TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025152977
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055198
出願日
2024-03-29
発明の名称
搬送装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20251002BHJP(基本的電気素子)
要約
【課題】真空環境下で支持テーブル上を直線方向に進退動するハンドに載せてワークを搬送する搬送装置において、ハンドと支持テーブル間に信号線を配することなくハンドに配置したセンサ類へ常時通電する搬送装置を提供する。
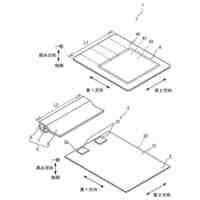
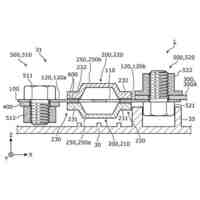
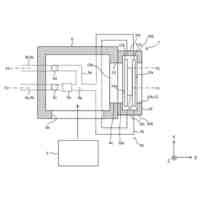
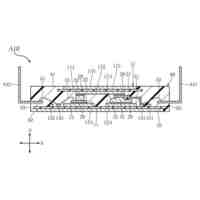
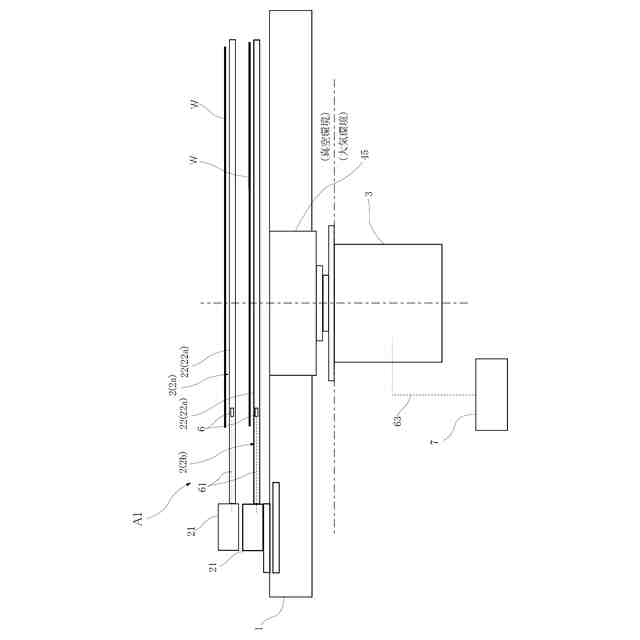
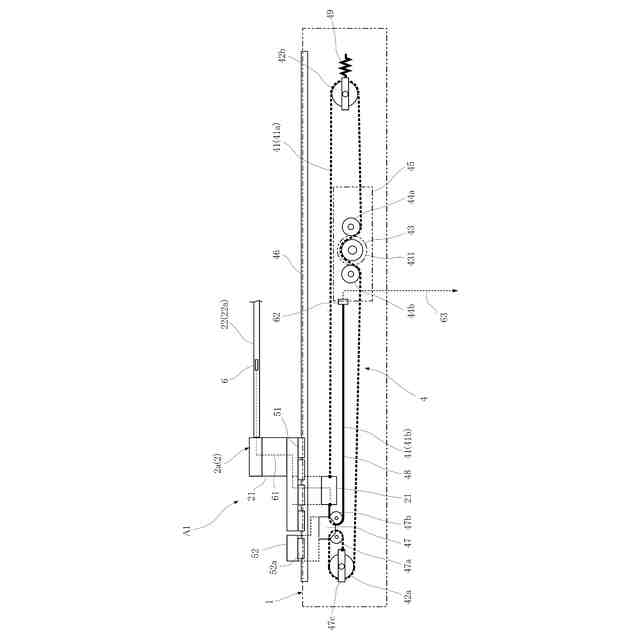
【解決手段】支持テーブル1と、当該支持テーブル1に設けられたガイドレール46と、当該ガイドレール46により水平直線方向に進退移動可能に案内され、ワークを載置可能なハンド2と、支持テーブルに設けられてハンドを進退駆動するベルト駆動機構4と、を備え、真空環境下に配置される搬送装置A1であって、ハンドは、ガイドレールに案内されたハンド支持体21とハンド支持体に支持されたハンド体22を含み、ハンドにはセンサ6が設けられ、ベルト駆動機構4を構成するベルト41の少なくとも一部41bは、ハンド支持体の内部に配された信号線61を介してセンサに導通し、給電及び信号伝達が可能な通電性ベルトで構成される。
【選択図】図2
特許請求の範囲
【請求項1】
支持テーブルと、当該支持テーブルに設けられたガイドレールと、当該ガイドレールにより水平直線方向に進退移動可能に案内され、ワークを載置可能なハンドと、上記支持テーブルに設けられて上記ハンドを進退駆動するベルト駆動機構と、を備え、真空環境下に配置される搬送装置であって、
上記ハンドは、上記ガイドレールに案内されたハンド支持体と当該ハンド支持体に支持されたハンド体を含んでおり、
上記ハンドにはセンサが設けられており、
上記ベルト駆動機構を構成するベルトの少なくとも一部は、上記センサに導通し、給電および信号伝達が可能な通電性ベルトで構成されていることを特徴とする、搬送装置。
続きを表示(約 730 文字)
【請求項2】
上記ベルト駆動機構は、
駆動プーリと、
上記ハンドの移動行程の一端側と他端側とに設けられた第1従動プーリおよび第2従動プーリと、
上記移動行程に沿って並び、上記第1従動プーリ側に位置する第1滑車および上記第2従動プーリ側に位置する第2滑車を支持し、上記移動行程に沿って移動可能な滑車支持体と、
一端が上記ハンド支持体に連結されるとともに上記第2従動プーリ、上記駆動プーリ、上記第1従動プーリおよび上記第1滑車に順に掛け回され、他端が上記支持テーブルまたはこれと一体的な部材に連結された第1ベルトと、
一端が上記ハンド体に連結されるとともに上記第2滑車に掛け回され、他端が上記支持テーブルまたはこれと一体的な部材に固定された第2ベルトと、
を含み、
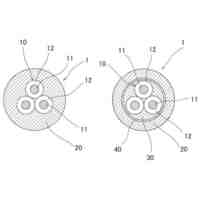
上記第1ベルトおよび上記第2ベルトの少なくとも一方は上記通電性ベルトで形成されており、
