TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025126538
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024022799
出願日
2024-02-19
発明の名称
ハンド装置、支持用ユニット及びハンド装置の制御方法
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
15/00 20060101AFI20250822BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】利便性の高いハンド装置が求められている。
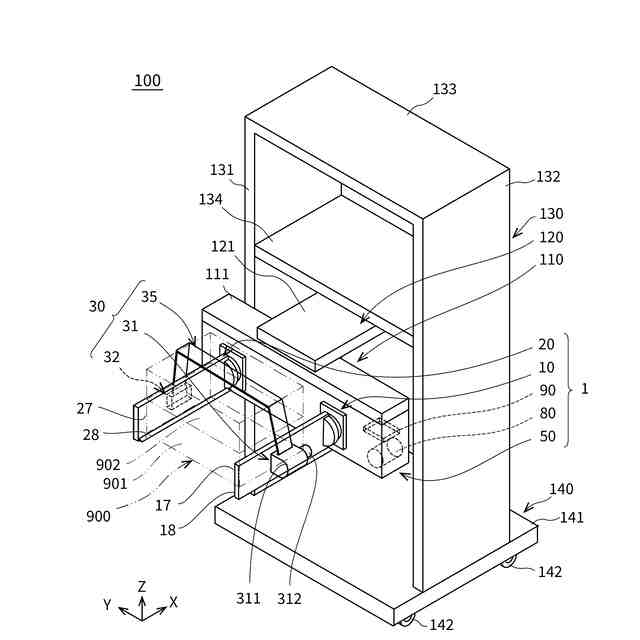
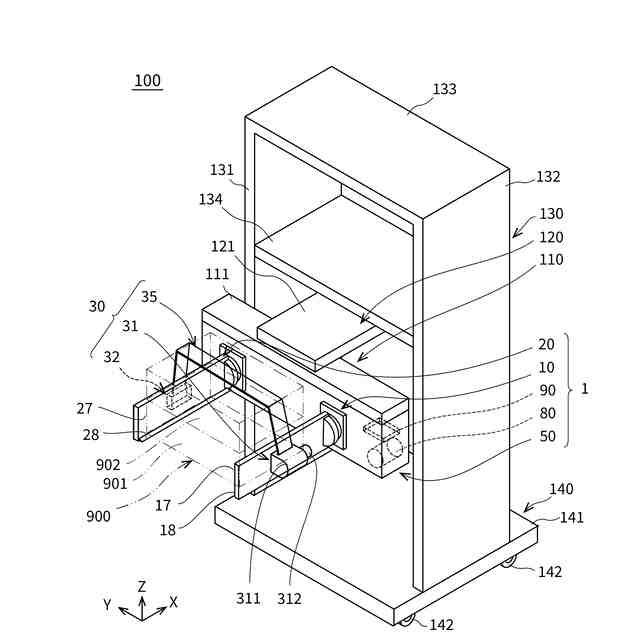
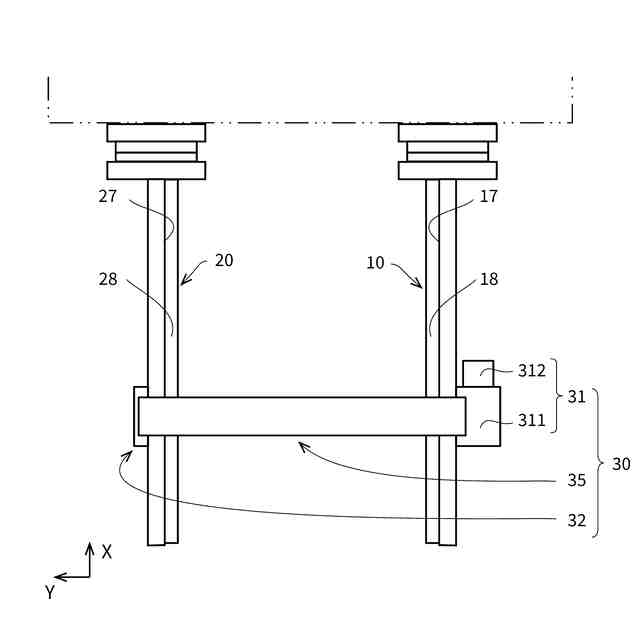
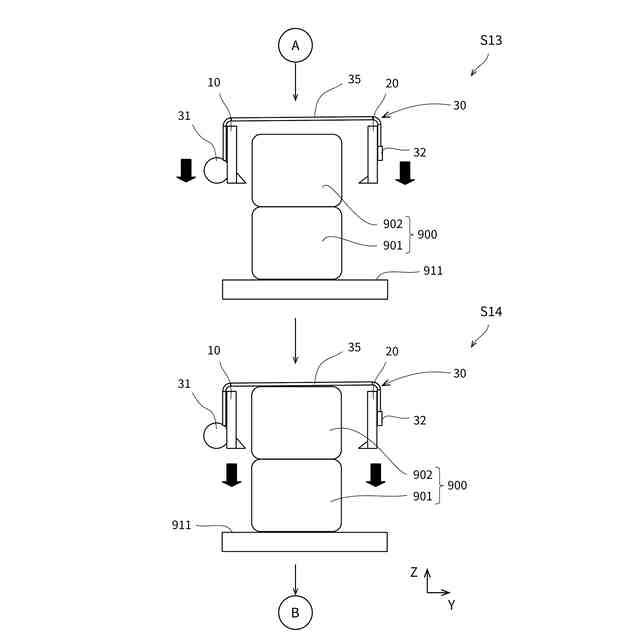
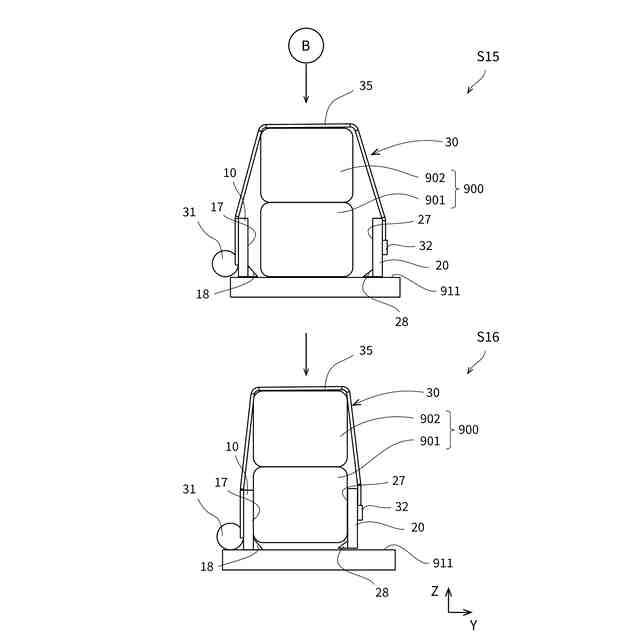
【解決手段】左右方向において対象物900を間に挟んで並ぶように配置可能な第一ハンド10及び第二ハンド20と、第一ハンド10に固定されている第一固定部31と、第二ハンド20に固定されている第二固定部32と、第一固定部31と第二固定部32とにまたがって配置されている柔軟なラッシング部材35とを備え、第一固定部31から第二固定部32までのラッシング部材35の長さが変化可能に構成されており、第一ハンド10と第二ハンド20との間にある対象物900を、ラッシング部材35の一部を対象物900よりも上方に位置させた状態で第一ハンド10及び第二ハンド20の少なくとも一方を用いて挟持又は持ち上げ可能に構成されている、ハンド装置1により、対象物900を安定的に挟持又は持ち上げることができる。
【選択図】図1
特許請求の範囲
【請求項1】
左右方向において対象物を間に挟んで並ぶように配置可能な第一ハンド及び第二ハンドと、
前記第一ハンドに固定されている第一固定部と、
前記第二ハンドに固定されている第二固定部と、
前記第一固定部と前記第二固定部とにまたがって配置されている柔軟なラッシング部材とを備え、
前記第一固定部から前記第二固定部までの前記ラッシング部材の長さが変化可能に構成されており、
前記第一ハンドと前記第二ハンドとの間にある対象物を、前記ラッシング部材の一部を当該対象物よりも上方に位置させた状態で前記第一ハンド及び前記第二ハンドの少なくとも一方を用いて挟持又は持ち上げ可能に構成されている、ハンド装置。
