TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025082996
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2023196604
出願日
2023-11-20
発明の名称
搬送装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20250523BHJP(基本的電気素子)
要約
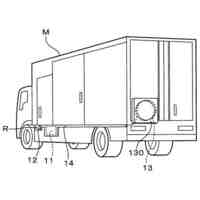
【課題】真空環境下にセンサや信号線を配することなくハンド上のワークの存否を検知することができる搬送装置を提供する。
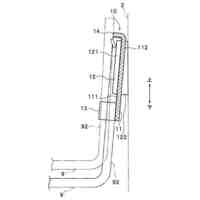
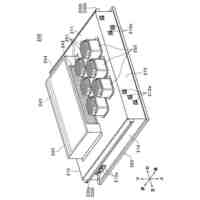
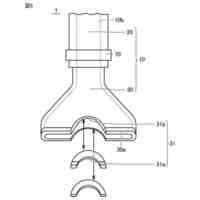
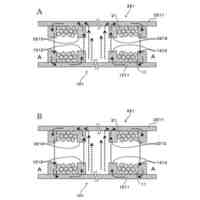
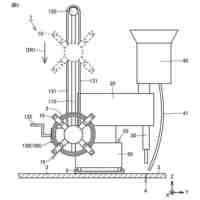
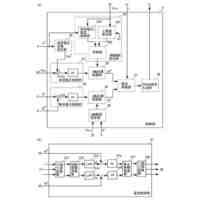
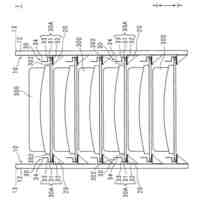
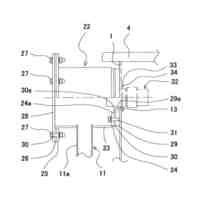
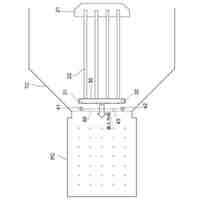
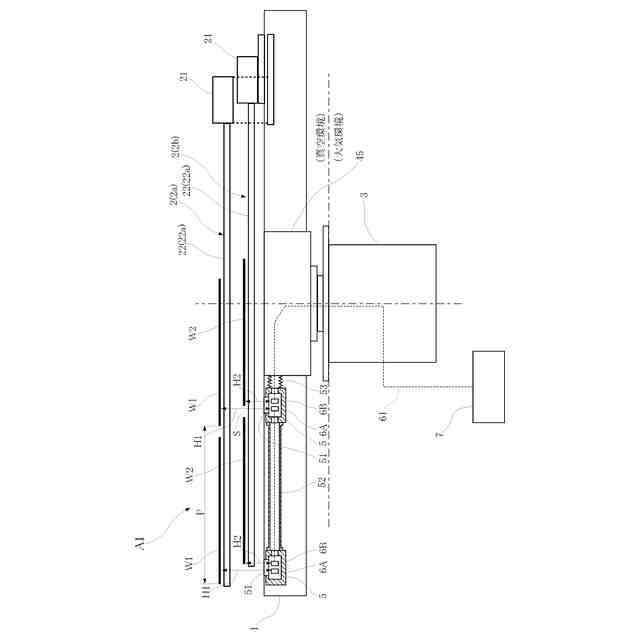
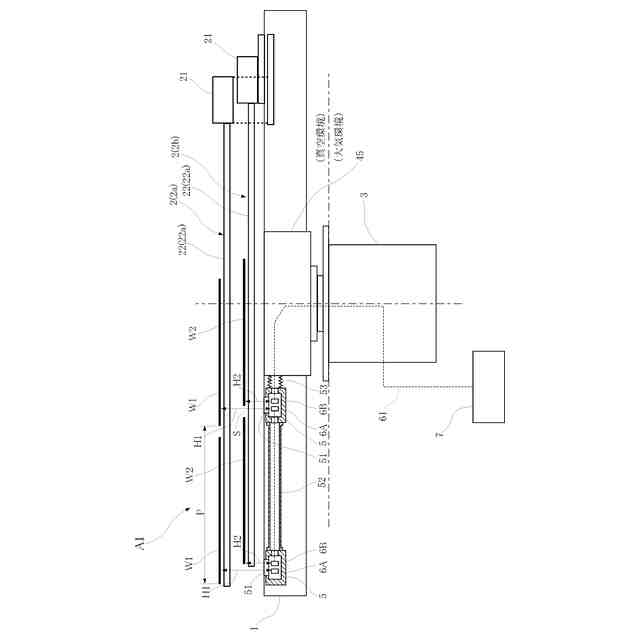
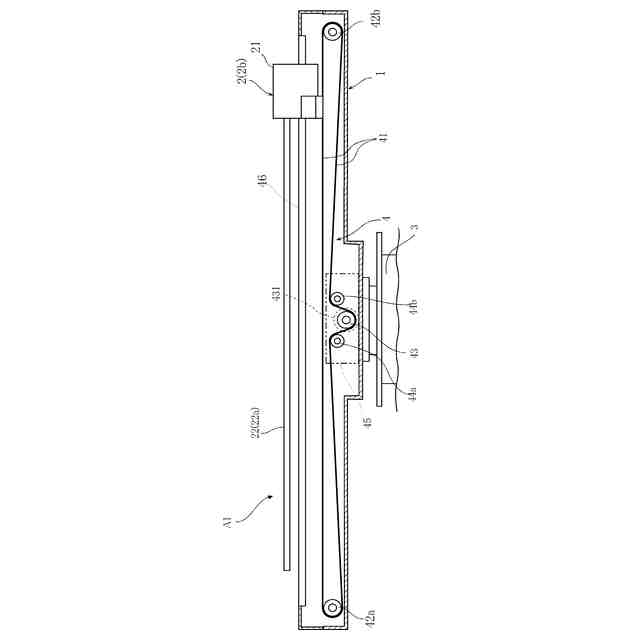
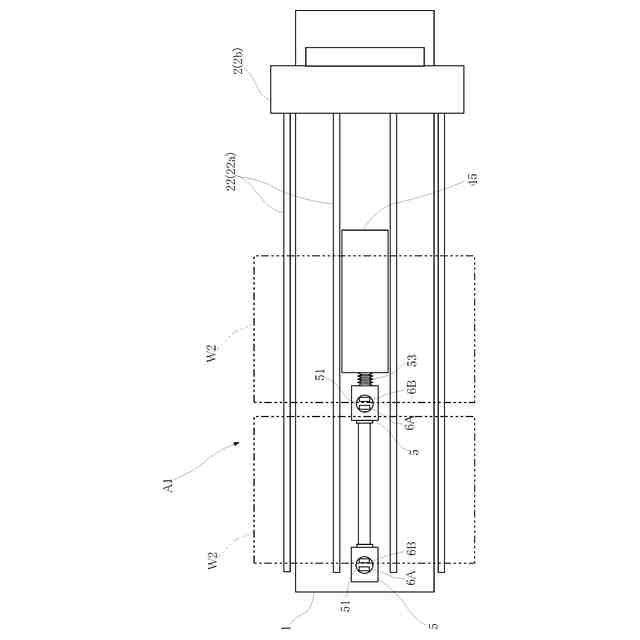
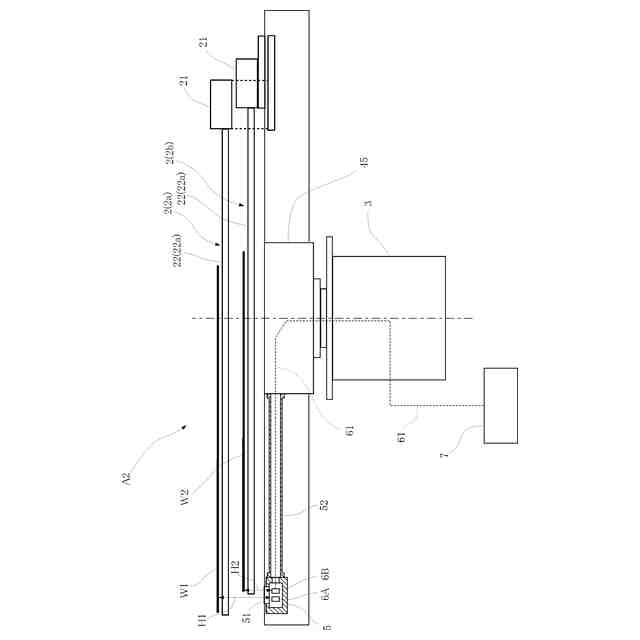
【解決手段】支持テーブル1と、当該支持テーブル1上で水平直線方向に進退移動可能に案内支持され、板状ワークW1,W2を載置可能なハンド2と、ハンド2を進退駆動する駆動機構4と、を備え、真空環境下に配置される搬送装置A1,A2,A3であって、支持テーブル1には、内部空間が大気に導通し、上部に透光窓51を有する密閉容器5と、当該密閉容器5内に収容され、透光窓51を経た上方における検出可能距離H1,H2が選択可能であり、当該検出可能距離H1,H2における物体の存否を検出可能な光学センサ6A,6Bと、が設けられている。
