TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025086765
公報種別
公開特許公報(A)
公開日
2025-06-09
出願番号
2023201035
出願日
2023-11-28
発明の名称
双腕装置の制御装置及びロボットシステム
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20250602BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】載置面上の対象物の姿勢を変更することができれば有用である。
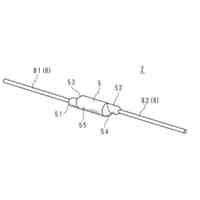
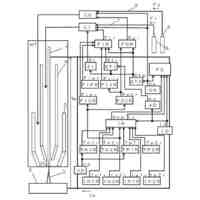
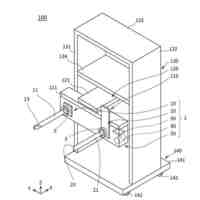
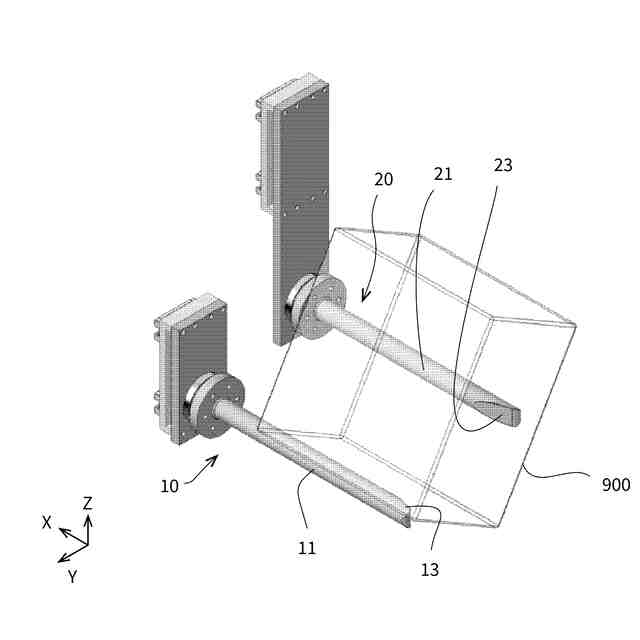
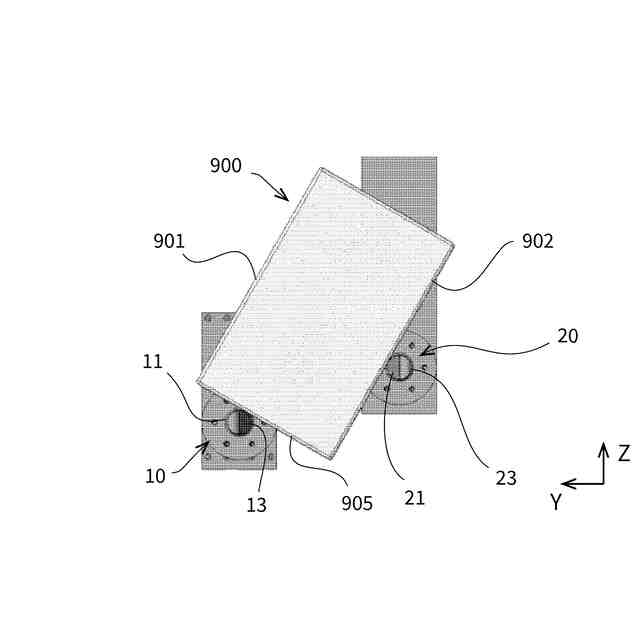
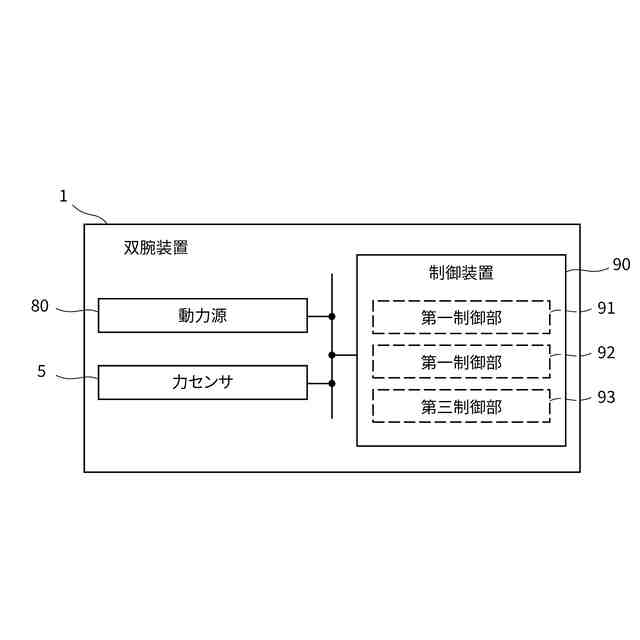
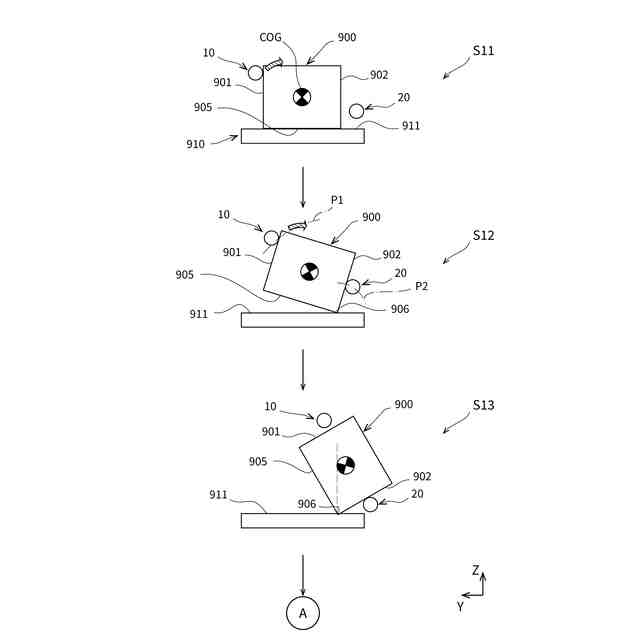
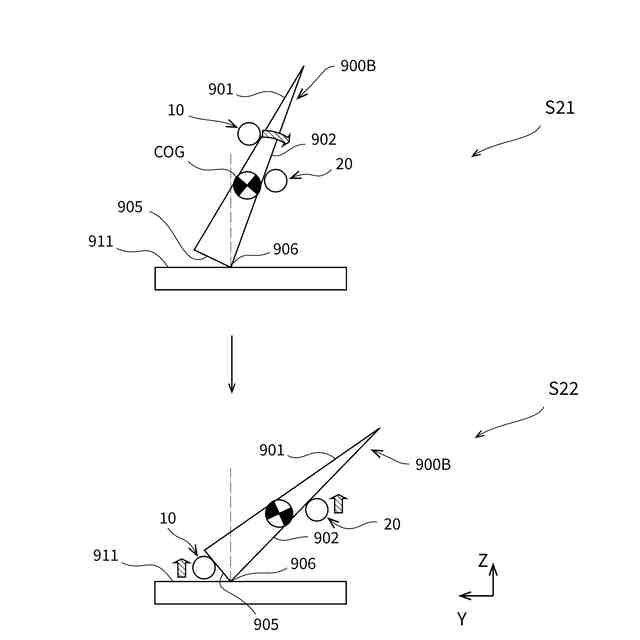
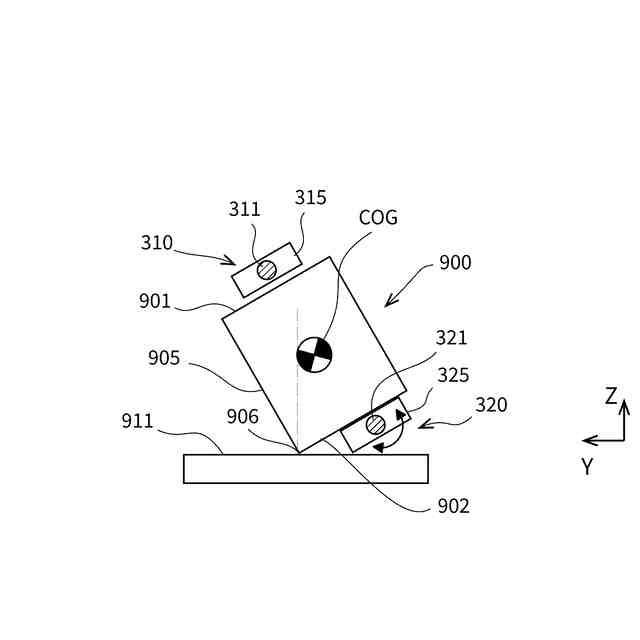
【解決手段】制御装置90は、動力源80により第一アーム10及び第二アーム20の位置を変更可能に構成されている双腕装置1の動作を制御する。制御装置90は、載置面上に底部905を接触させて配置されている箱状の対象物900を載置面911に平行な第一方向において間に挟んで並ぶように第一アーム10及び第二アーム20がそれぞれ配置されている状態で、対象物900の第一側部901に第一アーム10を接触させる第一制御部と、第一側部901に第一アーム10が接触している状態で第一アーム10を第二アーム20に近づくように移動させて対象物900が傾くように対象物900の姿勢を変化させる第二制御部とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
動力源により第一アーム及び第二アームの位置を変更可能に構成されている双腕装置の動作を制御する双腕装置の制御装置であって、
