TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025117181
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011905
出願日
2024-01-30
発明の名称
フラットパネル製造システム及びそれに用いられるロボット制御装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H01L
21/677 20060101AFI20250804BHJP(基本的電気素子)
要約
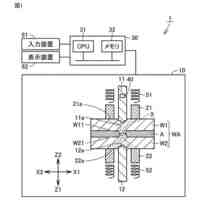
【課題】搬送ロボットが配置されているチャンバの開口部に対して、当該搬送ロボットにおいてワークを保持する保持部の先端を適切に進入させることによって、当該開口部近傍での衝突を未然に防止することができるフラットパネル製造システム及びそれに用いられるロボット制御装置を提供することである。
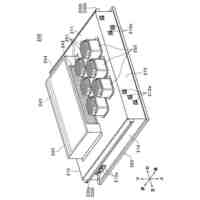
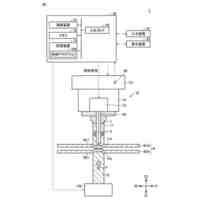
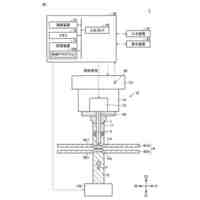
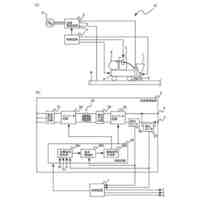
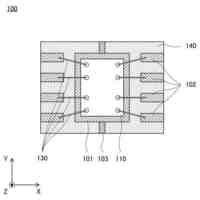
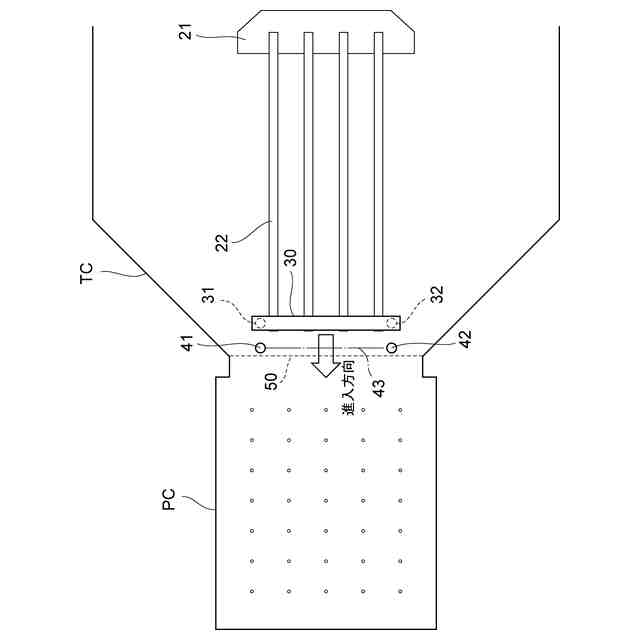
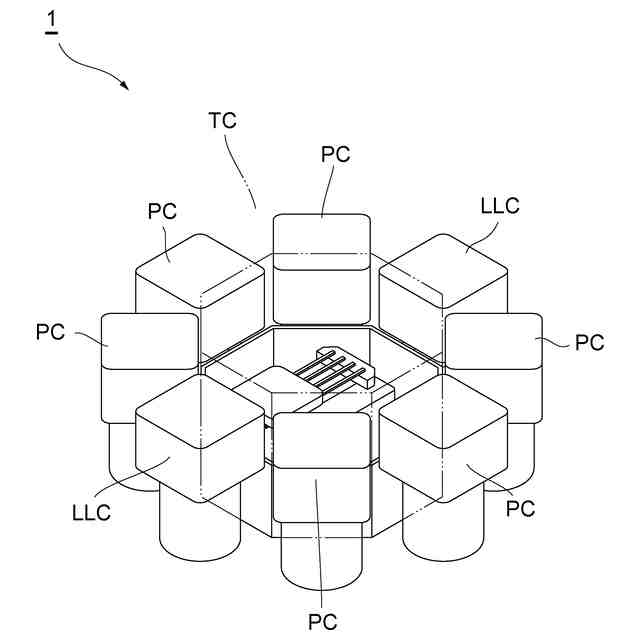
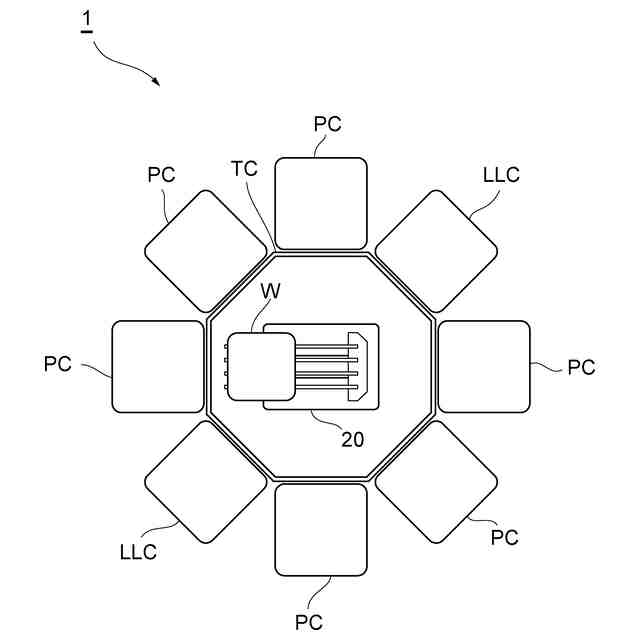
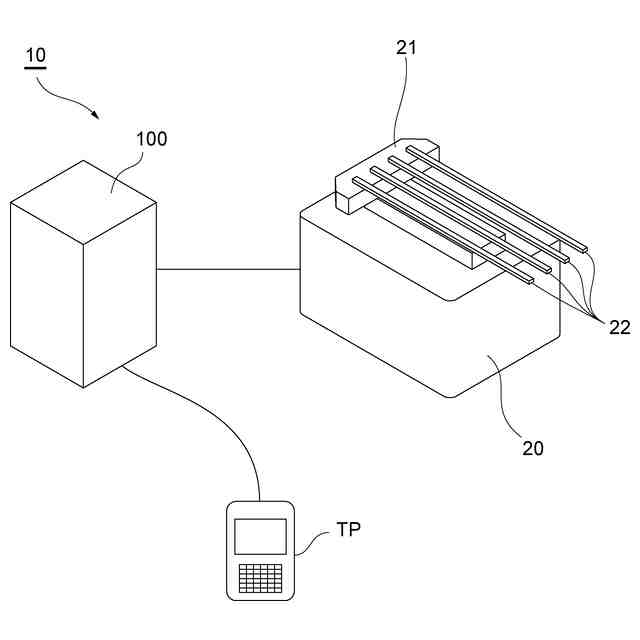
【解決手段】フラットパネル製造システム1は、第1チャンバTCと第2チャンバPCとの間に配置される目印41,42と、搬送ロボット20の保持部22に配置されるセンサ装置30と、保持部22を第1チャンバTCの開口部50に進入させる場合、センサ装置30によって目印41,42を検知する検知手段120と、目印41,42の検知状況に基づいて、保持部22を開口部50に進入させるか否かを判定する進入判定手段140と、を備える。
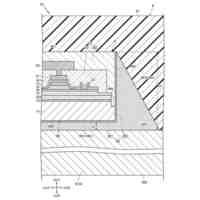
【選択図】図6
特許請求の範囲
【請求項1】