上記通電性ベルトで形成された上記第1ベルトまたは上記第2ベルトは、上記ハンド支持体に連結される一端が上記センサに導通させられているとともに、他端が外部制御部に導通させられている、請求項1に記載の搬送装置。
【請求項3】
上記滑車支持体は、上記ガイドレールに案内されて上記移動行程に沿って移動可能である、請求項2に記載の搬送装置。
【請求項4】
上記ハンドは、互いに独立して進退移動可能で上下に並ぶ上位ハンドと下位ハンドとからなる、請求項1ないし3のいずれかに記載の搬送装置。
【請求項5】
上記センサは、上記ハンド上の物体の存否を検出するためのセンサである、請求項1に記載の搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送装置に関し、より詳しくは、FPD(フラットパネルディスプレイ)用ガラス基板等のワークを直線状に搬送することができる搬送装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
この種の搬送装置の一例として、特許文献1に記載されたものがある。同文献に記載された搬送装置は、支持テーブルに設けたリニアガイド機構により、ハンドを水平直線方向に移動可能に支持し、ハンドをベルト駆動機構により進退駆動するように構成されている。支持テーブルは通常、昇降および旋回が可能となっている。
【0003】
この種の搬送装置は、真空かつ高温環境下において、ワークを前工程の処理室から受け取り、次工程の処理室へ搬入するといった搬送を行う等のために用いられる。この場合、ハンドにワークが載せられているべき時点において、ワークが正しくハンドに載せられているか否かを確認することが、ワークに対する一連の工程を円滑に行う上で重要である。
【0004】
特許文献1に記載された搬送装置においては、ハンドに近接センサ等のセンサを配置する構成を採用しているが、真空環境に晒されるハンドにセンサを配置し、信号線を介して大気環境下にある制御部に信号を導く構成をとる場合、ハンドと支持テーブル間に長尺かつハンドの移動により屈曲状態が変化する信号線を配する必要があり、安定的な作動を保障するには、種々の困難を伴う。特許文献1に記載された搬送装置においては、ハンドが最も後退した原点位置(ホームポジション)とハンドが最も前進した進出位置でのみハンド側の接点と支持テーブル側の接点がつながり、センサへの通電がなされるように構成している。これにより特許文献1に記載された搬送装置は往復移動するハンドと支持テーブル間に配する信号線を省略することができるが、ハンドが原点位置と進出位置にあるときのみハンド上の板状ワークの存否を確認できるにすぎない。また、真空環境下での接点間接離を繰り返すことによるパーティクル発生が避けられず、搬送装置が設置されるシステムの安定した作動が阻害されかねない問題が依然として残る。
【先行技術文献】
【特許文献】
【0005】
特開2014-65092号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、上記した事情のもとで考え出されたものであって、真空環境下で支持テーブル上を直線方向に進退動させられるハンドに載せてワークを搬送する搬送装置において、ハンドと支持テーブル間に信号線を配することなくハンドに配置したセンサへの常時通電を可能としつつ、安定した作動状態を保持することができるように構成することをその課題としている。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明では、次の技術的手段を採用した。
【0008】
