TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025158091
公報種別
公開特許公報(A)
公開日
2025-10-16
出願番号
2025057021
出願日
2025-03-28
発明の名称
締結部材打込み機
出願人
久維科技(蘇州)有限公司
代理人
フェリシテ弁理士法人
主分類
B25C
1/06 20060101AFI20251008BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】安定して円滑に動作する締結部材打込み機を提供する。
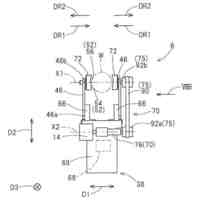
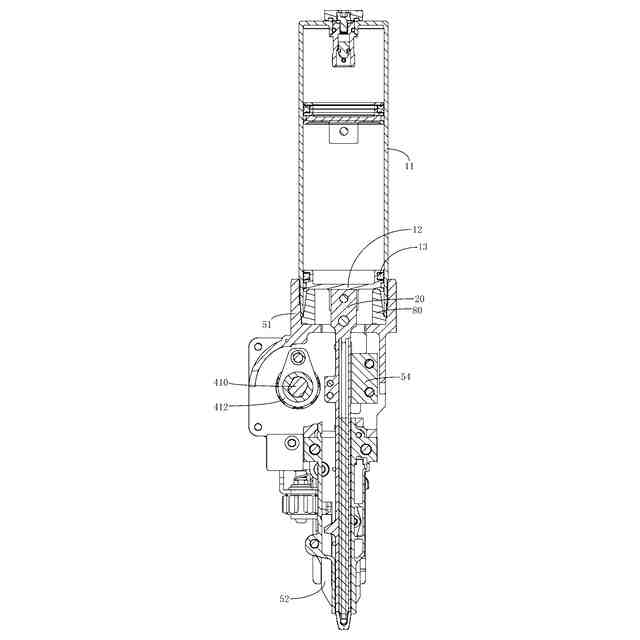
【解決手段】衝撃ユニットは初期位置、第1移行位置、第2移行位置、及び蓄エネルギー位置を有し、推進ユニットは第1移行位置に対応する第1位置及び第2移行位置に対応する第2位置を有する。初期位置では、衝撃ユニットと推進ユニットは非結合状態にあり、第1移行位置で衝撃ユニットと推進ユニットは結合し、第2移行位置では結合を解除する。衝撃ユニットが初期位置にあるとき、駆動ユニットは衝撃ユニットと結合して衝撃ユニットを駆動し、衝撃ユニットが所定の距離を移動した後、駆動ユニットは推進ユニットと結合して推進ユニットを駆動し、推進ユニットは第1位置で衝撃ユニットと結合し、衝撃ユニットを第1移行位置から第2移行位置へ移動させ、復帰ユニットは、推進ユニットが第2位置から第1位置へ移動する復帰力を提供する。
【選択図】図1
特許請求の範囲
【請求項1】
蓄エネルギーユニットは、打撃エネルギーを蓄えるためのものであり、
衝撃ユニットは、前記蓄エネルギーユニットのエネルギーを受け取り、締結部材を第1方向に沿って工件に打ち込むためのものであり、
前記衝撃ユニットは、第1方向の逆向きに配置された初期位置、第1移行位置、第2移行位置及び蓄エネルギー位置を有し、
推進ユニットは、前記衝撃ユニットを駆動するためのものであり、
前記推進ユニットは、前記第1移行位置に対応する第1位置及び前記第2移行位置に対応する第2位置を有し、
駆動ユニットは、前記推進ユニット及び前記衝撃ユニットに動力を供給するものであり、
復帰ユニットは、前記推進ユニットを前記第2位置から前記第1位置に戻すための復帰力を提供し、
前記初期位置では、前記衝撃ユニットと前記推進ユニットとが噛み合っておらず、
前記第1移行位置では、前記衝撃ユニットと前記推進ユニットとが噛み合い、
前記第2移行位置では、前記衝撃ユニットと前記推進ユニットとの噛み合いが解除されており、
前記衝撃ユニットが前記初期位置にあるとき、前記駆動ユニットが前記衝撃ユニットと噛み合い、前記衝撃ユニットを駆動し、前記衝撃ユニットが所定の距離を移動した後、前記駆動ユニットが前記推進ユニットと噛み合い、前記推進ユニットを駆動し、前記推進ユニットが前記第1位置で前記衝撃ユニットと噛み合い、前記衝撃ユニットを前記第1移行位置から前記第2移行位置に移動させることを特徴とする締結部材打込み機。
続きを表示(約 2,100 文字)
【請求項2】
前記衝撃ユニットは、前記第2移行位置に達した後、前記駆動ユニットは、前記衝撃ユニットを前記第2移行位置から前記蓄エネルギー位置に移動させる、請求項1に記載の締結部材打込み機。
【請求項3】
前記締結部材打込み機は、さらに支持ユニットを含み、
前記支持ユニットは、前記蓄エネルギーユニット、前記衝撃ユニット、前記推進ユニット及び前記駆動ユニットを支持し、
前記復帰ユニットは、反対方向に配置された第1端と第2端とを有しており、
前記第1端は、前記支持ユニットに接続され、
前記第2端は、前記推進ユニットに接続されている、請求項1に記載の締結部材打込み機。
