TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025140282
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024039582
出願日
2024-03-14
発明の名称
ロボットシステム
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20250919BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業者の利便性を向上させることができるロボットシステムを提供する。
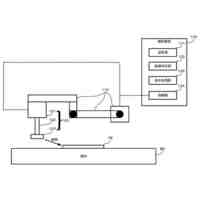
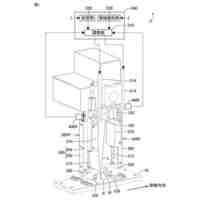
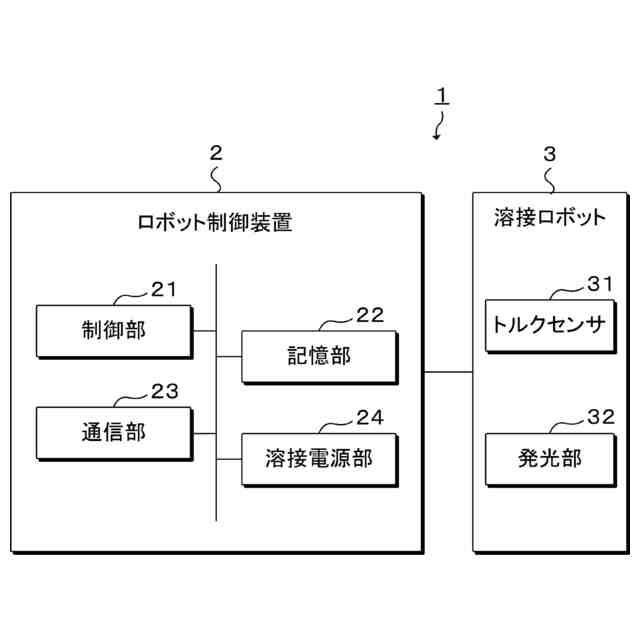
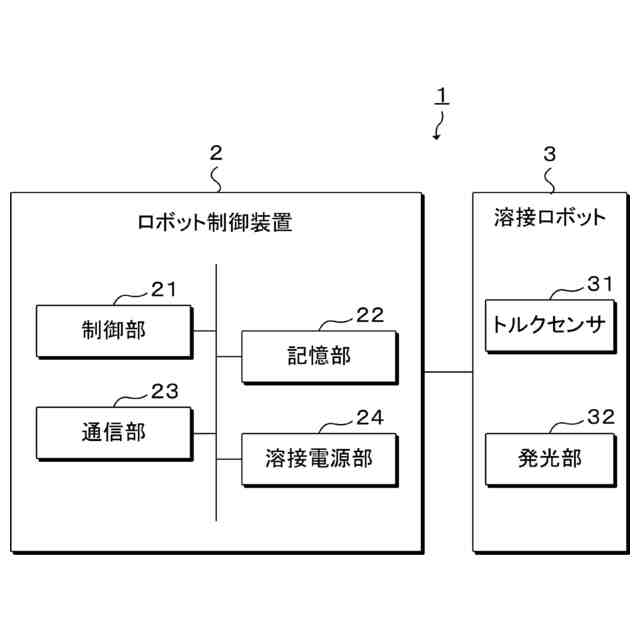
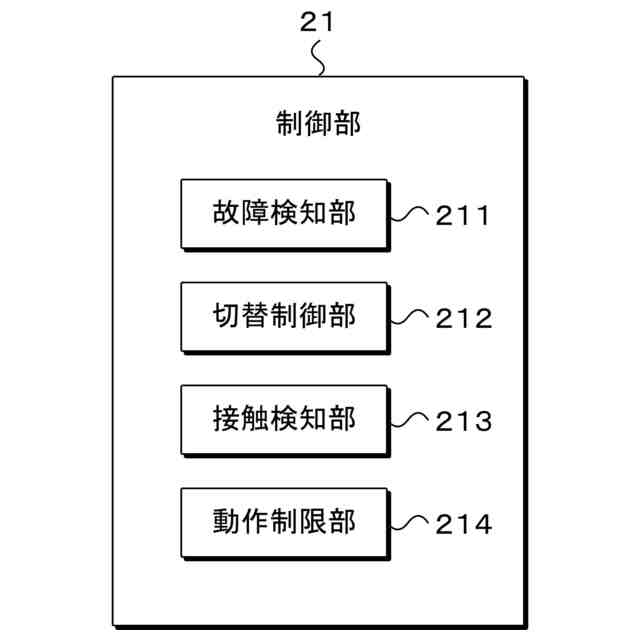
【解決手段】ロボットシステム1は、溶接ロボット3の動作状態を、作業者と協働して動作する協働状態と、作業者と協働せずに動作する非協働状態とのいずれかに切り替える切替制御部と、溶接ロボット3への接触を検知する接触検知部と、溶接ロボット3の動作状態が協働状態であり、かつ接触検知部により溶接ロボット3への接触が検知された場合に、溶接ロボット3の動作を制限する動作制限部と、協働状態と非協働状態とで異なる内容による通知を出力する状態通知部と、状態通知部の故障を検知する故障検知部と、を備え、切替制御部は、故障検知部により状態通知部の故障が検知された場合に、溶接ロボット3の動作状態を協働状態に固定する。
【選択図】図1
特許請求の範囲
【請求項1】
産業用ロボットの動作状態を、作業者と協働して動作する協働状態と、作業者と協働せずに動作する非協働状態とのいずれかに切り替える切替制御部と、
前記産業用ロボットへの接触を検知する接触検知部と、
前記動作状態が前記協働状態であり、かつ前記接触検知部により前記産業用ロボットへの接触が検知された場合に、前記産業用ロボットの動作を制限する動作制限部と、
前記協働状態と前記非協働状態とで異なる内容による通知を出力する状態通知部と、
前記状態通知部の故障を検知する故障検知部と、
を備え、
前記切替制御部は、前記故障検知部により前記状態通知部の故障が検知された場合に、前記動作状態を前記協働状態に固定する、
ロボットシステム。
続きを表示(約 480 文字)
【請求項2】
前記切替制御部は、前記産業用ロボットのモードが、作業者が前記産業用ロボットを動かして動作を教示するモードである場合には、前記故障検知部により前記状態通知部の故障が検知されても、前記動作状態を前記協働状態に固定しない、
請求項1記載のロボットシステム。
【請求項3】
前記切替制御部は、前記故障検知部により前記状態通知部の故障が検知された場合に、前記状態通知部が故障したことを知らせるメッセージ又は映像を外部の端末装置に表示させる、
請求項1記載のロボットシステム。
【請求項4】
前記切替制御部は、前記動作状態を前記協働状態に固定した場合に、前記協働状態であることを報知する音を出力させる、
請求項1記載のロボットシステム。
【請求項5】
前記状態通知部は、複数の発光ダイオードを含み、
前記切替制御部は、前記故障検知部により少なくとも一つの前記発光ダイオードの故障が検知された場合に、前記動作状態を前記協働状態に固定する、
請求項1記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
下記特許文献1には、人や物体が危険エリアに侵入したことを検知したときにロボットの動作を制限させる協働状態と、人や物体を検知せずにロボットを通常に動作させる非協働状態と、を切り替える協働ロボットが開示されている。協働状態と非協働状態のどちらに切り替えられているのかを視覚的に確認し易くする手法の一つとして、下記特許文献2には、ロボットの状態に応じて発光色を変える発光ダイオードをロボットに備えることが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-165821号公報
