TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025075506
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023186726
出願日
2023-10-31
発明の名称
端末装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250508BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの稼働率を低下させずに、作業プログラムを作成することができる端末装置を提供する。
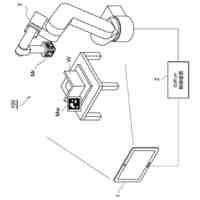
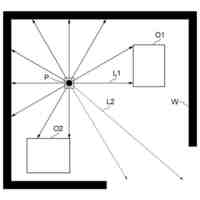
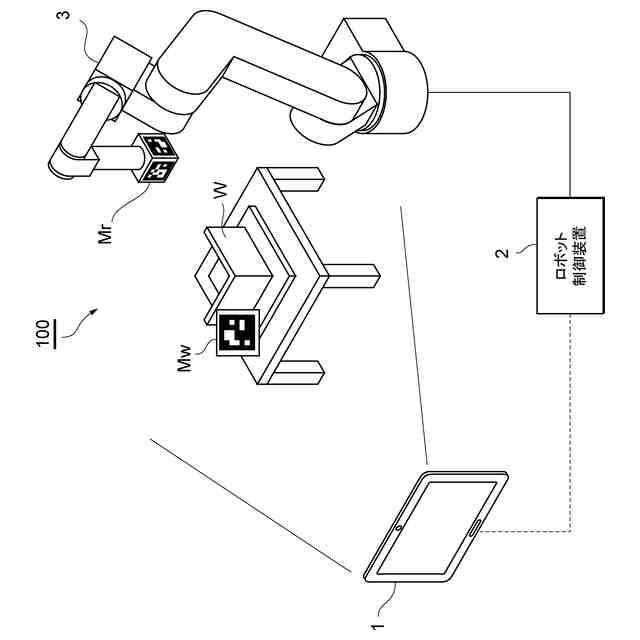
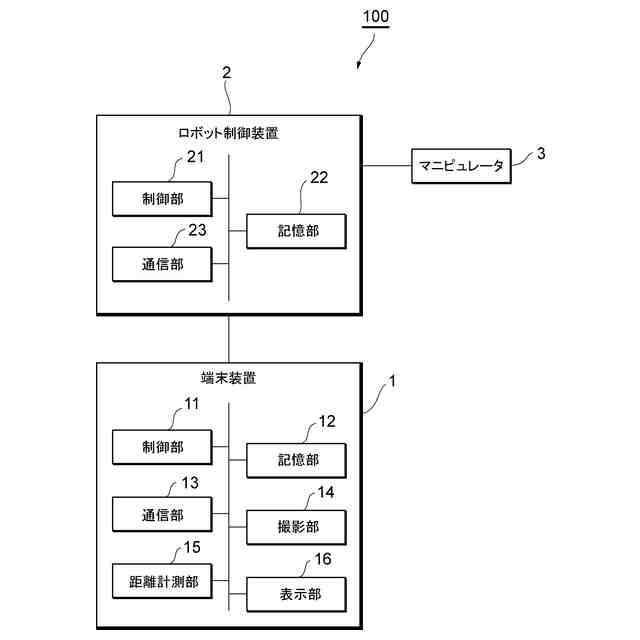
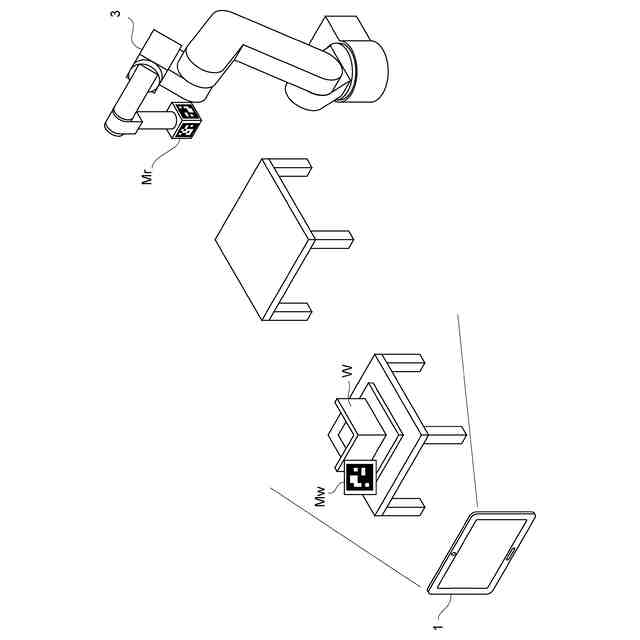
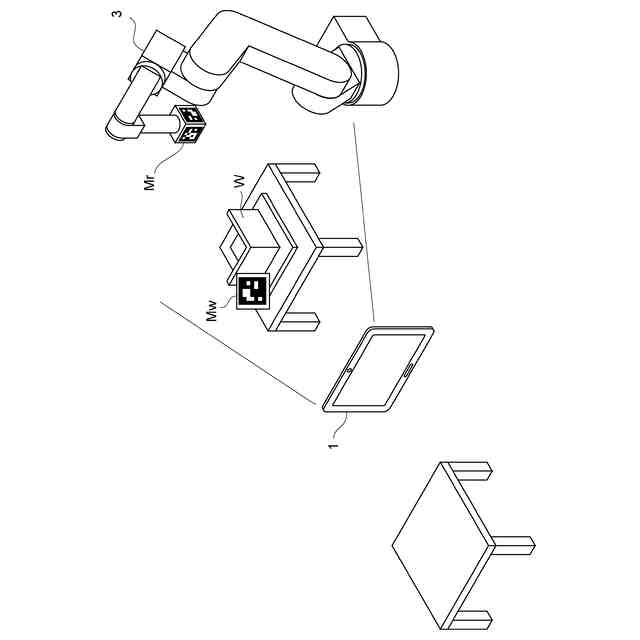
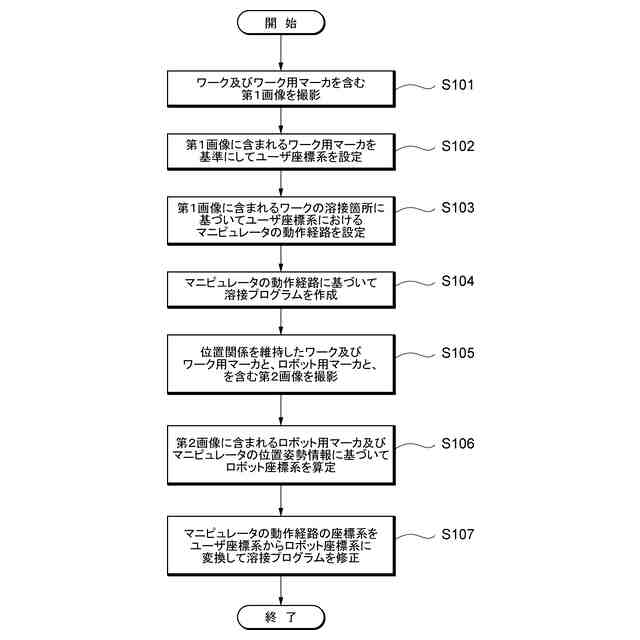
【解決手段】端末装置1は、作業対象及び作業対象用マーカを含む第1画像を撮影し、第1画像に含まれる作業対象用マーカを基準にしてユーザ座標系を設定し、第1画像に含まれる作業対象の作業箇所に基づいてユーザ座標系の産業用ロボットの動作経路を設定し、設定した産業用ロボットの動作経路に基づいて産業用ロボットを動作させる作業プログラムを作成し、第1画像での位置関係を維持した作業対象及び作業対象用マーカと産業用ロボットに取り付けたロボット用マーカとを含む第2画像を撮影し、第2画像に含まれるロボット用マーカ及び産業用ロボットの位置姿勢情報に基づいてロボット座標系を算定し、産業用ロボットの動作経路をユーザ座標系からロボット座標系に変換して作業プログラムを修正する。
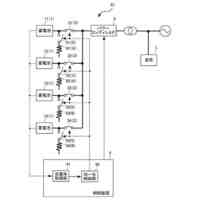
【選択図】図1
特許請求の範囲
【請求項1】
作業対象及び作業対象用マーカを含む第1画像を撮影する第1撮影部と、
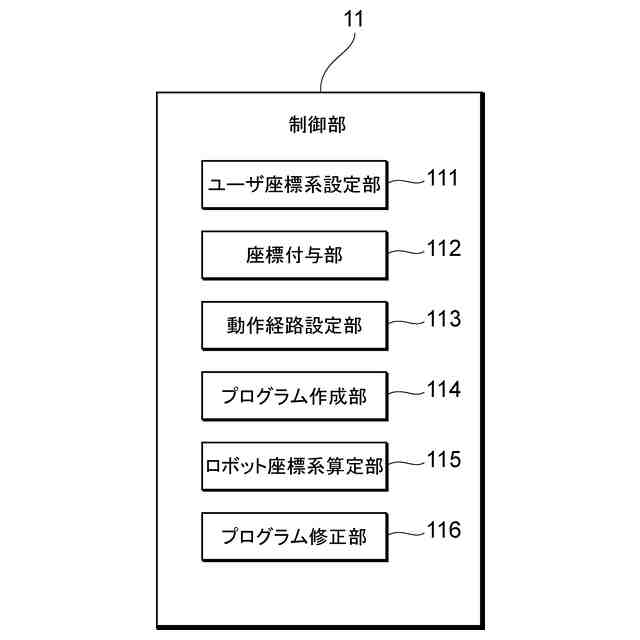
前記第1画像に含まれる前記作業対象用マーカを基準にしてユーザ座標系を設定するユーザ座標系設定部と、
