型コンバータ
1か月前
株式会社ダイヘン
金属材料の分離方法
25日前
株式会社ダイヘン
ロボット制御システム
4日前
株式会社ダイヘン
圧接装置及び圧接方法
1か月前
株式会社ダイヘン
溶接装置及び溶接方法
1か月前
株式会社ダイヘン
トランス用のコイル基板
1か月前
株式会社ダイヘン
非消耗電極アーク溶接方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
13日前
株式会社ダイヘン
移動体、及び誘導線検出装置
4日前
株式会社ダイヘン
移動体、及び誘導線検出装置
4日前
株式会社ダイヘン
移動体、及び誘導線検出装置
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