【選択図】図1
特許請求の範囲
【請求項1】
支持テーブルと、上記支持テーブル上で水平直線方向に進退移動可能に案内支持され、板状ワークを載置可能なハンドと、上記ハンドを進退駆動する駆動機構と、を備え、真空環境下に配置される搬送装置であって、
上記支持テーブルには、内部空間が大気に導通し、上部に透光窓を有する密閉容器と、当該密閉容器内に収容され、上記透光窓を経た上方における検出可能距離が選択可能であり、当該検出可能距離における物体の存否を検出可能な光学センサと、が設けられていることを特徴とする、搬送装置。
続きを表示(約 450 文字)
【請求項2】
上記ハンドは、当該ハンドの移動方向に並ぶ複数枚の板状ワークを載置可能であり、上記密閉容器および上記光学センサの組は、上記複数枚の板状ワークに対応して複数組設けられている、請求項1に記載の搬送装置。
【請求項3】
上記ハンドは、互いに独立して進退移動可能で上下に並ぶ上位ハンドと下位ハンドとからなり、上記光学センサは、上記上位ハンドに載る物体の存否を検出するための第1の光学センサと、上記下位ハンドに載る物体の存否を検出するための第2の光学センサとを含んでいる、請求項2に記載の搬送装置。
【請求項4】
上記ハンドは、当該ハンドの移動方向に延び、上記板状ワークが載置される複数のホーク爪を有しており、上記密閉容器と上記光学センサの組は、平面視において上記複数のホーク爪と重ならない位置に設けられている、請求項1ないし3のいずれかに記載の搬送装置。
【請求項5】
上記駆動機構は、ベルト駆動機構である、請求項1に記載の搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送装置に関し、より詳しくは、FPD(フラットパネルディスプレイ)用ガラス基板等の板状ワークを直線状に搬送することができる搬送装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
この種の搬送装置の一例として、特許文献1に記載されたものがある。同文献に記載された搬送装置は、支持テーブルに設けたリニアガイド機構により、ハンドを水平直線方向に移動可能に支持し、ハンドをベルト駆動機構により進退駆動するように構成されている。支持テーブルは通常、昇降および旋回が可能となっている。
【0003】