続きを表示(約 980 文字)
【請求項2】
前記第一固定部及び前記第二固定部の少なくとも一方は、前記第一固定部から前記第二固定部までの前記ラッシング部材を巻き取り及び繰出し可能に構成された部材長変更手段を有している、請求項1に記載のハンド装置。
【請求項3】
前記部材長変更手段は、前記ラッシング部材の巻き取るためのアクチュエータを有する、請求項2に記載のハンド装置。
【請求項4】
前記ラッシング部材は、伸縮性を有することにより、前記第一固定部から前記第二固定部までの長さが変化可能である、請求項1に記載のハンド装置。
【請求項5】
左右方向において対象物を間に挟んで並ぶように配置可能な第一ハンド及び第二ハンドを有するハンド装置に取り付けられて、前記対象物を前記第一ハンド及び前記第二ハンドの少なくとも一方を用いて挟持又は持ち上げる場合において当該対象物に接触させて用いられる支持用ユニットであって、
前記第一ハンドに固定される第一固定部と、
前記第二ハンドに固定される第二固定部と、
前記第一固定部と前記第二固定部とにまたがって配置されている柔軟なラッシング部材とを備え、
前記第一固定部から前記第二固定部までの前記ラッシング部材の長さが変化可能に構成されている、支持用ユニット。
【請求項6】
動力源を用いて前記第一ハンド及び前記第二ハンドの少なくとも一方の位置を変更可能に構成されている請求項1に記載のハンド装置の制御方法であって、
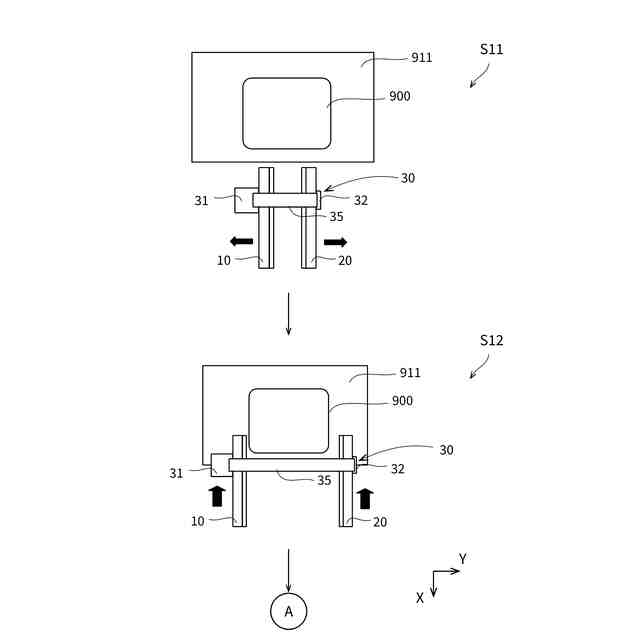
左右方向において前記第一ハンドと前記第二ハンドとの間に前記対象物が位置し、かつ、前記対象物よりも上方に前記ラッシング部材が位置するように、前記第一ハンド及び前記第二ハンドの少なくとも一方を前記対象物の上方に配置する配置ステップと、
前記第一ハンド及び前記第二ハンドのうち前記対象物の上方にあるものを下方に変位させ、前記対象物の上部に前記ラッシング部材の一部を接触させる接触ステップと、
前記対象物の側面に前記第一ハンド及び前記第二ハンドを接触させて、前記対象物の上部に前記ラッシング部材の一部が接触した状態で前記第一ハンドと前記第二ハンドとで前記対象物を挟持又は持ち上げる保持ステップとを含む、ハンド装置の制御方法。
発明の詳細な説明
【技術分野】
【0001】