ワークを搬送する搬送ロボットと、当該搬送ロボットが配置されている第1チャンバと、当該第1チャンバの開口部に対向するように当該第1チャンバに隣接して配置される第2チャンバとを備え、フラットパネルを製造するフラットパネル製造システムであって、
前記第1チャンバの開口部に対応するように前記第1チャンバと前記第2チャンバとの間に配置される目印と、
前記ワークを保持する前記搬送ロボットの保持部に配置されるセンサ装置と、
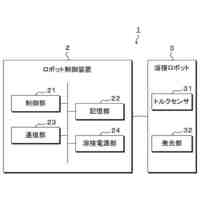
前記搬送ロボットの動作を制御するロボット制御手段と、
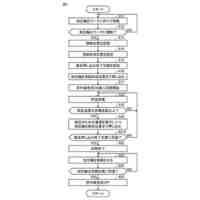
前記ロボット制御手段によって前記第1チャンバから前記第2チャンバに向かって前記搬送ロボットの保持部を動作させて前記第1チャンバの開口部に進入させる場合、前記センサ装置によって前記目印を検知する検知手段と、
前記検知手段による前記目印の検知状況に基づいて、前記搬送ロボットの保持部を前記第1チャンバの開口部に進入させるか否かを判定する進入判定手段と、を備える、
フラットパネル製造システム。
続きを表示(約 1,000 文字)
【請求項2】
前記ロボット制御手段は、
前記進入判定手段によって進入させると判定された場合、前記搬送ロボットの保持部を前記第1チャンバの開口部に進入させ、
前記進入判定手段によって進入させないと判定された場合、傾き異常として前記搬送ロボットを停止させる、
請求項1に記載のフラットパネル製造システム。
【請求項3】
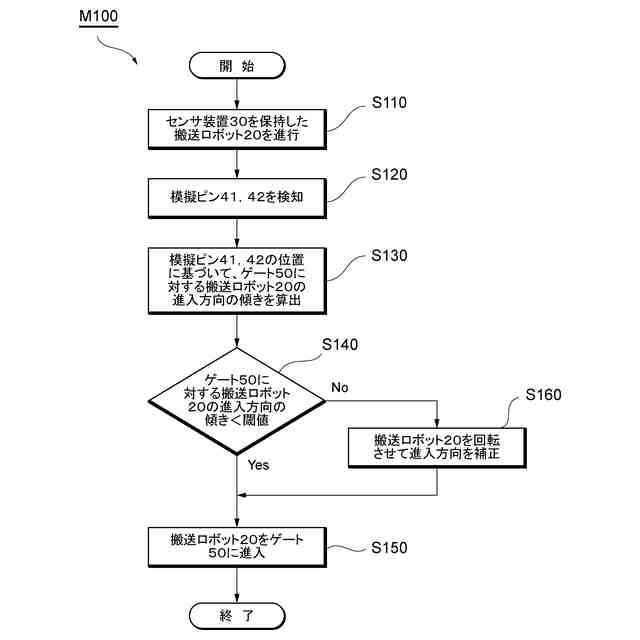
前記検知手段によって検知された目印に基づいて、前記搬送ロボットの保持部が前記第1チャンバの開口部に進入する進入方向と、前記開口部との傾きを算出する傾き算出手段を、さらに備え、
前記進入判定手段は、前記傾き算出手段によって算出された傾きに基づいて、前記搬送ロボットの保持部を前記第1チャンバの開口部に進入させるか否かを判定する、
請求項1に記載のフラットパネル製造システム。
【請求項4】
前記進入判定手段は、
前記傾きが閾値未満である場合、前記ロボット制御手段によって前記第1チャンバから前記第2チャンバに向かって前記搬送ロボットの保持部を動作させて前記第1チャンバの開口部に進入させ、
前記傾きが閾値以上である場合、前記搬送ロボットの保持部の進入方向が変更されるように、前記ロボット制御手段によって前記搬送ロボットを動作させる、
請求項3に記載のフラットパネル製造システム。
【請求項5】
前記目印は、前記第1チャンバ内に配置されている、
請求項1に記載のフラットパネル製造システム。
