TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025081805
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023194810
出願日
2023-11-16
発明の名称
安定度可視化装置及び安定度可視化プログラム
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
13/00 20060101AFI20250521BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】産業用ロボットの安定度をユーザが認識する。
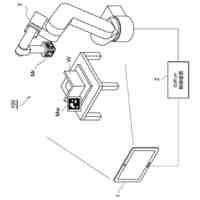
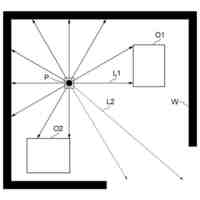
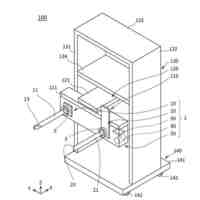
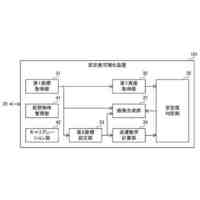
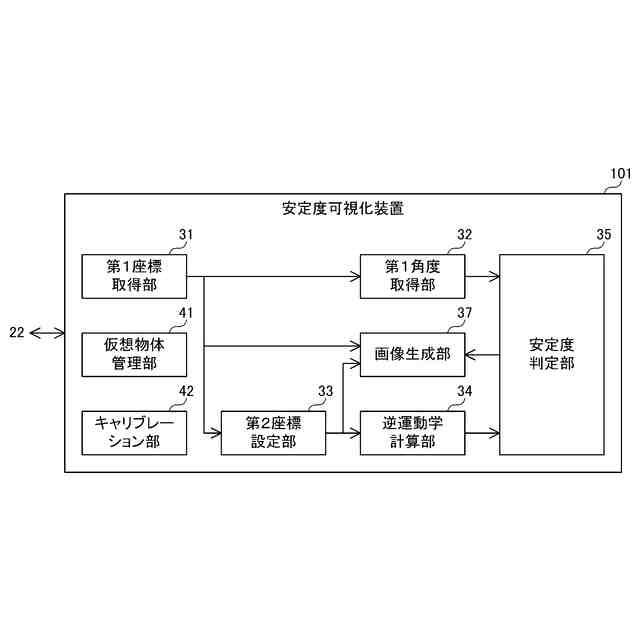
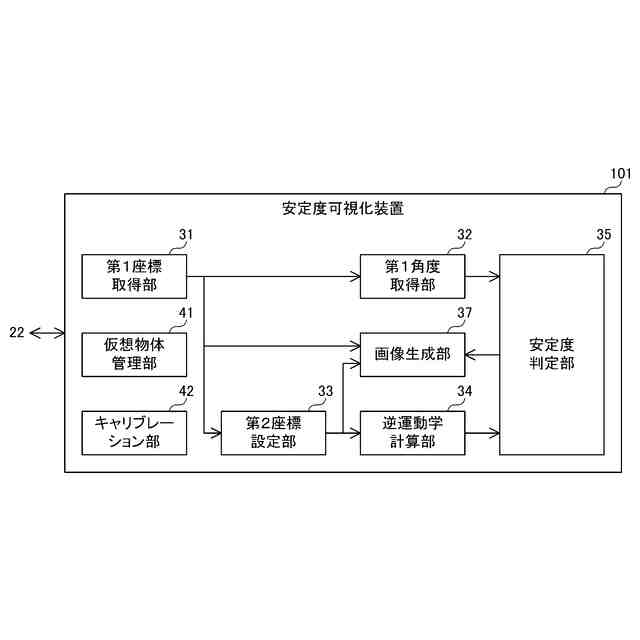
【解決手段】安定度可視化装置101は、複数の関節部を含むアームの先端部が第1座標に位置するときの、複数の関節部のそれぞれの開き具合である第1角度セットを取得する第1角度取得部32と、第1座標から異なる方向に離れた複数の第2座標それぞれに先端部が位置するときの、複数の関節部のそれぞれの開き具合である第2角度セットを計算する逆運動学計算部34と、第1角度セットに対する複数の第2角度セットそれぞれに基づいて、第1座標に対する複数の第2座標それぞれに関する、アームを有する産業用ロボットの安定度を判定する安定度判定部35と、産業用ロボットの少なくとも一部を表示する表示部27と、を備え、表示部27は、第1座標及び/又は第2座標を含む第1領域と、産業用ロボットを含む第2領域と、の少なくとも一部を、判定された安定度に応じた表示態様で表示する。
【選択図】図2
特許請求の範囲
【請求項1】
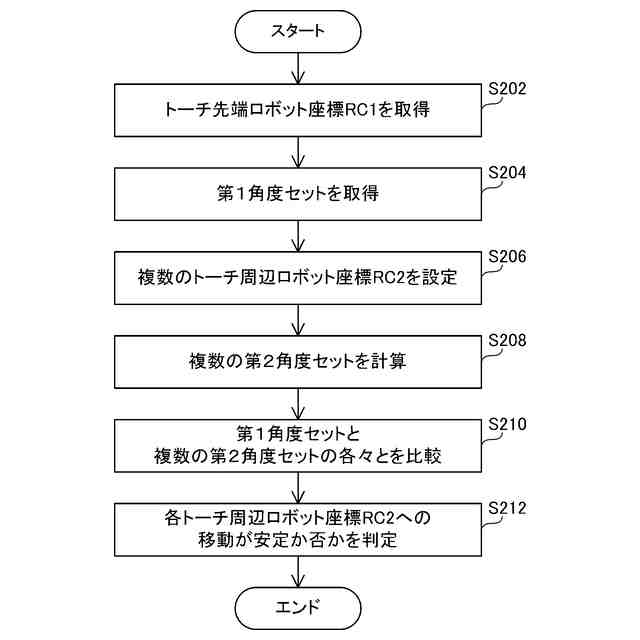
複数の回転軸周りにそれぞれ回転可能な複数の関節部を含むアームの先端部が位置する第1座標を取得する第1座標取得部と、
前記先端部が前記第1座標に位置するときの、前記複数の関節部のそれぞれの開き具合である複数の第1角度を含む第1角度セットを取得する第1角度取得部と、
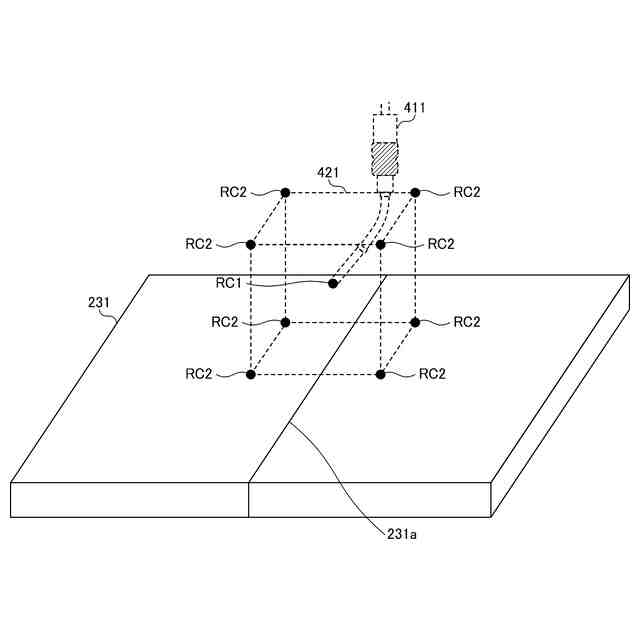
前記第1座標から異なる方向に離れた複数の第2座標を設定する第2座標設定部と、
