TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083055
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2023196719
出願日
2023-11-20
発明の名称
移動体、及び誘導線検出装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
G05D
1/243 20240101AFI20250523BHJP(制御;調整)
要約
【課題】移動中にも誘導線を安定して検出できる誘導線検出装置を提供する。
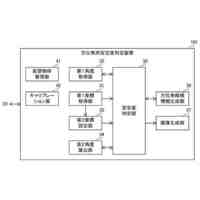
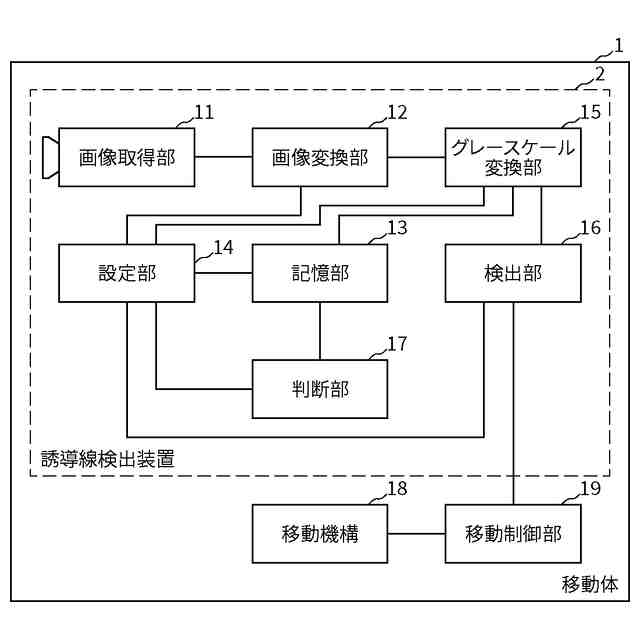
【解決手段】誘導線検出装置2は、床面の誘導線に応じて移動する移動体1の前方の撮影画像を取得する画像取得部11と、撮影画像を上方から見た撮影画像に変換する画像変換部12と、グレースケール変換に用いられる複数のパラメータを設定する設定部14と、複数のパラメータを用いて、基準色からの色の違いが大きくなるほど、基準色の画素の値である基準値との差がより大きくなるように撮影画像をグレースケール変換するグレースケール変換部15と、画像変換部12、及びグレースケール変換部15による変換の行われた撮影画像において誘導線を検出する検出部16とを備え、設定部14は、移動体1の移動の開始時及び移動中に複数のパラメータを設定する。このような構成により、移動体1の移動中にも、より安定して誘導線を検出することができる。
【選択図】図1
特許請求の範囲
【請求項1】
床面に設けられた視覚的に認識可能な誘導線に応じて移動する移動体の前方を撮影した撮影画像を取得する画像取得部と、
前記撮影画像を上方から見た撮影画像に画像変換する画像変換部と、
前記撮影画像をグレースケール変換する際に用いられる、誘導線の色である基準色に関する複数のパラメータを設定する設定部と、
前記設定部によって設定された複数のパラメータを用いて、誘導線の色である基準色からの色の違いが大きくなるほど、当該基準色に対応する画素の値である基準値との差がより大きくなるように前記撮影画像をグレースケール変換するグレースケール変換部と、
前記画像変換部による画像変換、及び前記グレースケール変換部によるグレースケール変換の行われた撮影画像において誘導線を検出する検出部と、を備え、
前記設定部は、前記複数のパラメータに基づいて検出された誘導線に対応する、前記画像変換部による画像変換、及び前記グレースケール変換部によるグレースケール変換の行われた撮影画像上のピクセルの値と、基準値との相違に応じた目的関数を最適化することによって、前記移動体の移動の開始時及び移動中に複数のパラメータを設定する、誘導線検出装置。
続きを表示(約 800 文字)
【請求項2】