この種の搬送装置は、真空かつ高温環境下において、板状ワークを前工程の処理室から受け取り、次工程の処理室へ搬入するといった搬送を行う等のために用いられる。この場合、ハンドに板状ワークが載せられているべき時点において、板状ワークが正しくハンドに載せられているか否かを確認することが、板状ワークに対する一連の工程を円滑に行う上で重要である。
【0004】
特許文献1に記載された搬送装置においては、ハンドに近接センサ等のセンサを配置する構成を採用しているが、真空環境に晒されるハンドにセンサを配置し、信号線を介して大気環境下にある制御部に信号を導く構成をとりつつ安定的な作動を保障するには、種々の困難を伴う。なお、最近では、板状ワークを複数枚1つのハンドに載せて搬送し、板状ワークに対する一連の工程の更なる効率化を図ろうとする動きがみられるが、この場合、複数枚の板状ワークが正しく1つのハンドに載せられているかどうかの確認は、より一層重要となる。
【先行技術文献】
【特許文献】
【0005】
特開2014-65092号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、上記した事情のもとで考え出されたものであって、直線方向に進退動させられるハンドに載せて板状ワークを搬送する搬送装置において、真空環境下にセンサや信号線を配することなくハンド上のワークの存否を検知することができるように構成することをその課題としている。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明では、次の技術的手段を採用した。
【0008】
本発明により提供される搬送装置は、支持テーブルと、上記支持テーブル上で水平直線方向に進退移動可能に案内支持され、板状ワークを載置可能なハンドと、上記ハンドを進退駆動する駆動機構と、を備え、真空環境下に配置される搬送装置であって、上記支持テーブルには、内部空間が大気に導通し、上部に透光窓を有する密閉容器と、当該密閉容器内に収容され、上記透光窓を経た上方における検出可能距離が選択可能であり、当該検出可能距離における物体の存否を検出可能な光学センサと、が設けられていることを特徴とする。
【0009】
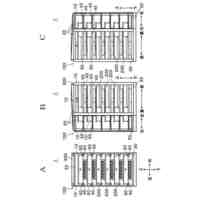
好ましい実施の形態では、上記ハンドは、当該ハンドの移動方向に並ぶ複数枚の板状ワークを載置可能であり、上記密閉容器および上記光学センサの組は、上記複数枚の板状ワークに対応して複数組設けられている。
【0010】