載置面上に底部を接触させて配置されている箱状の対象物を前記載置面に平行な第一方向において間に挟んで並ぶように前記第一アーム及び前記第二アームがそれぞれ配置されている状態で、前記対象物のうち前記第二アームよりも前記第一アームに近い側の第一側部に前記第一アームを接触させる第一制御部と、
前記第一側部に前記第一アームが接触している状態で第一方向において前記第一アームを前記第二アームに近づくように移動させることにより、前記対象物の前記底部のうち第一方向において前記第一アームよりも前記第二アームに近い一部が前記載置面に接触したままの状態で前記対象物が傾くように前記対象物の姿勢を変化させる第二制御部とを備える、双腕装置の制御装置。
続きを表示(約 740 文字)
【請求項2】
前記第一制御部は、前記対象物のうち前記第一アームよりも前記第二アームに近い側の第二側部に前記第二アームが接触するように又は前記第二側部の近傍に前記第二アームが位置するように、前記第二アームを配置し、
前記第二制御部は、前記第一アームの移動に伴って、前記第二側部に前記第二アームが接触したままとなるように又は前記第二側部の近傍に前記第二アームが位置するように、前記第二アームを移動させる、請求項1に記載の双腕装置の制御装置。
【請求項3】
前記第二制御部は、前記載置面に平行であって前記第一方向に直交する第二方向から見て前記第一アームの軌跡が前記載置面に接触する前記底部の一部を中心とする円弧を描くように、前記第一アームを移動させる、前記請求項1に記載の双腕装置の制御装置。
【請求項4】
前記第一アーム及び前記第二アームの少なくとも一方にかかる力を検出可能な力センサを備え、
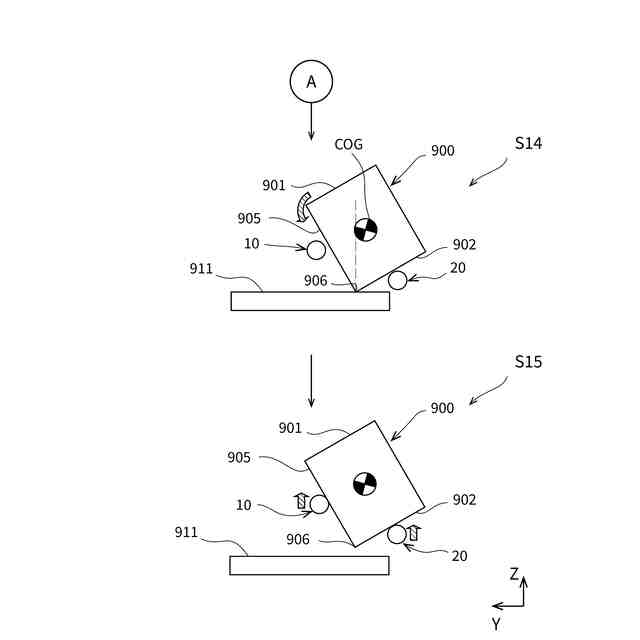
前記第二制御部は、前記力センサの検出結果が所定の停止条件を満たすと判断した場合に、前記第一アームの移動を終了させる、前記請求項1に記載の双腕装置の制御装置。
【請求項5】
前記第二制御部による前記第一アームの移動が終了した後で、前記第一アームを前記底部と前記載置面との間に移動させる第三制御部を備える、請求項4に記載の双腕装置の制御装置。
【請求項6】
動力源と前記動力源により第一アーム及び第二アームの位置を変更可能に構成されている双腕装置と、
請求項1に記載の制御装置とを備え、
載置面上に底部を接触させて配置されている箱状の対象物の姿勢を変更可能に構成されている、ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
