TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025083711
公報種別
公開特許公報(A)
公開日
2025-06-02
出願番号
2023197253
出願日
2023-11-21
発明の名称
溶接ロボットおよびティーチングハンドル
出願人
株式会社ダイヘン
代理人
弁理士法人平木国際特許事務所
主分類
B25J
9/22 20060101AFI20250526BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】溶接を行う作業者の動作に近い教示を多関節ロボットに教示させることは難しい。
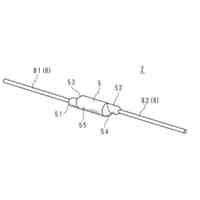
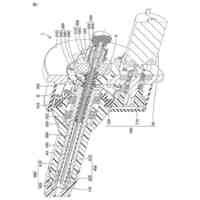
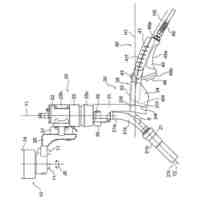
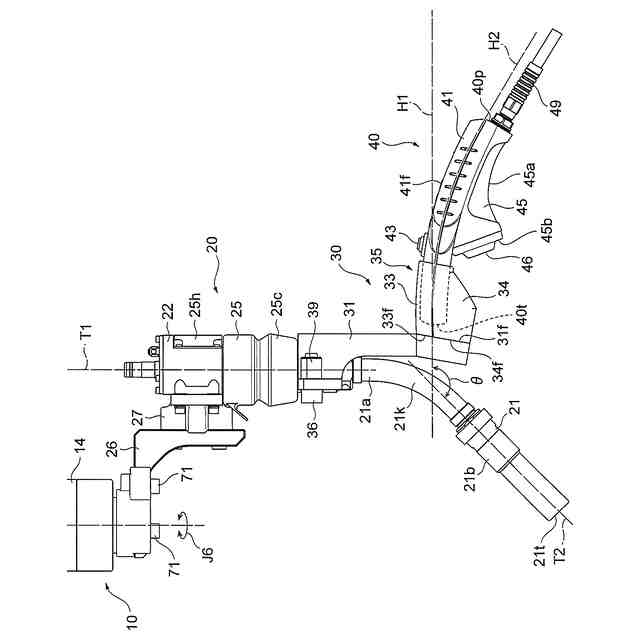
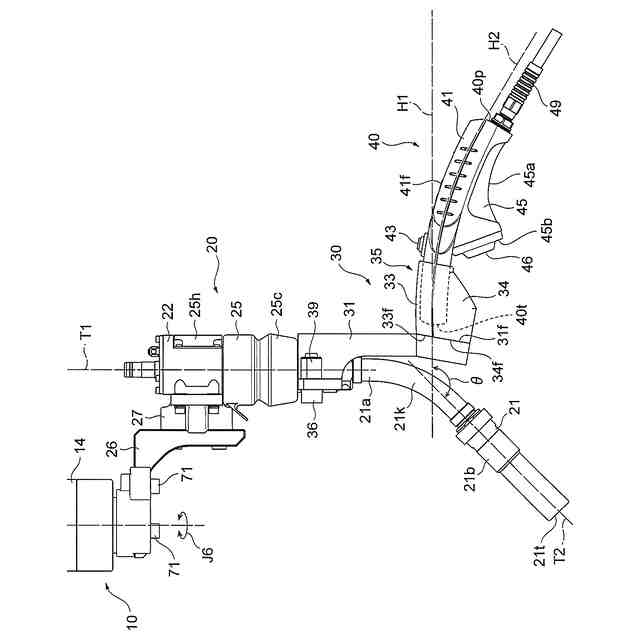
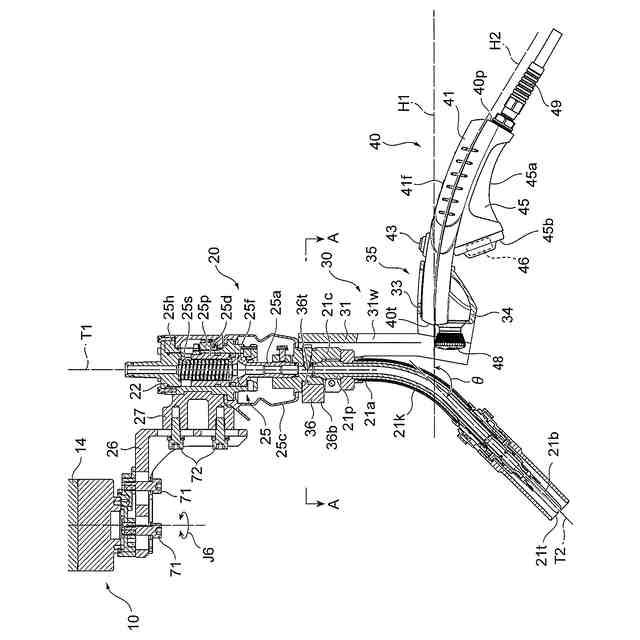
【解決手段】ティーチングハンドル40は、屈曲部21kと対向する位置に、ハンドル先端40tが配置されるように、溶接トーチ20に取り付けられている。ティーチングハンドル40は、トーチ本体21のうち、トーチ基端21pから屈曲部21kまでの第1部分21aに沿った第1トーチ仮想線T1を挟んで、屈曲部21kからトーチ先端21tまでの第2部分21bから離れる方向に延在している。トーチ本体21のうち、屈曲部21kからトーチ先端21tまでの第2部分21bに沿った第2トーチ仮想線T2と、ティーチングハンドル40がハンドル先端40tから延在する方向に沿った第1ハンドル仮想線H1とが成すハンドル取付角度θが、鈍角である。
【選択図】図4
特許請求の範囲
【請求項1】
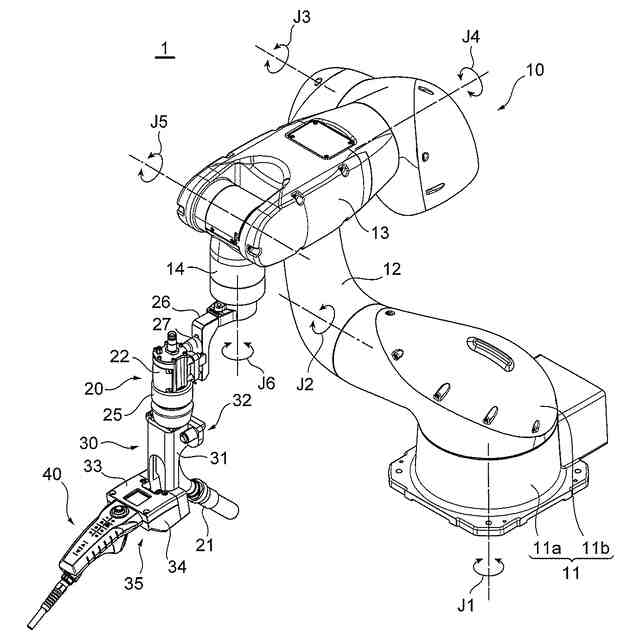
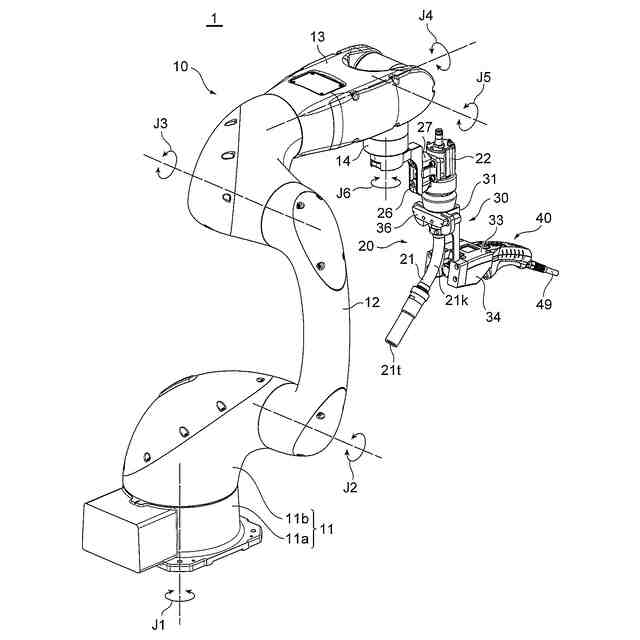
多関節のロボット本体と、前記ロボット本体の先端に取り付けられた溶接トーチと、を備えた溶接ロボットであって、
前記溶接トーチは、トーチ本体と、前記トーチ本体を前記ロボット本体の先端に連結する連結部と、を備えており、
