TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025083709
公報種別
公開特許公報(A)
公開日
2025-06-02
出願番号
2023197248
出願日
2023-11-21
発明の名称
溶接ロボット
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B23K
9/12 20060101AFI20250526BHJP(工作機械;他に分類されない金属加工)
要約
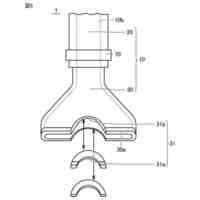
【課題】手溶接の準備や教示の手間無しに、ロボットを使用したまま簡易に溶接できる溶接ロボットを提供する。
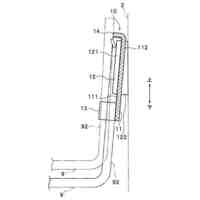
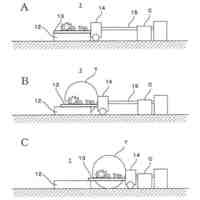
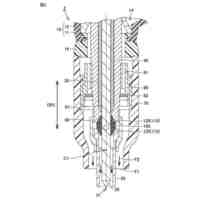
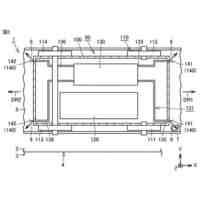
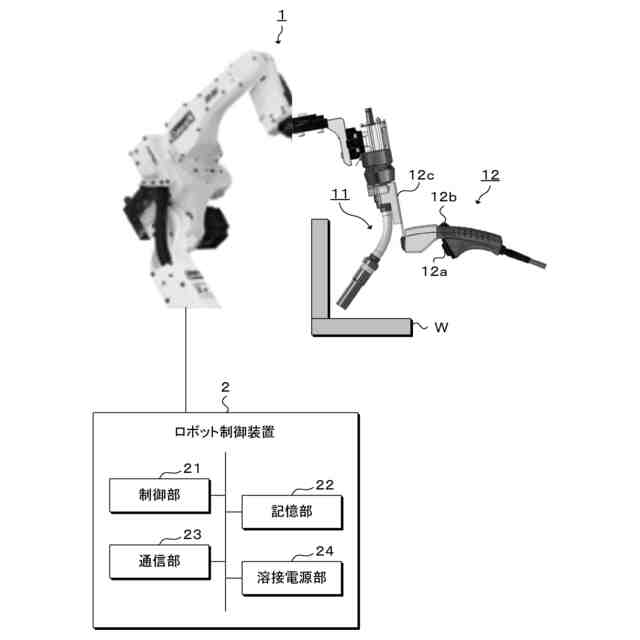
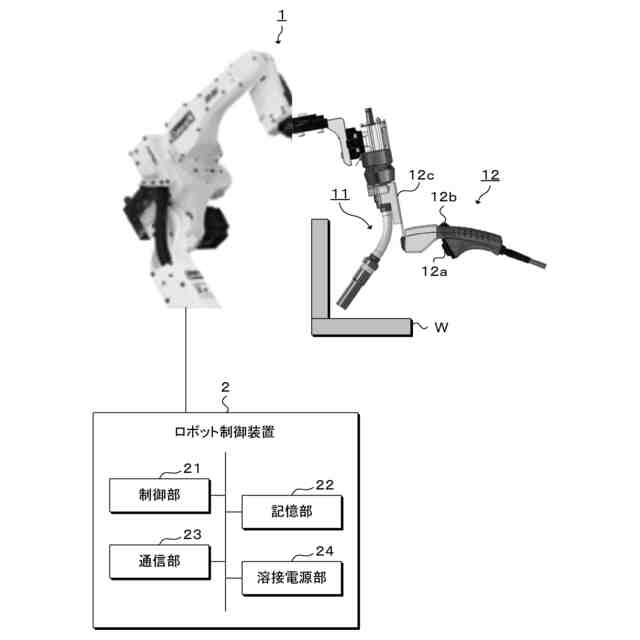
【解決手段】溶接ロボット1は、外力に応じて移動可能なアームの先端に連結される溶接トーチ部11と、溶接トーチ部11を移動させることが可能な把持部12と、スイッチ部12aと、を備え、スイッチ部12aは、オン状態の時にアーク溶接の実施を可能とし、オフ状態の時にアーク溶接の実施を不可能にする。
【選択図】図1
特許請求の範囲
【請求項1】
外力に応じて移動可能なアームの先端に連結される溶接トーチ部と、
前記溶接トーチ部を移動させることが可能な把持部と、
スイッチ部と、
を備え、
前記スイッチ部は、オン状態の時にアーク溶接の実施を可能とし、オフ状態の時にアーク溶接の実施を不可能にする、
溶接ロボット。
続きを表示(約 530 文字)
【請求項2】
アーク溶接の実施を可能にする溶接可モードと、アーク溶接の実施を不可能にする溶接不可モードと、を切り替える切替部を、さらに備え、
前記溶接可モードの時に前記スイッチ部をオン状態にするとアーク溶接を開始する一方、前記溶接可モードの時に前記スイッチ部をオフ状態にするとアーク溶接を終了する、
請求項1記載の溶接ロボット。
【請求項3】
前記溶接不可モードの時に前記スイッチ部をオン状態にしてもアーク溶接を開始しない、
請求項2記載の溶接ロボット。
【請求項4】
前記スイッチ部がオフ状態の時に、前記溶接トーチ部は外力に応じた移動が不可になる一方、前記スイッチ部がオン状態の時には、前記把持部の移動に伴って前記溶接トーチ部が移動する、
請求項1記載の溶接ロボット。