この発明は、2つのアームを有する双腕装置の制御装置及びロボットシステムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、箱体等の対象物に対して作用させるための2つのアームを有する双腕装置を用いた装置が用いられている。このような装置には、例えば、製造現場や倉庫等において、対象物を搬送する用途などに用いられるロボットシステムや、製造ライン上の対象物を扱うロボット等の装置がある。
【0003】
下記特許文献1には、一方の縦アームから他方の縦アームに向かって出没可能な挟持爪を有し、コイルスプリングの付勢力で操作されるハンド装置が記載されている。これにより、部品箱の段積み及び段バラシが容易に行える。
【0004】
下記特許文献2には、物品を挟持するための第一爪部と第二挟持部、及びそれらを接近させる又は離す駆動装置を有し、物品間の隙間に挿入可能なロボットハンドが記載されている。これにより、隣接配置物品の容易な取り出しが可能となる。
【0005】
下記特許文献3には、荷物の上面と側面を吸着し、それらを移動する装置、そしてそれらを制御するプロセッサを有し、荷物の上面及び側面を吸着した状態で、吸着部を上方へ移動させる荷降し装置が記載されている。これにより、荷物の効率的な荷降しが可能になる。
【0006】
下記特許文献4には、並べられた複数の構造体と、それらを回動可能に連結する部材、そして固定と解除を行う部材を有し、これらを通じて構造体の伸縮を行う直動伸縮機構が記載されている。これにより、部品点数の増加を抑え、小型化及び軽量化が可能となる。
【先行技術文献】
【特許文献】
【0007】
特開2012-200806号公報
特開2020-172358号公報
特開2021-066578号公報
特開2017-057929号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
双腕装置が用いられる場面や、今後活用できるようにすることが期待されている場面には、様々なものがある。そのような様々な場面のうち、特定の1つや、複数の場面において効果的に双腕装置を活用することができれば、有用である。
【0009】
この発明は、双腕装置を有効に活用可能にする双腕装置の制御装置及びロボットシステムを提供することを目的としている。
【課題を解決するための手段】
【0010】
本第一の発明の双腕装置の制御装置は、動力源により第一アーム及び第二アームの位置を変更可能に構成されている双腕装置の動作を制御する双腕装置の制御装置であって、載置面上に底部を接触させて配置されている箱状の対象物を載置面に平行な第一方向において間に挟んで並ぶように第一アーム及び第二アームがそれぞれ配置されている状態で、対象物のうち第二アームよりも第一アームに近い側の第一側部に第一アームを接触させる第一制御部と、第一側部に