【請求項4】
前記駆動ユニットは、モーター及び駆動機構を含み、
前記モーターは、前記駆動機構に動力を供給し、
前記駆動機構は、駆動輪を含み、
前記駆動輪は、円周に沿って設けられた噛み合い領域及び非噛み合い領域を有しており、
前記噛み合い領域は、前記推進ユニットの歯と噛み合い、噛み合い状態を形成する、請求項1に記載の締結部材打込み機。
【請求項5】
前記衝撃ユニットは、第1突起部及び第2突起部を含み、
前記駆動機構は、第1噛み合い構造及び第2噛み合い構造を含み、
前記第1噛み合い構造は、前記第1突起部と噛み合って、前記衝撃ユニットを前記初期位置から前記第1移行位置に移動させ、
前記第2噛み合い構造は、前記第2突起部と噛み合って、前記衝撃ユニットを前記第2移行位置から前記蓄エネルギー位置に移動させ、
前記第2突起部が前記第2噛み合い構造と噛み合いが解消された状態の時、前記衝撃ユニットが前記蓄エネルギーユニットから放出される打撃エネルギーの作用下で前記締結部材をワークに打ち込む,請求項4に記載の締結部材打込み機。
【請求項6】
前記駆動ユニットは、駆動機構を含み、
前記駆動機構は、駆動輪を含み、
前記推進ユニットは、第2方向に沿って前記駆動輪と対向して配置されており、
前記推進ユニットは、噛み合い歯領域を含み、
前記第2方向において、前記復帰ユニットが前記噛み合い歯領域の前記駆動輪とは反対側に配置されており、
前記第2方向は、前記第1方向に対して垂直である、請求項1に記載の締結部材打込み機。
【請求項7】
前記復帰ユニットは、前記衝撃ユニットと第3方向に沿って配置されており、
前記第3方向は、前記第1方向及び前記第2方向に対して垂直である、請求項6に記載の締結部材打込み機。
【請求項8】
前記推進ユニットは、凹槽を含み、
前記凹槽は、前記第1方向の反対方向に向かって開いており、
前記衝撃ユニットは、前記凹槽と噛み合う凸起を含み、
前記推進ユニットは、前記第1位置から前記第2位置に移動する過程において、前記凸起が前記凹槽内にあり、前記衝撃ユニットが前記推進ユニットによって前記第1方向の反対方向に押される、請求項1に記載の締結部材打込み機。
【請求項9】
前記締結部材打込み機は、さらに緩衝部を含み、
前記推進ユニットは、前記復帰ユニットの作用を受けて復帰した後、前記緩衝部に接触する、請求項1に記載の締結部材打込み機。
【請求項10】
蓄エネルギーユニットは、打撃エネルギーを蓄えるためのものであり、
衝撃ユニットは、前記蓄エネルギーユニットのエネルギーを受け取り、締結部材を第1方向に沿って工件に打ち込むためのものであり、
前記衝撃ユニットは、第1方向の逆向きに配置された初期位置、第1移行位置、第2移行位置及び蓄エネルギー位置を有し、
推進ユニットは、前記衝撃ユニットを駆動するためのものであり、
前記推進ユニットは、前記第1移行位置に対応する第1位置及び前記第2移行位置に対応する第2位置を有し、
駆動ユニットは、前記推進ユニット及び前記衝撃ユニットに動力を供給するものであり、
復帰ユニットは、前記推進ユニットを前記第2位置から前記第1位置に戻すための復帰力を提供し、
前記初期位置では、前記衝撃ユニットと前記推進ユニットとが噛み合っておらず、
前記第1移行位置では、前記衝撃ユニットと前記推進ユニットとが噛み合い、
前記第2移行位置では、前記衝撃ユニットと前記推進ユニットとの噛み合いが解除されており、
前記衝撃ユニットは、前記初期位置にあるとき、前記駆動ユニットが前記衝撃ユニット及び前記推進ユニットを同時に駆動し、前記推進ユニットが前記第1位置で前記衝撃ユニットと噛み合い、前記衝撃ユニットを前記第1移行位置から前記第2移行位置に移動させることを特徴とする締結部材打込み機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動工具分野に関し、特に締結部材打込み機に関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