好ましい実施の形態では、上記ハンドは、互いに独立して進退移動可能で上下に並ぶ上位ハンドと下位ハンドとからなり、上記光学センサは、上記上位ハンドに載る物体の存否を検出するための第1の光学センサと、上記下位ハンドに載る物体の存否を検出するための第2の光学センサとを含んでいる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイヘン
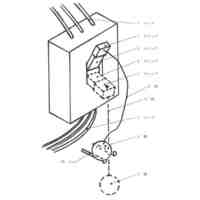
変圧器
1か月前
株式会社ダイヘン
制御装置
1か月前
株式会社ダイヘン
移動装置
5日前
株式会社ダイヘン
電源装置
1か月前
株式会社ダイヘン
給電装置
28日前
株式会社ダイヘン
溶接電源装置
1か月前
株式会社ダイヘン
固相接合装置
1か月前
株式会社ダイヘン
溶接電源装置
1か月前
株式会社ダイヘン
溶接電源装置
27日前
株式会社ダイヘン
電力変換装置
今日
株式会社ダイヘン
変換装置集積体
今日
株式会社ダイヘン
高周波電源装置
1か月前
株式会社ダイヘン
スポット接合装置
26日前
株式会社ダイヘン
フラックス回収装置
1か月前
株式会社ダイヘン
コイル及び電力授受装置
1か月前
株式会社ダイヘン
サブマージアーク溶接機
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
吸引ノズルおよびその製造方法
1か月前
株式会社ダイヘン
固相接合装置および固相接合方法
1か月前
株式会社ダイヘン
制御回路、および、蓄電池システム
1か月前
株式会社ダイヘン
固相接合装置および固相接合システム
28日前
株式会社ダイヘン
DC電源装置、およびパルス発生装置
26日前
株式会社ダイヘン
充電予約管理装置及び充電予約管理方法
21日前
株式会社ダイヘン
集積構造体及びバッテリーパックの集積方法
1か月前
株式会社ダイヘン
プログラム、情報処理方法、及び情報処理装置
20日前
株式会社ダイヘン
ベルト伝動機構およびこれを備えた搬送ロボット
9日前
株式会社ダイヘン
ハンド装置、支持用ユニット及びハンド装置の制御方法
5日前
株式会社ダイヘン
無線給電システム
8日前
株式会社ダイヘン
フラットパネル製造システム及びそれに用いられるロボット制御装置
22日前
個人
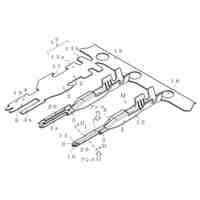
雄端子
22日前
個人
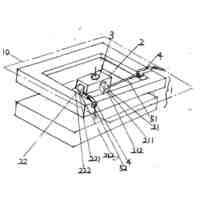
後付地震遮断機
26日前
個人
超精密位置決め機構
27日前
東レ株式会社
積層多孔質膜
1か月前
愛知電機株式会社
電力機器
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