【請求項6】
フラットパネルを製造するフラットパネル製造システムに用いられる搬送ロボットの動作を制御するロボット制御装置であって、
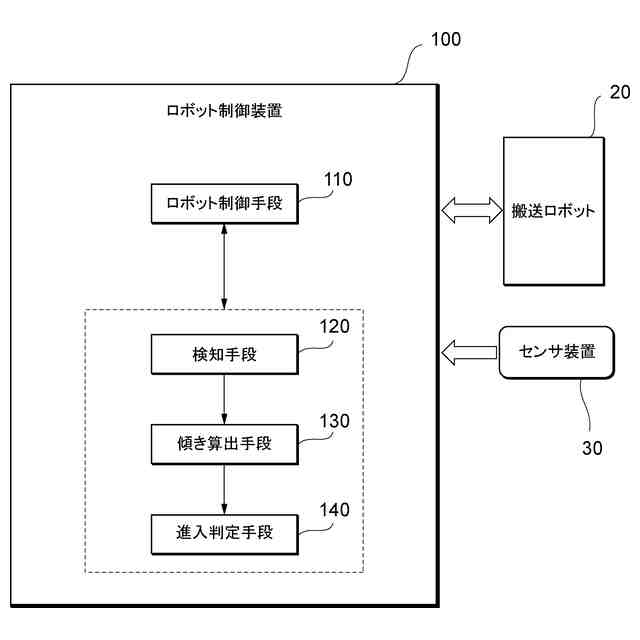
前記搬送ロボットの動作を制御するロボット制御手段と、
前記搬送ロボットが配置されている第1チャンバから当該第1チャンバの開口部に対向するように当該第1チャンバに隣接して配置される第2チャンバに向かって、前記ロボット制御手段によって、ワークを保持する前記搬送ロボットの保持部を動作させて前記第1チャンバの開口部に進入させる場合、前記搬送ロボットの保持部に配置されるセンサ装置によって、前記第1チャンバの開口部に対応するように前記第1チャンバと前記第2チャンバとの間に配置される目印を検知する検知手段と、
前記検知手段による前記目印の検知状況に基づいて、前記搬送ロボットの保持部を前記第1チャンバの開口部に進入させるか否かを判定する進入判定手段と、を備える、
ロボット制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、フラットパネル製造システム及びそれに用いられるロボット制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
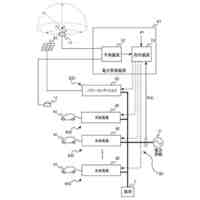
近年、産業界において、多くの産業用ロボットが普及している。例えば、液晶ディスプレイや有機ELディスプレイなどのフラットパネルディスプレイ(FPD:Flat Panel Display)を含む大型のフラットパネル用のガラス基板に対して処理を行うための大型の製造システムがある。
【0003】
このような大型の製造システムでは、ガラス基板などのワークに対して種々の処理を行うために、各処理に対応するプロセスチャンバが複数配置されている。さらに、搬送ロボット(搬送装置)がトランスファチャンバに配置されており、当該搬送ロボット(搬送装置)によって、各プロセスチャンバにおける所望の位置へワークが搬送される。
【0004】
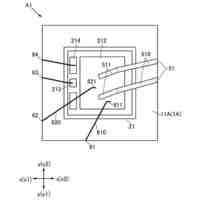
特許文献1では、搬送装置は、支持ピックの先端に光学センサを備えて、搬送室において当該支持ピックを上方移動させながら先端方向に光を照射することによって、搬送室とロードロック室との間の開口部の上端位置を特定している。また、ロードロック室において、支持ピックを上方移動/回転移動させながら先端方向/下方向に光を照射することによって、バッファ(溝)の上端位置/側壁位置を特定している。そして、特定された開口部の上端位置やバッファ(溝)の上端位置/側壁位置に基づいて、搬送装置の動作が補正される。このように、特許文献1では、搬送装置の動作位置に関する調整を自動的に行っている。