前記先端部が前記複数の第2座標それぞれに位置するときの、前記複数の関節部のそれぞれの開き具合である複数の第2角度を含む第2角度セットを逆運動学によって計算する逆運動学計算部と、
前記第1角度セットに対する複数の前記第2角度セットそれぞれに基づいて、前記第1座標に対する前記複数の第2座標それぞれに関する、前記アームを有する産業用ロボットの安定度を判定する安定度判定部と、
前記産業用ロボットの少なくとも一部を表示する表示部と、を備え、
前記表示部は、前記第1座標及び/又は前記第2座標を含む第1領域と、前記産業用ロボットを含む第2領域と、の少なくとも一部を、前記判定された安定度に応じた表示態様で表示する、
安定度可視化装置。
続きを表示(約 940 文字)
【請求項2】
前記表示部は、複数の前記安定度のうち最も低い安定度に応じた表示態様で前記第1座標を含む前記第1領域と前記第2領域との少なくとも一部を表示する、
請求項1に記載の安定度可視化装置。
【請求項3】
前記表示部は、前記第1座標及び前記第2座標を含む前記第1領域において、前記第1座標と前記第2座標との間を、前記第1座標に対する前記第2座標の前記安定度に応じた表示態様で表示する、
請求項1に記載の安定度可視化装置。
【請求項4】
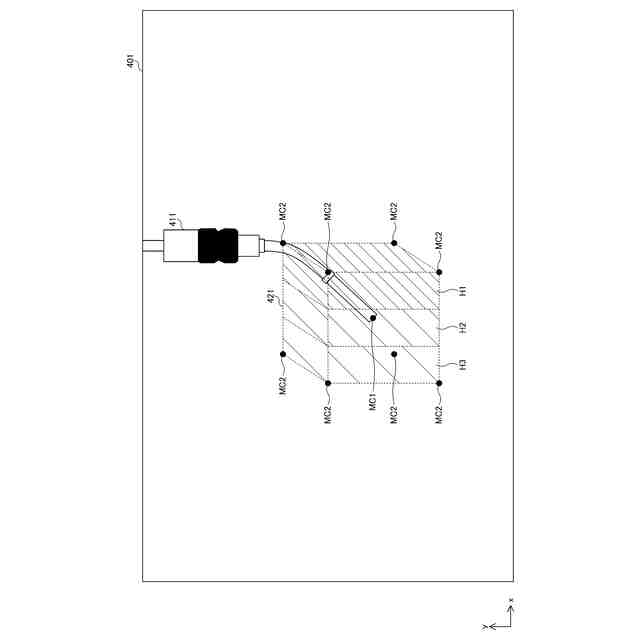
前記第1領域は、多面体に含まれる、
請求項3に記載の安定度可視化装置。
【請求項5】
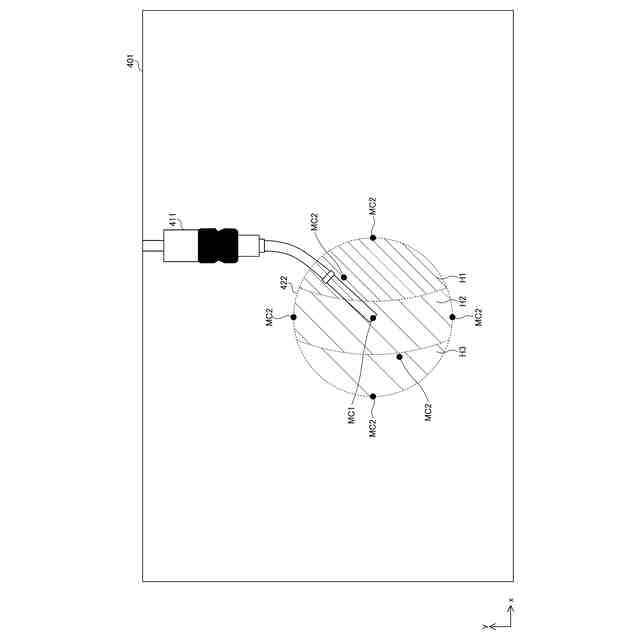
前記第1領域は、球体に含まれる、
請求項3に記載の安定度可視化装置。
【請求項6】
安定度可視化装置において用いられる安定度可視化プログラムであって、
コンピュータを、
複数の回転軸周りにそれぞれ回転可能な複数の関節部を含むアームの先端部が位置する第1座標を取得する第1座標取得部と、
前記先端部が前記第1座標に位置するときの、前記複数の関節部のそれぞれの開き具合である複数の第1角度を含む第1角度セットを取得する第1角度取得部と、
前記第1座標から異なる方向に離れた複数の第2座標を設定する第2座標設定部と、
前記先端部が前記複数の第2座標それぞれに位置するときの、前記複数の関節部のそれぞれの開き具合である複数の第2角度を含む第2角度セットを逆運動学によって計算する逆運動学計算部と、
前記第1角度セットに対する複数の前記第2角度セットそれぞれに基づいて、前記第1座標に対する前記複数の第2座標それぞれに関する、前記アームを有する産業用ロボットの安定度を判定する安定度判定部と、
前記産業用ロボットの少なくとも一部を表示する表示部と、として機能させるプログラムであり、
前記表示部は、前記第1座標及び/又は前記第2座標を含む第1領域と、前記産業用ロボットを含む第2領域と、の少なくとも一部を、前記判定された安定度に応じた表示態様で表示する、
