TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025144029
公報種別
公開特許公報(A)
公開日
2025-10-02
出願番号
2024043591
出願日
2024-03-19
発明の名称
ロボットシステム
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
13/00 20060101AFI20250925BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業者の手間を削減することができるロボットシステムを提供する。
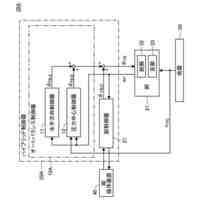
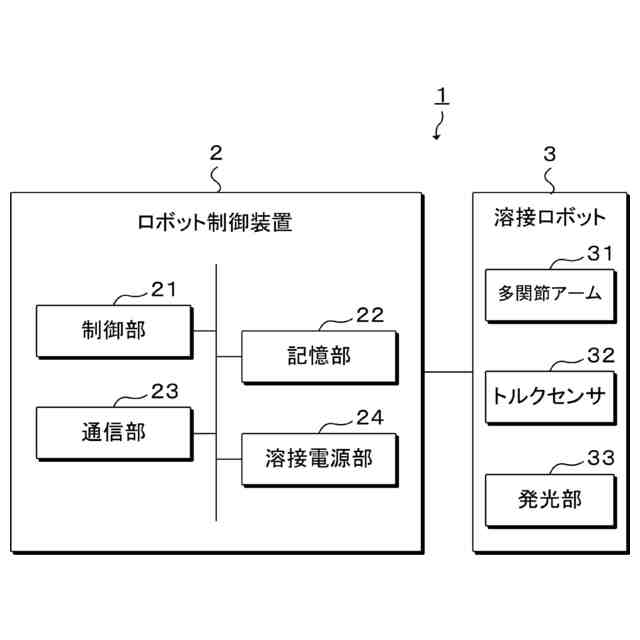
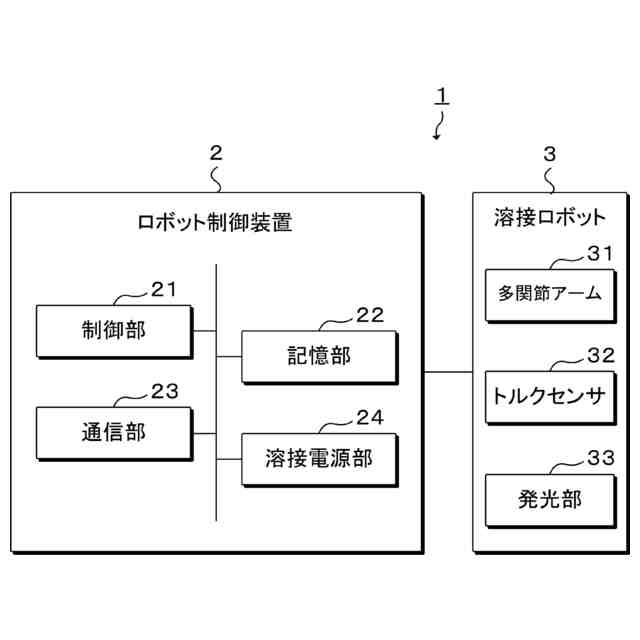
【解決手段】ロボットシステム1は、多関節アーム31と、多関節アーム31を構成する軸を駆動するモータの出力側に設けられ、多関節アームに加わる外力を計測するトルクセンサ32と、光を発光する発光部33と、トルクセンサ32により計測された外力の大きさによって異なる光を、発光部33から発光させる発光制御部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
多関節アームと、
前記多関節アームを構成する軸を駆動するモータの出力側に設けられ、前記多関節アームに加わる外力を計測するトルクセンサと、
前記トルクセンサにより計測された前記外力の大きさに応じた内容を出力部から出力させる出力制御部と、
を備えるロボットシステム。
続きを表示(約 490 文字)
【請求項2】
前記出力制御部は、前記外力の大きさが、複数設けられたいずれかの閾値を超えると、超えた閾値に対応する内容を前記出力部から出力させる、
請求項1記載のロボットシステム。
【請求項3】
前記出力制御部は、前記外力の大きさを積算した値が、複数設けられたいずれかの積算値用閾値を超えると、超えた積算値用閾値に対応する内容を前記出力部からさらに出力させる、
請求項1記載のロボットシステム。
【請求項4】
前記出力部は、光を発光する発光部であり、
前記発光部は、前記多関節アームを構成する軸ごとに設けられ、
前記出力制御部は、前記トルクセンサにより計測された前記外力の大きさによって異なる光を、前記発光部から発光させる、
請求項1記載のロボットシステム。
【請求項5】
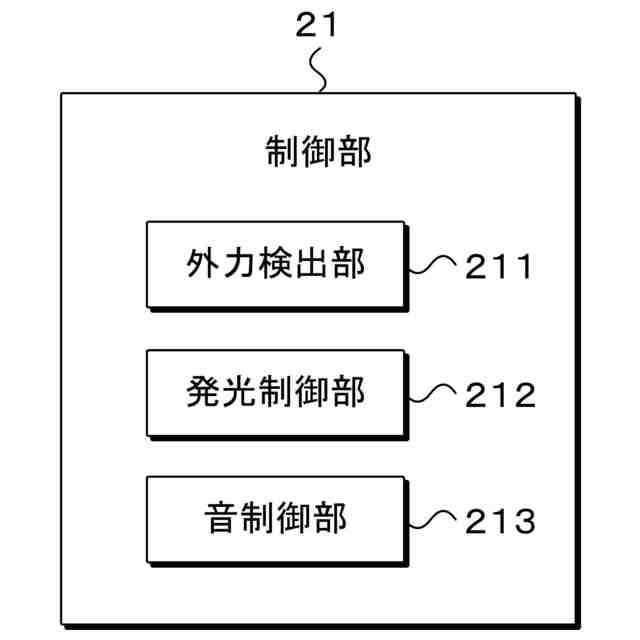
前記出力部は、音を出力する音出力部であり、
前記出力制御部は、前記トルクセンサにより計測された前記外力の大きさによって異なる音を、前記音出力部から出力させる、
請求項1記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステムに関する。
続きを表示(約 980 文字)
【背景技術】
【0002】
下記特許文献1には、多関節ロボットが障害物等に衝突した際に、ロボット等に与える機械的ダメージを最小限に抑えるためのロボット停止方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-137312号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の方法では、障害物等への衝突を検知した際に、ロボットを停止することはできるが、その衝突により、ロボットがどの程度のダメージを受けたのかを判別することはできない。したがって、衝突が検知された後に、作業者は、ロボットの状態を調べる必要があるため、手間がかかる。