前記トーチ本体は、前記トーチ本体のトーチ基端から前記トーチ本体のトーチ先端までの間において、前記トーチ本体を屈曲させた屈曲部を有しており、
前記溶接ロボットは、操作者により把持された状態で、操作者から前記ロボット本体の先端に付与される外力により、前記トーチ先端の移動する位置に応じた前記ロボット本体の動作を教示するティーチングハンドルをさらに備えており、
前記ティーチングハンドルは、前記屈曲部と対向する位置に、ハンドル先端が配置されるように、前記溶接トーチに取り付けられており、
前記ティーチングハンドルは、前記トーチ本体および前記ティーチングハンドルを側面視した状態で、前記トーチ本体のうち、前記トーチ基端から前記屈曲部までの第1部分に沿った第1トーチ仮想線を挟んで、前記屈曲部から前記トーチ先端までの第2部分から離れる方向に延在しており、
前記トーチ本体のうち、前記屈曲部から前記トーチ先端までの第2部分に沿った第2トーチ仮想線と、前記ティーチングハンドルが前記ハンドル先端から延在する方向に沿った第1ハンドル仮想線とが成すハンドル取付角度が、鈍角であることを特徴とする、溶接ロボット。
続きを表示(約 640 文字)
【請求項2】
前記ハンドル取付角度は、110°~140°の範囲にあることを特徴とする、請求項1に記載の溶接ロボット。
【請求項3】
前記ティーチングハンドルを側面視した状態で、前記ティーチングハンドルは、下方に湾曲していることを特徴とする、請求項1に記載の溶接ロボット。
【請求項4】
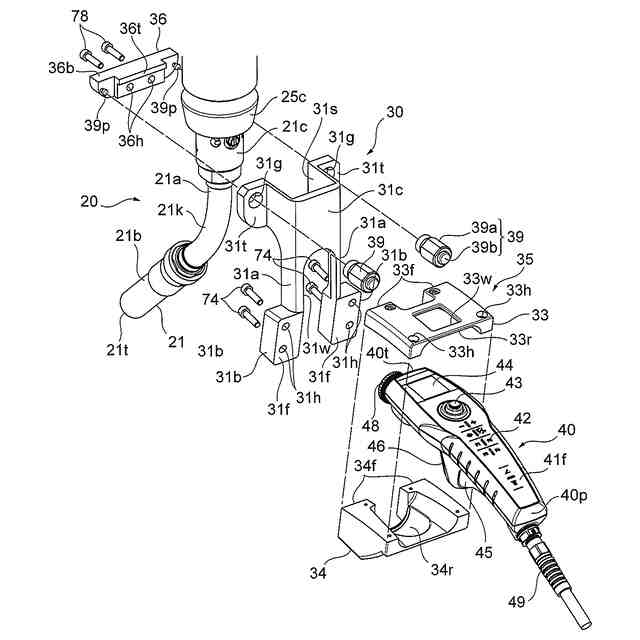
前記ティーチングハンドルは、
前記屈曲部と対向する対向位置から延在したハンドル本体と、
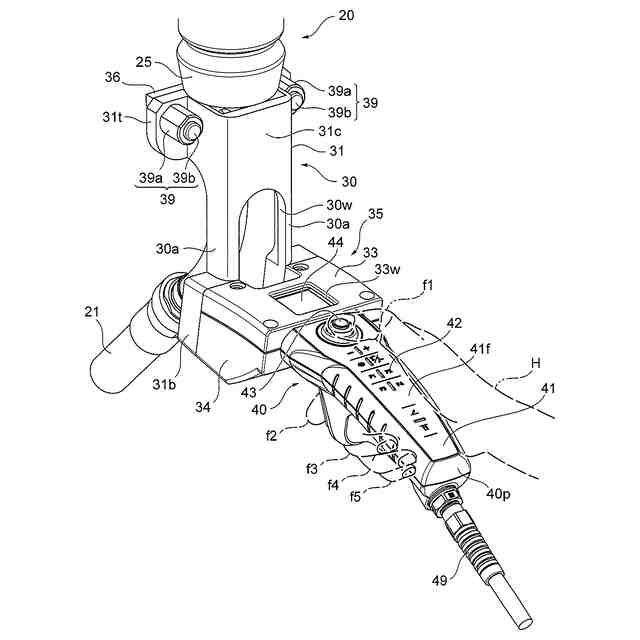
前記ハンドル本体の下部から隆起し、操作者が前記ティーチングハンドルを把持した状態で、操作者の指を掛ける指掛け用の隆起部分と、を有しており、
前記隆起部分は、ハンドル先端側からハンドル基端側に進むに従って、前記ハンドル本体からの高さが減少していることを特徴とする、請求項1に記載の溶接ロボット。
【請求項5】
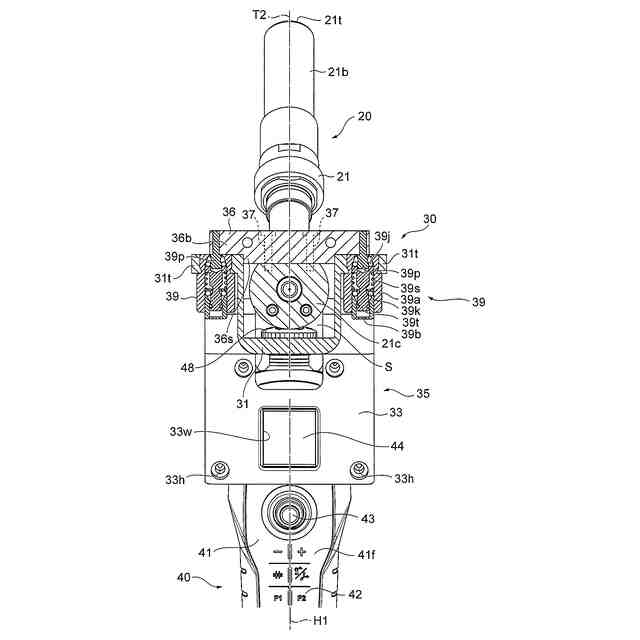
前記ティーチングハンドルには、可動が制限された前記ロボット本体に対して、前記外力により前記ロボット本体の可動を許可する操作スイッチが設けられており、
