TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025171813
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024077511
出願日
2024-05-10
発明の名称
インパクト回転工具
出願人
パナソニック株式会社
代理人
弁理士法人北斗特許事務所
主分類
B25B
21/02 20060101AFI20251113BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】本開示は、トルクを高精度に求めることを目的とする。
【解決手段】第2永久磁石は、ロータ32の外部に設けられている。センサユニットは、第2永久磁石から発生する磁気に応じた第2検出信号を出力する第2磁気検出素子と、第2パルス信号を第2検出信号に基づいて生成する第2パルス生成部と、を含む。トルク演算部は、第2演算部で第2パルス信号のパルス数に基づいて算出されたロータ32の角速度と、インパクト動作の時間間隔と、に基づいて出力軸45のトルクを算出する。ロータ32が1回転するときの第2パルス信号のパルス数は、ロータ32が1回転するときの第1パルス信号のパルス数よりも多い。
【選択図】図2
特許請求の範囲
【請求項1】
ステータと、複数の第1永久磁石を有するロータと、を含むモータと、
先端工具を保持するように構成された出力軸と、
前記モータから得た動力を用いて前記出力軸に回転打撃力を加えるインパクト動作を行うインパクト機構と、
前記インパクト機構の前記インパクト動作を検出する打撃検出部と、
前記複数の第1永久磁石から発生する磁気に応じた第1検出信号を出力する第1磁気検出素子と、
前記ロータの回転角に応じた間隔でパルスを有する第1パルス信号を前記第1検出信号に基づいて生成する第1パルス生成部と、
前記第1パルス信号のパルス数に基づいて前記ロータの角速度を算出する第1演算部と、
前記第1演算部で算出された前記ロータの前記角速度に基づいて前記ロータの前記回転角を制御する回転角制御部と、
前記ロータの外部に設けられた第2永久磁石と、
前記第2永久磁石から発生する磁気に応じた第2検出信号を出力する第2磁気検出素子と、前記ロータの前記回転角に応じた間隔でパルスを有する第2パルス信号を前記第2検出信号に基づいて生成する第2パルス生成部と、を含むセンサユニットと、
前記第2パルス信号のパルス数に基づいて前記ロータの前記角速度を算出する第2演算部と、
前記第2演算部で算出された前記ロータの前記角速度と、前記打撃検出部で検出された前記インパクト動作の時間間隔と、に基づいて前記出力軸のトルクを算出するトルク演算部と、
前記トルク演算部で算出された前記出力軸の前記トルクに基づいて前記ロータを停止させる停止制御部と、を備え、
前記ロータが1回転するときの前記第2パルス信号のパルス数は、前記ロータが1回転するときの前記第1パルス信号のパルス数よりも多い、
インパクト回転工具。
続きを表示(約 830 文字)
【請求項2】
前記停止制御部は、前記出力軸の前記トルクが目標トルク以上となってから、前記打撃検出部で前記インパクト動作が検出された回数が目標回数以上となると、前記ロータを停止させる、
請求項1に記載のインパクト回転工具。
【請求項3】
前記インパクト回転工具は、前記ステータと前記センサユニットとの間に配置された金属製の放熱板を更に備える、
請求項1に記載のインパクト回転工具。
【請求項4】
前記モータは、前記ロータに固定されており前記ロータと共に回転する駆動軸を更に含み、
前記第2永久磁石は、前記駆動軸に固定されている、
請求項1に記載のインパクト回転工具。
【請求項5】
前記インパクト回転工具は、ハウジングを更に備え、
前記ハウジングは、
前記モータ及び前記インパクト機構を収容しており、先端から前記出力軸が突出した筒状部と、
前記筒状部から突出している突出部と、を有し、
前記センサユニットは、前記筒状部の内部であって、前記モータから見て前記インパクト機構が配置された側とは反対側に配置されている、