前記第1画像に含まれる前記作業対象の作業箇所に基づいて、前記ユーザ座標系における産業用ロボットの動作経路を設定する動作経路設定部と、
設定された前記産業用ロボットの動作経路に基づいて、前記産業用ロボットを動作させるための作業プログラムを作成するプログラム作成部と、
前記第1画像での位置関係を維持した前記作業対象及び前記作業対象用マーカに加え、前記産業用ロボットに取り付けられたロボット用マーカを含む第2画像を撮影する第2撮影部と、
前記第2画像に含まれる前記ロボット用マーカ及び前記産業用ロボットの位置姿勢情報に基づいてロボット座標系を算定するロボット座標系算定部と、
前記産業用ロボットの動作経路の座標系を前記ユーザ座標系から前記ロボット座標系に変換し、前記作業プログラムを修正するプログラム修正部と、
を備える端末装置。
続きを表示(約 390 文字)
【請求項2】
前記プログラム修正部は、前記ユーザ座標系の原点と前記ロボット座標系の原点との差分に基づいて、前記産業用ロボットの動作経路の座標系を変換する、
請求項1記載の端末装置。
【請求項3】
前記ユーザ座標系設定部は、前記作業対象用マーカを基準にして前記ユーザ座標系の原点及び座標軸を算定する、
請求項1記載の端末装置。
【請求項4】
前記ロボット座標系算定部は、前記ロボット用マーカ及び前記産業用ロボットの位置姿勢情報に基づいて前記ロボット座標系の原点及び座標軸を算定する、
請求項1記載の端末装置。
【請求項5】
前記産業用ロボットの位置姿勢情報は、前記産業用ロボットの動作を制御するロボット制御装置から取得される前記産業用ロボットの各軸の角度情報を含む、
請求項1記載の端末装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットの作業プログラムを作成可能な端末装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、ロボットを動作させるためのプログラムを作成する際に、カメラで撮影されている画像を用いて作成する技術がある。例えば、特許文献1の技術では、カメラで撮影されているマーカが取り付けられたロボットと溶接対象とを含む画像を用いて、ロボットを動作させるためのプログラムを作成している。特許文献2の技術では、カメラで撮影されているロボットを含む実空間の画像に、ロボットのエフェクタなどの仮想画像を重畳して、ロボットを動作させるためのプログラムを作成している。
【先行技術文献】
【特許文献】
【0003】
特許第7190552号公報