前記操作スイッチは、前記隆起部分の表面のうち、前記ハンドル先端側の端面に配置されていることを特徴とする、請求項4に記載の溶接ロボット。
【請求項6】
請求項1に記載の溶接ロボットに用いられる前記ティーチングハンドルであり、
前記ティーチングハンドルは、前記溶接トーチに、着脱自在に取り付けられていることを特徴とするティーチングハンドル。
発明の詳細な説明
【技術分野】
【0001】
本発明は、溶接ロボットおよびティーチングハンドルに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、作業者の近くで動作するように構成された人協調型ロボットが開発されている。たとえば、特許文献1には、ロボット本体の先端に、部品を把持するハンドを備えたロボットが提案されている。このロボットには、ロボット本体の先端に、ロボットの動作を教示するティーチングハンドルが取り付けられている。ティーチングハンドルは、操作者により把持された状態で、操作者からロボット本体の先端に付与される外力(操作力)により、ハンドの移動する位置に応じたロボット本体の動作を教示する際に用いられる。
【先行技術文献】
【特許文献】
【0003】
特開2015-199174号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このようなティーチングハンドルを取り付けたロボットを、溶接ロボットとして用いた場合、ティーチングハンドルは、ロボットの先端に取り付けられているため、ティーチングハンドルの位置が、溶接トーチのトーチ本体から離れている。これにより、ティーチングハンドルを用いたとしても、溶接を行う作業者の動作に近い動作をロボット本体に教示させ、溶接ロボットに溶接を精度良く行わせることは難しい。
【0005】
本発明はこのような点に鑑みてなされたものであり、その目的とするところは、溶接を行う作業者の動作に近い教示を多関節ロボットにさせることができる溶接ロボットおよびティーチングハンドルを提供することにある。
【課題を解決するための手段】
【0006】