請求項1に記載のインパクト回転工具。
【請求項6】
前記第2パルス生成部と前記モータとの間の距離は、前記トルク演算部と前記モータとの間の距離よりも短い、
請求項1に記載のインパクト回転工具。
【請求項7】
前記インパクト回転工具は、前記モータ及び前記センサユニットを収容するハウジングを更に備え、
前記ハウジングは、吸気口と、排気口と、を有し、
前記モータは、前記吸気口と前記排気口との間の通風路に配置されており、
前記センサユニットは、前記モータから見て前記排気口が設けられた側とは反対側に配置されている、
請求項1に記載のインパクト回転工具。
発明の詳細な説明
【技術分野】
【0001】
本開示は一般にインパクト回転工具に関し、より詳細には、トルクに基づいて制御されるモータを備えるインパクト回転工具に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1に記載のインパクト回転工具は、回転駆動部と、演算手段と、制御手段とを備える。回転駆動部は、駆動軸を介してハンマーを回転させる。演算手段は、打撃動作から締付トルクを算出する。制御手段は、演算手段で算出した締付トルクが締付トルク値以上となる時に回転駆動部を停止させる。
【先行技術文献】
【特許文献】
【0003】
特開2005-324265号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のインパクト回転工具は、例えば、ねじ締めに用いられるインパクトドライバである。特許文献1に記載のインパクト回転工具では、ねじが着座する等によってモータの負荷が大きくなると、締付トルクを精度良く算出することが困難となる可能性がある。
【0005】
本開示は、トルク(締付トルク)を高精度に求めることができるインパクト回転工具を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係るインパクト回転工具は、モータと、出力軸と、インパクト機構と、打撃検出部と、第1磁気検出素子と、第1パルス生成部と、第1演算部と、回転角制御部と、第2永久磁石と、センサユニットと、第2演算部と、トルク演算部と、停止制御部と、を備える。前記モータは、ステータと、複数の第1永久磁石を有するロータと、を含む。前記出力軸は、先端工具を保持するように構成されている。前記インパクト機構は、前記モータから得た動力を用いてインパクト動作を行う。前記インパクト動作は、前記出力軸に回転打撃力を加える動作である。前記打撃検出部は、前記インパクト機構の前記インパクト動作を検出する。前記第1磁気検出素子は、前記複数の第1永久磁石から発生する磁気に応じた第1検出信号を出力する。前記第1パルス生成部は、第1パルス信号を前記第1検出信号に基づいて生成する。前記第1パルス信号は、前記ロータの回転角に応じた間隔でパルスを有する。前記第1演算部は、前記第1パルス信号のパルス数に基づいて前記ロータの角速度を算出する。前記回転角制御部は、前記第1演算部で算出された前記ロータの前記角速度に基づいて前記ロータの前記回転角を制御する。前記第2永久磁石は、前記ロータの外部に設けられている。前記センサユニットは、前記第2永久磁石から発生する磁気に応じた第2検出信号を出力する第2磁気検出素子と、前記ロータの前記回転角に応じた間隔でパルスを有する第2パルス信号を前記第2検出信号に基づいて生成する第2パルス生成部と、を含む。前記第2演算部は、前記第2パルス信号のパルス数に基づいて前記ロータの前記角速度を算出する。前記トルク演算部は、前記第2演算部で算出された前記ロータの前記角速度と、前記打撃検出部で検出された前記インパクト動作の時間間隔と、に基づいて前記出力軸のトルクを算出する。前記停止制御部は、前記トルク演算部で算出された前記出力軸の前記トルクに基づいて前記ロータを停止させる。前記ロータが1回転するときの前記第2パルス信号のパルス数は、前記ロータが1回転するときの前記第1パルス信号のパルス数よりも多い。