特許第6420229号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1や特許文献2の技術では、プログラムを作成する際に、ロボットを含めた画像を撮影する必要がある。したがって、プログラムを作成している間、ロボットが占有されることになり、ロボットの稼働率が低下してしまう。
【0005】
そこで、本発明は、ロボットの稼働率を低下させずに、作業プログラムを作成することができる端末装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る端末装置は、作業対象及び作業対象用マーカを含む第1画像を撮影する第1撮影部と、第1画像に含まれる作業対象用マーカを基準にしてユーザ座標系を設定するユーザ座標系設定部と、第1画像に含まれる作業対象の作業箇所に基づいて、ユーザ座標系における産業用ロボットの動作経路を設定する動作経路設定部と、設定された産業用ロボットの動作経路に基づいて、産業用ロボットを動作させるための作業プログラムを作成するプログラム作成部と、第1画像での位置関係を維持した作業対象及び作業対象用マーカに加え、産業用ロボットに取り付けられたロボット用マーカを含む第2画像を撮影する第2撮影部と、第2画像に含まれるロボット用マーカ及び産業用ロボットの位置姿勢情報に基づいてロボット座標系を算定するロボット座標系算定部と、産業用ロボットの動作経路の座標系をユーザ座標系からロボット座標系に変換し、作業プログラムを修正するプログラム修正部と、を備える。
【0007】
この態様によれば、作業対象及び作業対象用マーカを含む第1画像を撮影することで、作業対象用マーカを基準にしたユーザ座標系を設定し、作業対象の作業箇所に基づいて設定したユーザ座標系における産業用ロボットの動作経路に基づいて、産業用ロボットの作業プログラムを作成することができる。そして、第1画像での位置関係を維持した作業対象及び作業対象用マーカと産業用ロボットに取り付けられたロボット用マーカとを含む第2画像を撮影することで、ロボット用マーカ及び産業用ロボットの位置姿勢情報に基づくロボット座標系を算定し、産業用ロボットの動作経路の座標系をユーザ座標系からロボット座標系に変換して作業プログラムを修正することが可能となる。
【0008】
これにより、産業用ロボットを含まない第1画像に基づいて、ユーザ座標系での産業用ロボットの作業プログラムを作成しておき、その後に撮影される産業用ロボットに取り付けられたロボット用マーカを加えた第2画像に基づいて、産業用ロボットの動作経路を表す座標系をユーザ座標系からロボット座標系に変換し、ユーザ座標系に基づく作業プログラムをロボット座標系に基づく作業プログラムに修正することができる。