前記課題を鑑みて、本発明に係る溶接ロボットは、多関節のロボット本体と、前記ロボット本体の先端に取り付けられた溶接トーチと、を備えた溶接ロボットであって、前記溶接トーチは、トーチ本体と、前記トーチ本体を前記ロボット本体の先端に連結する連結部と、を備えており、前記トーチ本体は、前記トーチ本体のトーチ基端から前記トーチ本体のトーチ先端までの間において、前記トーチ本体を屈曲させた屈曲部を有しており、前記溶接ロボットは、操作者により把持された状態で、操作者から前記ロボット本体の先端に付与される外力により、前記トーチ先端の移動する位置に応じた前記ロボット本体の動作を教示するティーチングハンドルをさらに備えており、前記ティーチングハンドルは、前記屈曲部と対向する位置に、ハンドル先端が配置されるように、前記溶接トーチに取り付けられており、前記ティーチングハンドルは、前記トーチ本体および前記ティーチングハンドルを側面視した状態で、前記トーチ本体のうち、前記トーチ基端から前記屈曲部までの第1部分に沿った第1トーチ仮想線を挟んで、前記屈曲部から前記トーチ先端までの第2部分から離れる方向に延在しており、前記トーチ本体のうち、前記屈曲部から前記トーチ先端までの第2部分に沿った第2トーチ仮想線と、前記ティーチングハンドルが前記ハンドル先端から延在する方向に沿った第1ハンドル仮想線とが成すハンドル取付角度が、鈍角であることを特徴とする。
【0007】
本発明によれば、操作者は、ティーチングハンドルを把持した状態で、ティーチングハンドルから、ロボット本体の先端に外力を付与し、トーチ先端の移動する位置に応じたロボット本体の動作を教示することができる。本発明では、ティーチングハンドルは、屈曲部と対向する位置に、ハンドル先端が配置されるように、溶接トーチに取り付けられ、トーチ本体が第1トーチ仮想線を挟んで、屈曲部からトーチ先端までの第2部分から離れる方向に延在している。これにより、教示作業の際には、操作者の前方にハンドル先端が位置するようにティーチングハンドルを把持し、把持したティーチングハンドルのハンドル先端を移動させることにより、トーチ本体のトーチ先端を正確かつスムーズに移動させることができる。
【0008】
第2トーチ仮想線と第1ハンドル仮想線とが成すハンドル取付角度が、鈍角であるので、ハンドルタイプの溶接トーチとハンドルとの配置状態に近いため、溶接を行う作業者の動作に近い教示をロボット本体に教示させることができる。特に、前記ハンドル取付角度が、110°~140°の範囲にあれば、このような効果をより一層期待することができる。
【0009】
より好ましい態様としては、前記ティーチングハンドルを側面視した状態で、前記ティーチングハンドルは、下方に湾曲している。
【0010】