本発明により提供される搬送装置は、支持テーブルと、当該支持テーブルに設けられたガイドレールと、当該ガイドレールにより水平直線方向に進退移動可能に案内され、ワークを載置可能なハンドと、上記支持テーブルに設けられて上記ハンドを進退駆動するベルト駆動機構と、を備え、真空環境下に設置される搬送装置であって、上記ハンドは、上記ガイドレールに案内されたハンド支持体と当該ハンド支持体に支持されたハンド体を含んでおり、上記ハンドにはセンサが設けられており、上記ベルト駆動機構を構成するベルトの少なくとも一部は、上記センサに導通し、給電および信号伝達が可能な通電性ベルトで構成されている。
【0009】
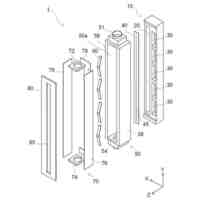
好ましい実施の形態では、上記ベルト駆動機構は、駆動プーリと、上記ハンドの移動行程の一端側と他端側とに設けられた第1従動プーリおよび第2従動プーリと、上記移動行程に沿って並び、上記第1従動プーリ側に位置する第1滑車および上記第2従動プーリ側に位置する第2滑車を支持し、上記移動行程に沿って移動可能な滑車支持体と、一端が上記ハンド支持体に連結されるとともに上記第2従動プーリ、上記駆動プーリ、上記第1従動プーリおよび上記第1滑車に順に掛け回され、他端が上記支持テーブルまたはこれと一体的な部材に連結された第1ベルトと、一端が上記ハンド体に連結されるとともに上記第2滑車に掛け回され、他端が上記支持テーブルまたはこれと一体的な部材に固定された第2ベルトと、を含み、上記第1ベルトおよび上記第2ベルトの少なくとも一方は上記通電性ベルトで形成されており、上記通電性ベルトで形成された上記第1ベルトまたは上記第2ベルトは、上記ハンド支持体に連結される一端が上記センサに導通させられているとともに、他端が外部制御部に導通させられている。
【0010】
好ましい実施の形態では、上記滑車支持体は、上記ガイドレールに案内されて上記移動行程に沿って移動可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイヘン
溶接装置
3日前
株式会社ダイヘン
電極交換装置
25日前
株式会社ダイヘン
パルスアーク溶接制御方法
9日前
株式会社ダイヘン
パルスアーク溶接制御方法
17日前
株式会社ダイヘン
パルスアーク溶接制御方法
17日前
株式会社ダイヘン
制御回路、および、三相力率改善装置
2日前
株式会社ダイヘン
フラットパネル製造システム及びそれに用いられるロボット制御装置
1日前
東ソー株式会社
絶縁電線
1か月前
APB株式会社
蓄電セル
1か月前
マクセル株式会社
電源装置
1か月前
ローム株式会社
半導体装置
1か月前
株式会社東芝
端子台
1か月前
日新イオン機器株式会社
イオン源
1か月前
株式会社GSユアサ
蓄電装置
23日前
富士電機株式会社
電磁接触器
9日前
太陽誘電株式会社
コイル部品
1か月前
株式会社ホロン
冷陰極電子源
1か月前
株式会社GSユアサ
蓄電装置
9日前
株式会社GSユアサ
蓄電設備
1か月前
株式会社GSユアサ
蓄電設備
1か月前
三菱電機株式会社
回路遮断器
17日前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
大電株式会社
電線又はケーブル
1日前
日本特殊陶業株式会社
保持装置
1か月前
トヨタ自動車株式会社
バッテリ
1か月前
日本特殊陶業株式会社
保持装置
22日前
トヨタ自動車株式会社
冷却構造
1か月前
北道電設株式会社
配電具カバー
1か月前
トヨタ自動車株式会社
蓄電装置
1か月前
ホシデン株式会社
複合コネクタ
3日前
日新イオン機器株式会社
基板処理装置
1か月前
トヨタ自動車株式会社
蓄電装置
1日前
矢崎総業株式会社
コネクタ
9日前
ローム株式会社
半導体装置
1か月前
日亜化学工業株式会社
半導体レーザ素子
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