第一アームが接触している状態で第一方向において第一アームを第二アームに近づくように移動させることにより、対象物の底部のうち第一方向において第一アームよりも第二アームに近い一部が載置面に接触したままの状態で対象物が傾くように対象物の姿勢を変化させる第二制御部とを備える、双腕装置の制御装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
移動体
12日前
株式会社ダイヘン
ヒューズ
29日前
株式会社ダイヘン
充電装置
12日前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
電力システム
12日前
株式会社ダイヘン
溶接ロボット
29日前
株式会社ダイヘン
溶接ロボット
29日前
株式会社ダイヘン
レーザ溶接装置
20日前
株式会社ダイヘン
負荷時タップ切換器
12日前
株式会社ダイヘン
ロボット制御システム
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
5日前
株式会社ダイヘン
パルスアーク溶接制御方法
14日前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
5日前
株式会社ダイヘン
2重シールドティグ溶接方法
5日前
株式会社ダイヘン
2重シールドティグ溶接方法
14日前
株式会社ダイヘン
2重シールドティグ溶接方法
14日前
東北電力株式会社
電圧調整装置
13日前
株式会社ダイヘン
フィルタ回路、および、電力変換装置
29日前
株式会社ダイヘン
処理装置、プログラム、及び処理方法
1か月前
株式会社ダイヘン
受電装置及びワイヤレス給電システム
7日前
株式会社ダイヘン
溶接ロボットおよびティーチングハンドル
29日前
株式会社ダイヘン
双腕装置の制御装置及びロボットシステム
22日前
株式会社ダイヘン
情報処理装置及びそれを用いた機器システム
1か月前
株式会社ダイヘン
安定度可視化装置及び安定度可視化プログラム
1か月前
株式会社ダイヘン
全体コントローラ、プログラム、及び処理方法
1か月前
株式会社ダイヘン
溶接ロボット
29日前
株式会社ダイヘン
溶接ロボット
29日前
株式会社ザイテック
吸着装置
5日前
日東精工株式会社
電動ドライバ
29日前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
1か月前
東京都公立大学法人
対象物把持装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