一般的に、締結部材打込み機は、蓄エネルギー装置、駆動装置、及び衝撃装置を含み、衝撃装置は、蓄エネルギー装置から解放されるエネルギーの作用により第1方向に移動し、締結部材を被加工物に打ち込む。駆動装置には、複数の第1噛み合い歯が含まれ、衝撃装置には、複数の第2噛み合い歯が含まれており、締結部材打込み機が作動する際、駆動装置の複数の第1噛み合い歯が順次衝撃装置の複数の第2噛み合い歯と噛み合い、駆動装置が衝撃装置を第2方向に移動させて、蓄エネルギー装置がエネルギーを蓄える。このとき、第2方向は、第1方向とは逆方向である。締結部材打込み機が打込み動作を行う際、釘詰まりが発生することがあり、釘詰まりの際、衝撃装置が駆動装置と正しく噛み合う位置に停まらない場合があり、それにより締結部材打込み機が正常に動作できなくなることがある。
【0003】
そのため、新たな締結部材打込み機を提供する必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、安定して円滑に動作する締結部材打込み機を提供する。
【課題を解決するための手段】
【0005】
初め、本発明は、以下のような締結部材打込み機を提供する。
【0006】
蓄エネルギーユニットは、打撃エネルギーを蓄えるためのものであり、
衝撃ユニットは、前記蓄エネルギーユニットのエネルギーを受け取り、締結部材を第1方向に沿って工件に打ち込むためのものであり、前記衝撃ユニットは、第1方向の逆向きに配置された初期位置、第1移行位置、第2移行位置及び蓄エネルギー位置を有し、
推進ユニットは、前記衝撃ユニットを駆動するためのものであり、前記推進ユニットは第1移行位置に対応する第1位置及び第2移行位置に対応する第2位置を有し、
駆動ユニットは、前記推進ユニット及び前記衝撃ユニットに動力を供給するものであり、
復帰ユニットは、前記推進ユニットを第2位置から第1位置に戻すための復帰力を提供し、
初期位置では、前記衝撃ユニットと前記推進ユニットは、噛み合っておらず、第1移行位置では、前記衝撃ユニットと前記推進ユニットは噛み合い、第2移行位置では、前記衝撃ユニットと前記推進ユニットは噛み合いが解除されており、
前記衝撃ユニットは、初期位置にあるとき、前記駆動ユニットは、前記衝撃ユニットと噛み合い、前記衝撃ユニットを駆動し、前記衝撃ユニットは、所定の距離を移動した後、前記駆動ユニットは、前記推進ユニットと噛み合い、前記推進ユニットを駆動し、前記推進ユニットは、前記第1位置で前記衝撃ユニットと噛み合い、前記衝撃ユニットを前記第1移行位置から前記第2移行位置に移動させることを特徴とする締結部材打込み機。
【0007】
第2に、本発明は、以下のような構成を持つ締結部材打込み機も提供する。
【0008】
蓄エネルギーユニットは、打撃エネルギーを蓄えるためのものであり、
衝撃ユニットは、前記蓄エネルギーユニットのエネルギーを受け取り、締結部材を第1方向に沿って工件に打ち込むためのものであり、前記衝撃ユニットは、第1方向の逆向きに配置された初期位置、第1移行位置、第2移行位置及び蓄エネルギー位置を有し、
推進ユニットは、前記衝撃ユニットを駆動するためのものであり、前記推進ユニットは第1移行位置に対応する第1位置及び第2移行位置に対応する第2位置を有し、
駆動ユニットは、前記推進ユニット及び前記衝撃ユニットに動力を供給するものであり、
復帰ユニットは、前記推進ユニットを第2位置から第1位置に戻すための復帰力を提供し、
初期位置では、前記衝撃ユニットと前記推進ユニットは、噛み合っておらず、第1移行位置では、前記衝撃ユニットと前記推進ユニットは噛み合い、第2移行位置では、前記衝撃ユニットと前記推進ユニットは噛み合いが解除されており、