【先行技術文献】
【特許文献】
【0005】
特開2019-220588号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1では、搬送室とロードロック室との間の開口部の上端位置を特定しているものの、開口部の横方向(幅方向)と搬送装置との位置関係については考慮されていない。
【0007】
そこで、本発明は、搬送ロボットが配置されているチャンバの開口部に対して、当該搬送ロボットにおいてワークを保持する保持部の先端を適切に進入させることによって、当該開口部近傍での衝突を未然に防止することができるフラットパネル製造システム及びそれに用いられるロボット制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一態様に係るフラットパネル製造システムは、ワークを搬送する搬送ロボットと、当該搬送ロボットが配置されている第1チャンバと、当該第1チャンバの開口部に対向するように当該第1チャンバに隣接して配置される第2チャンバとを備え、フラットパネルを製造するフラットパネル製造システムであって、第1チャンバの開口部に対応するように第1チャンバと前記第2チャンバとの間に配置される目印と、ワークを保持する搬送ロボットの保持部に配置されるセンサ装置と、搬送ロボットの動作を制御するロボット制御手段と、ロボット制御手段によって第1チャンバから第2チャンバに向かって搬送ロボットの保持部を動作させて第1チャンバの開口部に進入させる場合、センサ装置によって目印を検知する検知手段と、検知手段による前記目印の検知状況に基づいて、搬送ロボットの保持部を第1チャンバの開口部に進入させるか否かを判定する進入判定手段と、を備える。
【0009】
この態様によれば、第1チャンバの開口部に対応するように第1チャンバと第2チャンバとの間に目印が配置され、ワークを保持する搬送ロボットの保持部にセンサ装置が配置されている。検知手段は、第1チャンバから第2チャンバに向かって搬送ロボットの保持部を動作させて第1チャンバの開口部に進入させる場合、センサ装置によって目印を検知し、その目印の検知状況に基づいて、搬送ロボットの保持部を第1チャンバの開口部に進入させるか否かを判定する。これにより、第1チャンバから第2チャンバに向かって搬送ロボットの保持部を動作させて第1チャンバの開口部に進入させる場合、進入させるか否かを適切に判定して、開口部近傍での衝突を未然に防止することができる。