前記複数のパラメータには、色空間の座標軸ごとに、基準色の座標値である色基準値、色基準値に関する範囲である基準範囲、色基準値から基準範囲以上離れた座標値のスコアである下限スコアがそれぞれ含まれる、請求項1記載の誘導線検出装置。
【請求項3】
前記設定部は、前記移動体の移動の開始時には、目的関数の値が、閾値より、前記ピクセルの値と前記基準値との相違が小さい側の値となった場合に複数のパラメータを設定する、請求項1記載の誘導線検出装置。
【請求項4】
複数のパラメータの設定に適した状況であるかどうかを判断する判断部をさらに備え、
前記設定部は、前記判断部によって複数のパラメータの設定に適していない状況であると判断された場合には、複数のパラメータの設定を行わない、請求項1記載の誘導線検出装置。
【請求項5】
前記判断部は、前記設定部による最適化後の目的関数の値が、過去に設定された複数のパラメータに対応する目的関数の値に対して、所定の条件を満たすほど前記ピクセルの値と前記基準値との相違が大きい側の値である場合に、複数のパラメータの設定に適していない状況であると判断する、請求項4記載の誘導線検出装置。
【請求項6】
前記判断部は、前記設定部による最適化後の目的関数の値が、閾値より、前記ピクセルの値と前記基準値との相違が大きい側の値である場合に、複数のパラメータの設定に適していない状況であると判断する、請求項4記載の誘導線検出装置。
【請求項7】
請求項1から請求項6のいずれか記載の誘導線検出装置と、
前記移動体を移動させる移動機構と、
前記検出部によって検出された誘導線に応じて前記移動体が移動するように前記移動機構を制御する移動制御部と、を備えた移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、床面に設けられた視覚的に認識可能な誘導線を検出する誘導線検出装置、及びその検出された誘導線を用いて移動する移動体に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、工場などにおいて、床面に設けられた誘導線を検出し、その検出した誘導線に沿って移動体を移動させることが行われている。なお、関連する技術として、道路の撮影画像の輝度勾配ベクトルを算出し、その輝度勾配ベクトルを用いて道路上の区画線を検出することが行われている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2008-021102号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、輝度を用いた場合には、朝と夕方などにおける採光が変化したときや、誘導線とその周囲との輝度の差が小さいときなどに、撮影画像において目的とする誘導線を安定して検出することが難しくなるという問題がある。また、屋内から屋外に出る場合などのように、移動体の移動中に光の状態が大きく変化する場合にも、撮影画像において目的とする誘導線を安定して検出することが困難になる。
【0005】