特開2021-45820号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、ロボットに発光ダイオードを備えても、発光ダイオードが故障してしまうと、例えば、ロボットとの協働エリアで作業する作業者が、ロボットの状態を視覚的に確認できなくなるため、作業者の利便性が低下することになる。
【0005】
そこで、本発明は、作業者の利便性を向上させることができるロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係るロボットシステムは、産業用ロボットの動作状態を、作業者と協働して動作する協働状態と、作業者と協働せずに動作する非協働状態とのいずれかに切り替える切替制御部と、産業用ロボットへの接触を検知する接触検知部と、動作状態が協働状態であり、かつ接触検知部により産業用ロボットへの接触が検知された場合に、産業用ロボットの動作を制限する動作制限部と、協働状態と非協働状態とで異なる内容による通知を出力する状態通知部と、状態通知部の故障を検知する故障検知部と、を備え、切替制御部は、故障検知部により状態通知部の故障が検知された場合に、動作状態を協働状態に固定する。
【0007】
この態様によれば、産業用ロボットの動作状態を協働状態と非協働状態とのいずれかに切り替え、産業用ロボットの動作状態が協働状態であり、かつ産業用ロボットへの接触が検知された場合に、産業用ロボットの動作を制限することができるとともに、協働状態と非協働状態とで異なる内容による通知を出力する状態通知部の故障が検知された場合に、産業用ロボットの動作状態を協働状態に固定することができる。
【0008】
これにより、協働状態で動作しているときに接触が検知された場合には、産業用ロボットの動作を制限することができ、協働状態と非協働状態とを判別させる状態通知部が故障した場合には、産業用ロボットの動作状態を協働状態に固定することが可能となる。
【0009】
上記態様において、切替制御部は、産業用ロボットのモードが、作業者が産業用ロボットを動かして動作を教示するモードである場合には、故障検知部により状態通知部の故障が検知されても、動作状態を協働状態に固定しないこととしてもよい。
【0010】
この態様によれば、作業者が非協働状態で産業用ロボットを動かしながら動作を教示する場合には、状態通知部が故障しても非協働状態のまま作業を続けることが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイヘン
充電装置
今日
株式会社ダイヘン
充電装置
2か月前
株式会社ダイヘン
充電装置
2か月前
株式会社ダイヘン
充電装置
2か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社ダイヘン
充電装置
2か月前
株式会社ダイヘン
溶接装置
14日前
株式会社ダイヘン
制御装置
2か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
送配電装置
5日前
株式会社ダイヘン
回生ユニット
2か月前
株式会社ダイヘン
溶接電源装置
2か月前
株式会社ダイヘン
加工システム
今日
株式会社ダイヘン
研削システム
1か月前
株式会社ダイヘン
電力システム
2か月前
株式会社ダイヘン
電極交換装置
1か月前
株式会社ダイヘン
電圧調整装置
7日前
株式会社ダイヘン
パルス電源装置
2か月前
株式会社ダイヘン
変圧器組立装置
2か月前
株式会社ダイヘン
インバータ装置
2か月前
株式会社ダイヘン
インバータ装置
1か月前
株式会社ダイヘン
レーザ接合装置
1か月前
株式会社ダイヘン
パワーモジュール
2か月前
株式会社ダイヘン
熱加工用電源装置
1か月前
株式会社ダイヘン
パワーモジュール
2か月前
株式会社ダイヘン
パワーモジュール
2か月前
株式会社ダイヘン
熱加工用電源装置
1か月前
株式会社ダイヘン
積層造形システム
1か月前
株式会社ダイヘン
積層造形システム
1か月前
株式会社ダイヘン
積層造形システム
1か月前
株式会社ダイヘン
溶接ワイヤ送給装置
1か月前
株式会社ダイヘン
溶接ワイヤ送給機構
1か月前
株式会社ダイヘン
アーク溶接システム
2か月前
株式会社ダイヘン
溶接ワイヤ送給機構
1か月前
株式会社ダイヘン
直流パルス電源装置
2か月前
株式会社ダイヘン
パルスアーク溶接制御方法
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