【0005】
そこで、本発明は、作業者の手間を削減することができるロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
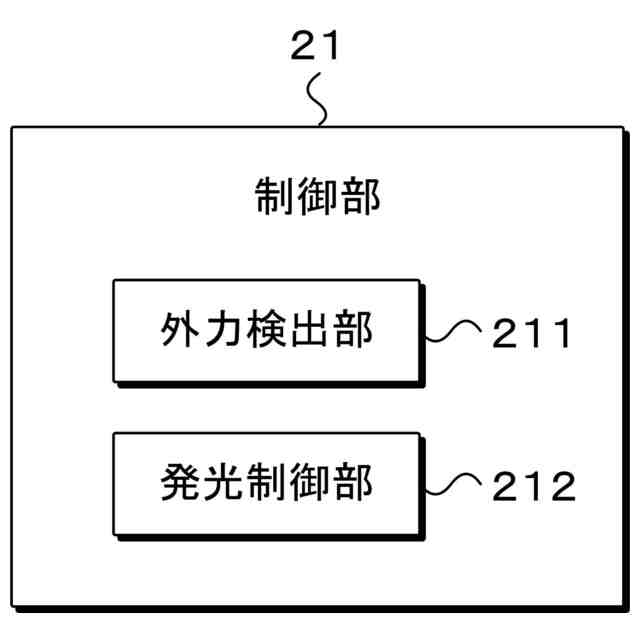
本発明の一態様に係るロボットシステムは、多関節アームと、多関節アームを構成する軸を駆動するモータの出力側に設けられ、多関節アームに加わる外力を計測するトルクセンサと、トルクセンサにより計測された外力の大きさに応じた内容を、出力部から出力させる発光制御部と、を備える。
【0007】
この態様によれば、作業者は、多関節アームに外力が加わったときなどに出力される内容を確認することで、多関節アームにどの程度の外力が加わったのかを把握することが可能となる。
【0008】
上記態様において、出力制御部は、外力の大きさが、複数設けられたいずれかの閾値を超えると、超えた閾値に対応する内容を、出力部から出力させてもよい。
【0009】
この態様によれば、作業者は、出力部から出力されたときに、閾値ごとに設定されている内容に基づいて、多関節アームにどの程度の外力が加わったのかを把握することが可能となる。
【0010】
上記態様において、出力制御部は、外力の大きさを積算した値が、複数設けられたいずれかの積算値用閾値を超えると、超えた積算値用閾値に対応する内容を、出力部からさらに出力させてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
17日前
トヨタ自動車株式会社
学習装置
2日前
株式会社マキタ
ハンマドリル
26日前
株式会社マキタ
ハンマドリル
26日前
工機ホールディングス株式会社
作業機
1か月前
株式会社安川電機
ロボット
23日前
川崎重工業株式会社
塗装システム
1か月前
株式会社三共コーポレーション
工具保持具
17日前
株式会社不二越
垂直多関節ロボット
2日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボットハンド
23日前
株式会社マキタ
現場用作業機
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社マキタ
作業機
29日前
株式会社マキタ
電動工具
2日前
学校法人立命館
ロボットハンド制御システム
1か月前
ニデックインスツルメンツ株式会社
産業用ロボット
15日前
トヨタ自動車株式会社
モバイルマニピュレータ
1か月前
株式会社田村製作所
エンドエフェクタ及びロボット装置
15日前
株式会社人機一体
有脚ロボット
25日前
ファナック株式会社
経路データセット生成
25日前
株式会社ケイズベルテック
物品定量取り分け装置
26日前
積水ハウス株式会社
固定ピン保持用アタッチメント
23日前
株式会社マキタ
インパクト工具
1か月前
カツデン株式会社
回転工具用治具
1か月前
パナソニック株式会社
工具及びカバー
1か月前
泰芳機械股分有限公司
コレット収納装置
1か月前
株式会社デンソー
ワーク投入装置
15日前
日本発條株式会社
ケーブルユニット及びその製造方法
15日前
株式会社秦製作所
ジャック差込口ナット締め用の供回り防止レンチ
3日前
久維科技(蘇州)有限公司
締結部材打込み機
1か月前
ニデックインスツルメンツ株式会社
搬送システム
1か月前
SMC株式会社
チャック装置およびチャックシステム
23日前
パナソニック株式会社
インパクト回転工具
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