【発明の効果】
【0007】
本開示には、トルクを高精度に求めることができるという利点がある。
【図面の簡単な説明】
【0008】
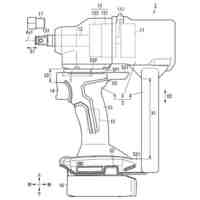
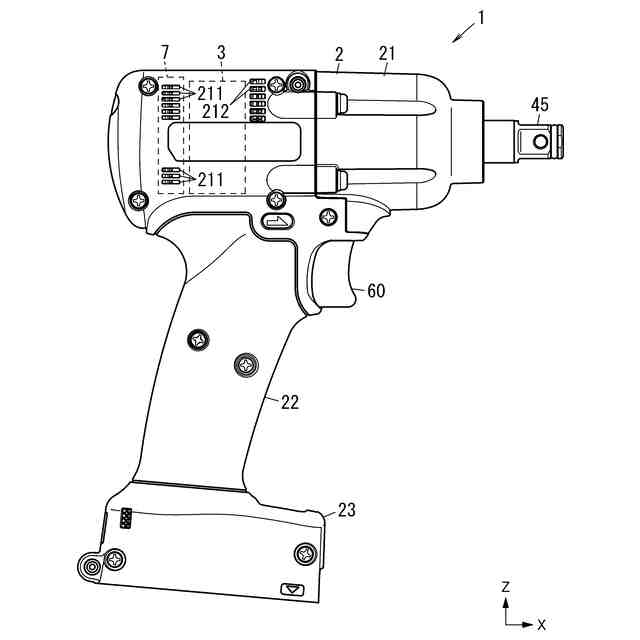
図1は、一実施形態に係るインパクト回転工具の側面図である。
図2は、同上のインパクト回転工具の側断面図である。
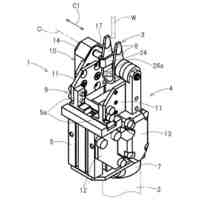
図3は、同上のインパクト回転工具の要部の分解斜視図である。
図4は、同上のインパクト回転工具の要部の側面図である。
図5は、同上のインパクト回転工具の要部の斜視図である。
図6は、同上のインパクト回転工具の要部の斜視図である。
図7は、同上のインパクト回転工具の一部の構成を表すブロック図である。
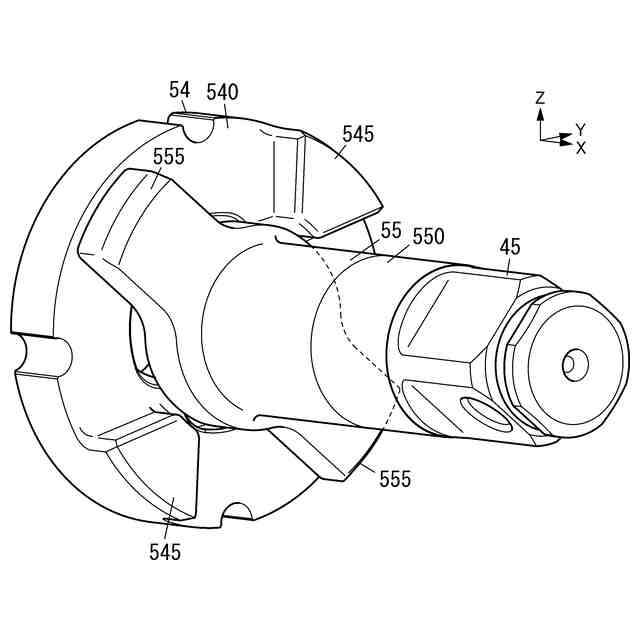
図8は、同上のインパクト回転工具の要部の斜視図である。
【発明を実施するための形態】
【0009】
(実施形態)
以下、実施形態に係るインパクト回転工具1について、図面を用いて説明する。ただし、下記の実施形態は、本開示の様々な実施形態の1つに過ぎない。下記の実施形態は、本開示の目的を達成できれば、設計等に応じて種々の変更が可能である。また、下記の実施形態において説明する各図は、模式的な図であり、図中の各構成要素の大きさ及び厚さそれぞれの比が必ずしも実際の寸法比を反映しているとは限らない。
【0010】
各図においてX軸方向を前後方向、Y軸方向を左右方向、Z軸方向を上下方向と規定する。さらに、X軸方向の正の向きを前、Y軸方向の正の向きを右、Z軸方向の正の向きを上と規定する。ただし、これらの方向は一例であり、インパクト回転工具1の使用時の方向を限定する趣旨ではない。また、図面中の各方向を示す矢印は説明のために表記しているに過ぎず、実体を伴わない。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
CKD株式会社
把持装置
6日前
トヨタ自動車株式会社
学習装置
21日前
川崎重工業株式会社
ハンド
2か月前
ダイセイ株式会社
ロボット自動刻印装置
6日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
瓜生製作株式会社
電動締付工具
14日前
トヨタ自動車株式会社
ロボット
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
2か月前
トヨタ自動車株式会社
軌道生成装置
2か月前
株式会社やまびこ
電動作業機
今日
株式会社不二越
垂直多関節ロボット
21日前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社マキタ
集塵アタッチメント
13日前
新電元工業株式会社
インピーダンス制御装置
今日
工機ホールディングス株式会社
作業機
2か月前
トヨタ自動車株式会社
ロボットハンド
1か月前
株式会社マキタ
回転打撃工具
2か月前
株式会社マキタ
現場用作業機
1か月前
川崎重工業株式会社
ワーク搬送ロボット
2か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
住友重機械工業株式会社
ロボット教示装置
1日前
パナソニック株式会社
工具
今日
山九株式会社
レンチ保持治具
2か月前
ニデックインスツルメンツ株式会社
産業用ロボット
1か月前
株式会社マキタ
電動工具
21日前
NTN株式会社
把持装置
6日前
株式会社マキタ
作業機
1か月前
学校法人立命館
ロボットハンド制御システム
1か月前
株式会社マキタ
電動作業機
1日前
東レエンジニアリング株式会社
ツール動作機構
2か月前
トヨタ自動車株式会社
モバイルマニピュレータ
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