前記衝撃ユニットは、初期位置にあるとき、前記駆動ユニットは、前記衝撃ユニット及び前記推進ユニットを同時に駆動し、前記推進ユニットは、前記第1位置で前記衝撃ユニットと噛み合い、前記衝撃ユニットを第1移行位置から第2移行位置に移動させることを特徴とする締結部材打込み機。
【0009】
さらに、本発明は、以下のような構成を持つ締結部材打込み機も提供する。
【0010】
蓄エネルギーユニットは、打撃エネルギーを蓄えるためのものであり、
衝撃ユニットは、前記蓄エネルギーユニットのエネルギーを受け取り、締結部材を第1方向に沿って工件に打ち込むものであって、前記衝撃ユニットは、第1方向の反対方向に配置された初期位置、第1移行位置、第2移行位置及び蓄エネルギー位置を有しており、
推進ユニットは、前記衝撃ユニットを駆動するものであって、前記推進ユニットは、起始位置、前記第1移行位置に対応する第1位置及び前記第2移行位置に対応する第2位置を有しており、
駆動ユニットは、前記推進ユニット及び前記衝撃ユニットに動力を供給するものであり、
復帰ユニットは、前記推進ユニットを第2位置から第1位置に戻すための復帰力を提供し、
初期位置では、前記衝撃ユニットと前記推進ユニットは噛み合っておらず、第1移行位置では、前記衝撃ユニットと前記推進ユニットは噛み合い、第2移行位置では、前記衝撃ユニットと前記推進ユニットは噛み合いが解除され、
前記駆動ユニットは、同時に前記推進ユニット及び前記衝撃ユニットを駆動するように構成されており、前記推進ユニットは、起始位置から第1位置に移動する過程において、前記推進ユニットは、前記衝撃ユニットに追いつき、第1位置に到達した後、前記推進ユニットと前記衝撃ユニットが噛み合い、前記推進ユニットは、前記衝撃ユニットを第1移行位置から第2移行位置に移動させる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
22日前
川崎重工業株式会社
ロボット
1か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
学習装置
7日前
株式会社竹中工務店
補助セット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
移動ロボットシステム
1か月前
トヨタ自動車株式会社
ロボット
1か月前
瓜生製作株式会社
電動締付工具
今日
本田技研工業株式会社
装置
2か月前
株式会社不二越
エッジ仕上げ装置
2か月前
株式会社安川電機
ロボット
28日前
川崎重工業株式会社
塗装システム
1か月前
株式会社不二越
垂直多関節ロボット
7日前
株式会社不二越
垂直多関節ロボット
2か月前
株式会社三共コーポレーション
工具保持具
22日前
トヨタ自動車株式会社
軌道生成装置
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボットハンド
28日前
アネックスツール株式会社
ドライバービット
1か月前
ライオン株式会社
移載システム
2か月前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
ワールド技研株式会社
ロボットセル装置
1か月前
株式会社マキタ
現場用作業機
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社マキタ
回転打撃工具
1か月前
山九株式会社
レンチ保持治具
1か月前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
2か月前
NTN株式会社
ハンド
1か月前
セイコーエプソン株式会社
ロボット
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