この発明は、対象物を2つのハンドで挟持可能なハンド装置、支持用ユニット及びハンド装置の制御方法に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、例えば製造現場や倉庫等において、対象物を搬送する用途などに用いられるロボットシステムや、製造ライン上の対象物を扱うロボット等の装置がある。この種の装置には、対象物を挟持したり持ち上げたりすることができるように構成されたハンド装置が設けられる場合がある。
【0003】
下記特許文献1には、挟み込みタイプのハンドで段ボールを搬送するロボットシステムが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2014-100755号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ハンド装置には、さまざまな用途がある。例えば、ハンド装置の用途には、積み上げられた2以上のコンポーネントからなる対象物や、挟持等しただけでは安定しにくい形状等を有する対象物などを運搬するようなタスクがあり得る。このような場面にも対応可能なハンド装置は、より有用である。
【0006】
この発明は、利便性の高いハンド装置、支持用ユニット及びハンド装置の制御方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
本第一の発明のハンド装置は、左右方向において対象物を間に挟んで並ぶように配置可能な第一ハンド及び第二ハンドと、第一ハンドに固定されている第一固定部と、第二ハンドに固定されている第二固定部と、第一固定部と第二固定部とにまたがって配置されている柔軟なラッシング部材とを備え、第一固定部から第二固定部までのラッシング部材の長さが変化可能に構成されており、第一ハンドと第二ハンドとの間にある対象物を、ラッシング部材の一部を対象物よりも上方に位置させた状態で第一ハンド及び第二ハンドの少なくとも一方を用いて挟持又は持ち上げ可能に構成されている、ハンド装置である。
【0008】
かかる構成により、ラッシング部材により対象物を上方から押さえ込み、対象物を安定的に挟持又は持ち上げることができるため、ハンド装置の利便性が高くなる。
【0009】
また、本第二の発明のハンド装置は、第一の発明に対して、第一固定部及び第二固定部の少なくとも一方は、第一固定部から第二固定部までのラッシング部材を巻き取り及び繰出し可能に構成された部材長変更手段を有している、ハンド装置である。
【0010】
かかる構成により、ラッシング部材を巻き取って対象物を押さえ込むことができ、対象物を安定的に挟持又は持ち上げることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