この態様によれば、前記ティーチングハンドルは、下方に湾曲しているので、操作者は、ティーチングハンドルを把持し易く、ティーチングハンドルの操作性を向上させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
移動体
5日前
株式会社ダイヘン
移動体
25日前
株式会社ダイヘン
充電装置
5日前
株式会社ダイヘン
端末装置
1か月前
株式会社ダイヘン
搬送装置
25日前
株式会社ダイヘン
充電装置
1か月前
株式会社ダイヘン
ヒューズ
22日前
株式会社ダイヘン
溶接システム
1か月前
株式会社ダイヘン
電力システム
5日前
株式会社ダイヘン
情報処理装置
1か月前
株式会社ダイヘン
電圧調整装置
1か月前
株式会社ダイヘン
溶接ロボット
22日前
株式会社ダイヘン
溶接ロボット
22日前
株式会社ダイヘン
レーザ溶接装置
13日前
株式会社ダイヘン
プラズマ処理装置
1か月前
株式会社ダイヘン
金属材料の分離方法
1か月前
株式会社ダイヘン
負荷時タップ切換器
5日前
株式会社ダイヘン
ロボット制御システム
25日前
株式会社ダイヘン
パルスアーク溶接制御方法
7日前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
25日前
株式会社ダイヘン
移動体、及び誘導線検出装置
25日前
株式会社ダイヘン
移動体、及び誘導線検出装置
25日前
株式会社ダイヘン
2重シールドティグ溶接方法
7日前
株式会社ダイヘン
2重シールドティグ溶接方法
7日前
東北電力株式会社
電圧調整装置
6日前
株式会社ダイヘン
搬送車及びインターロック解除方法
1か月前
株式会社ダイヘン
受電装置及びワイヤレス給電システム
今日
株式会社ダイヘン
フィルタ回路、および、電力変換装置
22日前
株式会社ダイヘン
処理装置、プログラム、及び処理方法
26日前
株式会社ダイヘン
サブマージアーク溶接の溶接終了制御方法
1か月前
株式会社ダイヘン
溶接ロボットおよびティーチングハンドル
22日前
株式会社ダイヘン
双腕装置の制御装置及びロボットシステム
15日前
株式会社ダイヘン
情報処理装置及びそれを用いた機器システム
28日前
株式会社ダイヘン
安定度可視化装置及び安定度可視化プログラム
27日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