【0010】
上記態様において、ロボット制御手段は、進入判定手段によって進入させると判定された場合、搬送ロボットの保持部を第1チャンバの開口部に進入させ、進入判定手段によって進入させないと判定された場合、傾き異常として搬送ロボットを停止させてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイヘン
移動装置
1か月前
株式会社ダイヘン
電力変換装置
28日前
株式会社ダイヘン
固相接合装置
21日前
株式会社ダイヘン
固相接合装置
21日前
株式会社ダイヘン
固相接合装置
21日前
株式会社ダイヘン
固相接合装置
21日前
株式会社ダイヘン
電力管理装置
21日前
株式会社ダイヘン
プラズマ発生器
2日前
株式会社ダイヘン
変換装置集積体
28日前
株式会社ダイヘン
ロボットシステム
2日前
株式会社ダイヘン
サブマージアーク溶接システム
22日前
株式会社ダイヘン
交流パルスアーク溶接制御方法
22日前
株式会社ダイヘン
交流パルスアーク溶接制御方法
26日前
株式会社ダイヘン
サブマージアーク溶接制御方法
26日前
株式会社ダイヘン
固相接合装置および固相接合システム
26日前
株式会社ダイヘン
固相接合装置および固相接合装置の制御方法
26日前
株式会社ダイヘン
プログラム、情報処理方法、及び情報処理装置
1か月前
株式会社ダイヘン
ベルト伝動機構およびこれを備えた搬送ロボット
1か月前
株式会社ダイヘン
ハンド装置、支持用ユニット及びハンド装置の制御方法
1か月前
株式会社ダイヘン
無線給電システム
1か月前
株式会社ダイヘン
サブマージアーク溶接の溶接方法、および、サブマージアーク溶接システム
22日前
個人
安全なNAS電池
26日前
個人
フリー型プラグ安全カバー
1か月前
日本発條株式会社
積層体
2日前
東レ株式会社
多孔質炭素シート
21日前
ローム株式会社
半導体装置
今日
個人
防雪防塵カバー
2日前
ローム株式会社
半導体装置
今日
ローム株式会社
半導体装置
今日
エイブリック株式会社
半導体装置
23日前
エイブリック株式会社
半導体装置
23日前
キヤノン株式会社
電子機器
21日前
ローム株式会社
半導体装置
21日前
東レ株式会社
ガス拡散層の製造方法
21日前
ニチコン株式会社
コンデンサ
14日前
ニチコン株式会社
コンデンサ
14日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