【請求項5】
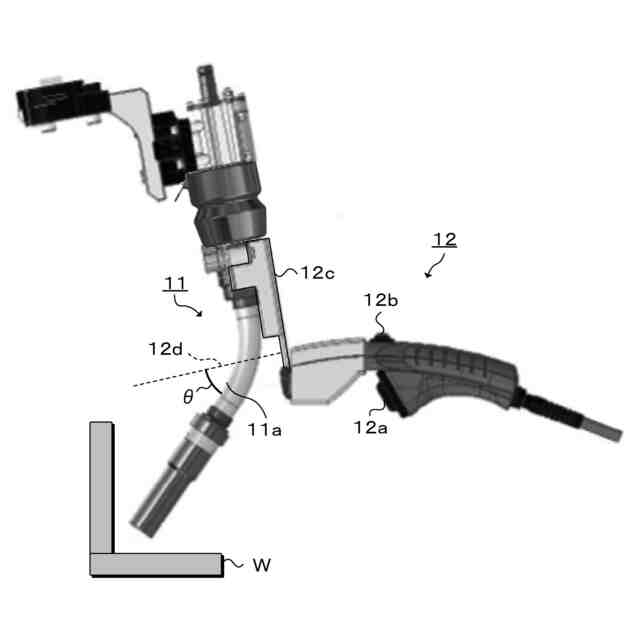
前記スイッチ部は、作業者が前記把持部を把持して作業する際に前記把持部の下側に位置するように設けられる、
請求項1記載の溶接ロボット。
【請求項6】
前記把持部は、前記溶接トーチ部の近傍に取り付け可能なツールである、
請求項1記載の溶接ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、溶接ロボットに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
下記特許文献1には、いわゆる一般的な人協働ロボットにおいて、ロボットに対する教示位置を作業者が手動で教示するリードスルー動作によってティーチペンダントを使うよりも簡易にロボット教示ができる直接教示という技術と、その直接教示の際にハンドルによりロボットを動かしやすくできることが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-199174号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
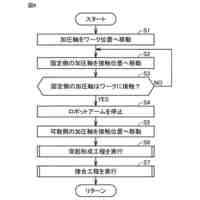
一方、ロボットで溶接を行う場合には、最初に接合予定のワークを治具等で固定し、溶接機による手溶接でワークを仮付け溶接するか、ロボットで教示を行った上でワークを仮付け溶接する必要がある。前者での仮付け溶接では、わざわざ手溶接を行う準備が必要となり、後者での仮付け溶接では、仮付け溶接だけのためにわざわざ教示が必要となる。
【0005】
そこで、本発明は、手溶接の準備や教示の手間無しに、ロボットを使用したまま簡易に溶接できる溶接ロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る溶接ロボットは、外力に応じて移動可能なアームの先端に連結される溶接トーチ部と、溶接トーチ部を移動させることが可能な把持部と、スイッチ部と、を備え、スイッチ部は、オン状態の時にアーク溶接の実施を可能とし、オフ状態の時にアーク溶接の実施を不可能にする。
【0007】
この態様によれば、外力に応じて移動可能な溶接トーチ部を移動させることが可能な把持部を設けることができ、さらに作業者がスイッチ部をオン状態にするとアーク溶接を実施できる一方、スイッチ部をオフ状態にするとアーク溶接を実施できないようにすることが可能となる。
【0008】
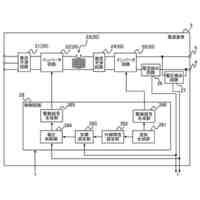
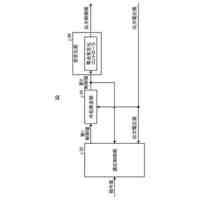
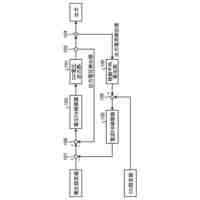