【0009】
上記態様において、プログラム修正部は、ユーザ座標系の原点とロボット座標系の原点との差分に基づいて、産業用ロボットの動作経路の座標系を変換してもよい。
【0010】
この態様によれば、ユーザ座標系の原点とロボット座標系の原点との差分に基づいて、産業用ロボットの動作経路の座標系を変換することが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
移動体
6日前
株式会社ダイヘン
搬送車
21日前
株式会社ダイヘン
充電装置
16日前
株式会社ダイヘン
端末装置
21日前
株式会社ダイヘン
ヒューズ
3日前
株式会社ダイヘン
溶接装置
1か月前
株式会社ダイヘン
搬送装置
6日前
株式会社ダイヘン
電圧調整装置
16日前
株式会社ダイヘン
情報処理装置
21日前
株式会社ダイヘン
電圧調整装置
1か月前
株式会社ダイヘン
電力システム
1か月前
株式会社ダイヘン
溶接ロボット
3日前
株式会社ダイヘン
溶接ロボット
3日前
株式会社ダイヘン
溶接システム
21日前
株式会社ダイヘン
蓄電池システム
1か月前
株式会社ダイヘン
多層盛り溶接方法
1か月前
株式会社ダイヘン
無線給電システム
1か月前
株式会社ダイヘン
プラズマ処理装置
14日前
株式会社ダイヘン
金属材料の分離方法
27日前
株式会社ダイヘン
圧接装置及び圧接方法
1か月前
株式会社ダイヘン
ロボット制御システム
6日前
株式会社ダイヘン
非消耗電極アーク溶接方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
6日前
株式会社ダイヘン
移動体、及び誘導線検出装置
6日前
株式会社ダイヘン
移動体、及び誘導線検出装置
6日前
株式会社ダイヘン
2重シールドティグ溶接方法
15日前
株式会社ダイヘン
複合溶接装置及び複合溶接方法
1か月前
株式会社ダイヘン
電源装置におけるケースの取付構造
1か月前
株式会社ダイヘン
制御装置、および、蓄電池システム
1か月前
株式会社ダイヘン
搬送車及びインターロック解除方法
17日前
株式会社ダイヘン
処理装置、プログラム、及び処理方法
7日前
株式会社ダイヘン
多電極サブマージアーク溶接システム
1か月前
株式会社ダイヘン
フィルタ回路、および、電力変換装置
3日前
株式会社ダイヘン
非消耗電極アーク溶接の溶接開始方法
1か月前
株式会社ダイヘン
溶接ロボットおよびティーチングハンドル
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