安定度可視化プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、安定度可視化装置及び安定度可視化プログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
実際にロボットを設置して動作させることなく、ロボットの教示を行うことのできるロボット画像の表示方法がある(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2022-163836号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば、ロボットの手先部が特異点の近傍に位置する場合、手先部を少し移動させるとロボットの姿勢が大きく変化する不安定な状態になることがある。しかしながら、特許文献1に開示されている技術では、現在のロボットが安定な状態であるのか否かをユーザが認識することが困難である。
【0005】
そこで、本発明は、産業用ロボットの安定度をユーザが認識することが可能な安定度可視化装置及び安定度可視化プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る安定度可視化装置は、複数の回転軸周りにそれぞれ回転可能な複数の関節部を含むアームの先端部が位置する第1座標を取得する第1座標取得部と、先端部が第1座標に位置するときの、複数の関節部のそれぞれの開き具合である複数の第1角度を含む第1角度セットを取得する第1角度取得部と、第1座標から異なる方向に離れた複数の第2座標を設定する第2座標設定部と、先端部が複数の第2座標それぞれに位置するときの、複数の関節部のそれぞれの開き具合である複数の第2角度を含む第2角度セットを逆運動学によって計算する逆運動学計算部と、第1角度セットに対する複数の第2角度セットそれぞれに基づいて、第1座標に対する複数の第2座標それぞれに関する、アームを有する産業用ロボットの安定度を判定する安定度判定部と、産業用ロボットの少なくとも一部を表示する表示部と、を備え、表示部は、第1座標及び/又は第2座標を含む第1領域と、産業用ロボットを含む第2領域と、の少なくとも一部を、判定された安定度に応じた表示態様で表示する。
【0007】
この態様によれば、第1座標から第2座標へアームの先端部が移動するとしたときの産業用ロボットの安定度に応じた表示態様で、第1座標及び/又は第2座標を含む第1領域と、産業用ロボットを含む第2領域と、の少なくとも一部が表示される。これにより、表示部に表示されたこれらの領域の表示態様から、産業用ロボットの安定度をユーザが認識することができる。
【0008】
上記態様において、表示部は、複数の安定度のうち最も低い安定度に応じた表示態様で第1座標を含む第1領域と第2領域との少なくとも一部を表示してもよい。
【0009】