上記態様において、アーク溶接の実施を可能にする溶接可モードと、アーク溶接の実施を不可能にする溶接不可モードと、を切り替える切替部を、さらに備え、溶接可モードの時にスイッチ部をオン状態にするとアーク溶接を開始する一方、溶接可モードの時にスイッチ部をオフ状態にするとアーク溶接を終了することにしてもよい。
【0009】
この態様によれば、溶接可不可モードを切り替える切替部をさらに設けることで、溶接可モード時にスイッチ部をオン状態にするとアーク溶接を開始させることができる一方、溶接可モード時にスイッチ部をオフ状態にするとアーク溶接を終了させることができる。
【0010】
上記態様において、溶接不可モードの時にスイッチ部をオン状態にしてもアーク溶接を開始しないことにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイヘン
変圧器
1か月前
株式会社ダイヘン
溶接装置
1か月前
株式会社ダイヘン
移動装置
4日前
株式会社ダイヘン
電源装置
1か月前
株式会社ダイヘン
溶接装置
1か月前
株式会社ダイヘン
給電装置
27日前
株式会社ダイヘン
制御装置
29日前
株式会社ダイヘン
搬送装置
2か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
溶接トーチ
2か月前
株式会社ダイヘン
直流電源回路
1か月前
株式会社ダイヘン
溶接電源装置
1か月前
株式会社ダイヘン
溶接電源装置
26日前
株式会社ダイヘン
溶接電源装置
1か月前
株式会社ダイヘン
固相接合装置
1か月前
株式会社ダイヘン
高周波電源装置
1か月前
株式会社ダイヘン
安定度向上装置
1か月前
株式会社ダイヘン
スポット接合装置
25日前
株式会社ダイヘン
フラックス回収装置
1か月前
株式会社ダイヘン
サブマージアーク溶接機
1か月前
株式会社ダイヘン
コイル及び電力授受装置
1か月前
株式会社ダイヘン
サブマージアーク溶接機
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
2か月前
株式会社ダイヘン
吸引ノズルおよびその製造方法
1か月前
株式会社ダイヘン
固相接合装置および固相接合方法
1か月前
株式会社ダイヘン
制御回路、および、蓄電池システム
1か月前
株式会社ダイヘン
固相接合装置および固相接合システム
27日前
株式会社ダイヘン
DC電源装置、およびパルス発生装置
25日前
株式会社ダイヘン
充電予約管理装置及び充電予約管理方法
20日前
株式会社ダイヘン
集積構造体及びバッテリーパックの集積方法
1か月前
株式会社ダイヘン
プログラム、情報処理方法、及び情報処理装置
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