この態様によれば、第1座標の位置から複数の第2座標の位置のいずれかにアームの先端部を移動させるときの最も低い安定度を、第1座標を含む第1領域と第2領域との少なくとも一部の表示からユーザは認識することができる。これにより、ユーザは、第1座標の位置からのアームの先端部の移動に注意を要することを認識することができる。
【0010】
上記態様において、表示部は、第1座標及び第2座標を含む第1領域において、第1座標と第2座標との間を、第1座標に対する第2座標の安定度に応じた表示態様で表示してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
移動体
2日前
株式会社ダイヘン
移動体
22日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
充電装置
2日前
株式会社ダイヘン
搬送装置
22日前
株式会社ダイヘン
端末装置
1か月前
株式会社ダイヘン
ヒューズ
19日前
株式会社ダイヘン
充電装置
1か月前
株式会社ダイヘン
溶接ロボット
19日前
株式会社ダイヘン
溶接ロボット
19日前
株式会社ダイヘン
電圧調整装置
1か月前
株式会社ダイヘン
溶接システム
1か月前
株式会社ダイヘン
情報処理装置
1か月前
株式会社ダイヘン
電力システム
2日前
株式会社ダイヘン
レーザ溶接装置
10日前
株式会社ダイヘン
プラズマ処理装置
1か月前
株式会社ダイヘン
負荷時タップ切換器
2日前
株式会社ダイヘン
ロボット制御システム
22日前
株式会社ダイヘン
パルスアーク溶接制御方法
4日前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
22日前
株式会社ダイヘン
移動体、及び誘導線検出装置
22日前
株式会社ダイヘン
2重シールドティグ溶接方法
4日前
株式会社ダイヘン
移動体、及び誘導線検出装置
22日前
株式会社ダイヘン
2重シールドティグ溶接方法
4日前
東北電力株式会社
電圧調整装置
3日前
株式会社ダイヘン
搬送車及びインターロック解除方法
1か月前
株式会社ダイヘン
処理装置、プログラム、及び処理方法
23日前
株式会社ダイヘン
フィルタ回路、および、電力変換装置
19日前
株式会社ダイヘン
溶接ロボットおよびティーチングハンドル
19日前
株式会社ダイヘン
サブマージアーク溶接の溶接終了制御方法
1か月前
株式会社ダイヘン
双腕装置の制御装置及びロボットシステム
12日前
株式会社ダイヘン
情報処理装置及びそれを用いた機器システム
25日前
株式会社ダイヘン
プログラム、情報処理方法、及び情報処理装置
1か月前
株式会社ダイヘン
安定度可視化装置及び安定度可視化プログラム
24日前
株式会社ダイヘン
全体コントローラ、プログラム、及び処理方法
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