本発明は、上記課題を解決するためになされたものであり、移動体の移動開始時、及び移動中に、より安定して誘導線を検出することができる誘導線検出装置、及びその検出された誘導線を用いて移動する移動体を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一態様による誘導線検出装置は、床面に設けられた視覚的に認識可能な誘導線に応じて移動する移動体の前方を撮影した撮影画像を取得する画像取得部と、撮影画像を上方から見た撮影画像に画像変換する画像変換部と、撮影画像をグレースケール変換する際に用いられる、誘導線の色である基準色に関する複数のパラメータを設定する設定部と、設定部によって設定された複数のパラメータを用いて、誘導線の色である基準色からの色の違いが大きくなるほど、基準色に対応する画素の値である基準値との差がより大きくなるように撮影画像をグレースケール変換するグレースケール変換部と、画像変換部による画像変換、及びグレースケール変換部によるグレースケール変換の行われた撮影画像において誘導線を検出する検出部と、を備え、設定部は、複数のパラメータに基づいて検出された誘導線に対応する、画像変換部による画像変換、及びグレースケール変換部によるグレースケール変換の行われた撮影画像上のピクセルの値と、基準値との相違に応じた目的関数を最適化することによって、移動体の移動の開始時及び移動中に複数のパラメータを設定する、ものである。
【発明の効果】
【0007】
本発明の一態様による誘導線検出装置等によれば、移動体が移動を行う際に誘導線の色に関するパラメータを設定することにより、より安定して誘導線を検出することができるようになる。また、そのパラメータの設定を、移動体の移動中にも行うことによって、移動に応じた撮影画像中の誘導線の見え方の変化にも対応することができるようになる。
【図面の簡単な説明】
【0008】
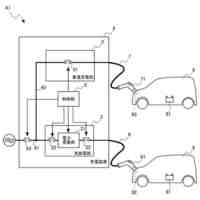
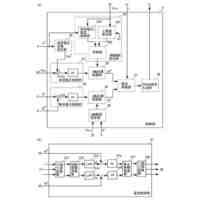
本発明の実施の形態による移動体の構成を示すブロック図
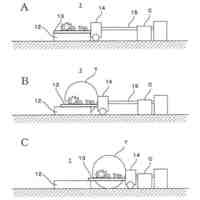
同実施の形態における移動体の移動領域を示す平面図
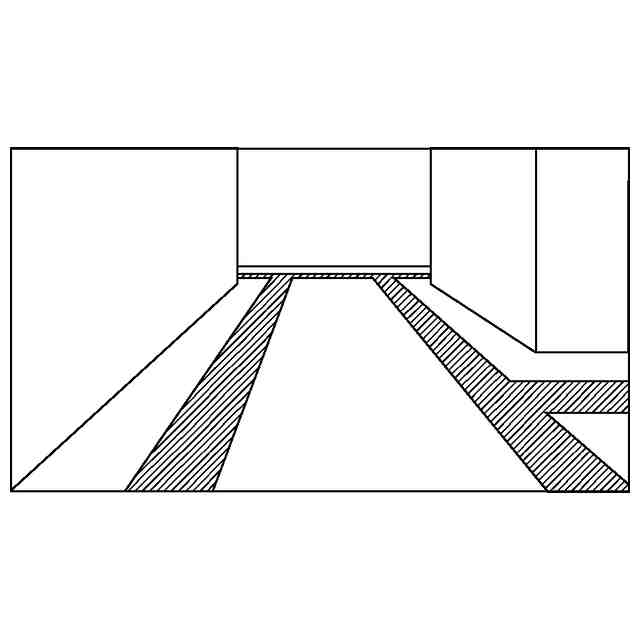
同実施の形態における撮影画像の一例を示す図
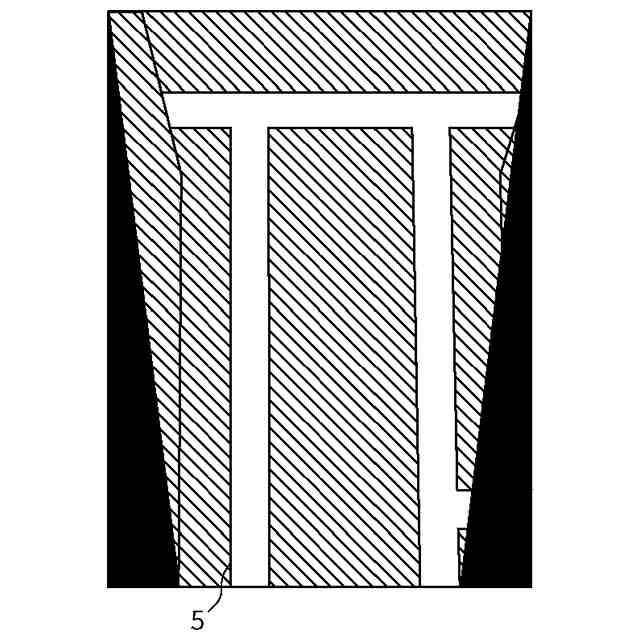
同実施の形態における平面画像の一例を示す図
同実施の形態におけるグレースケール変換後の平面画像の一例を示す図
同実施の形態における誘導線を検出する領域について説明するための図
同実施の形態における赤色のスコアの一例について説明するための図
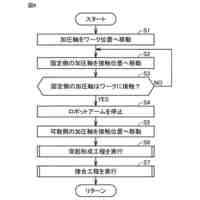
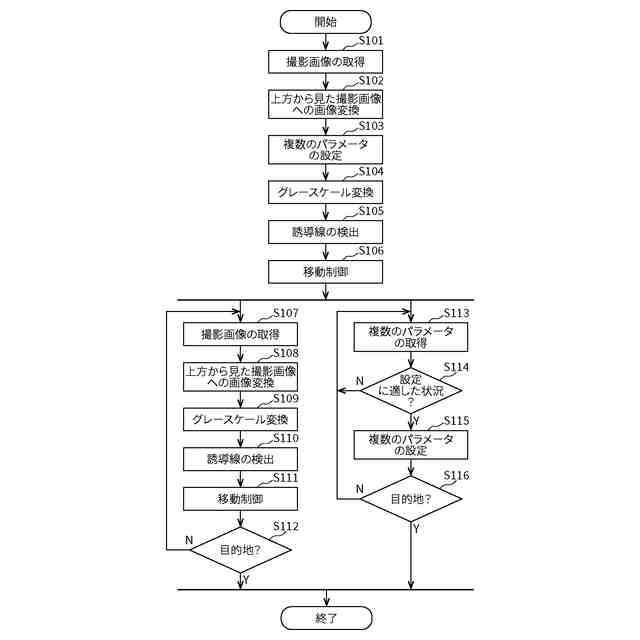
同実施の形態による移動体の動作を示すフローチャート
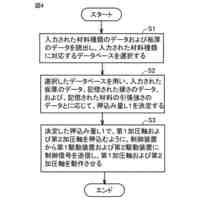
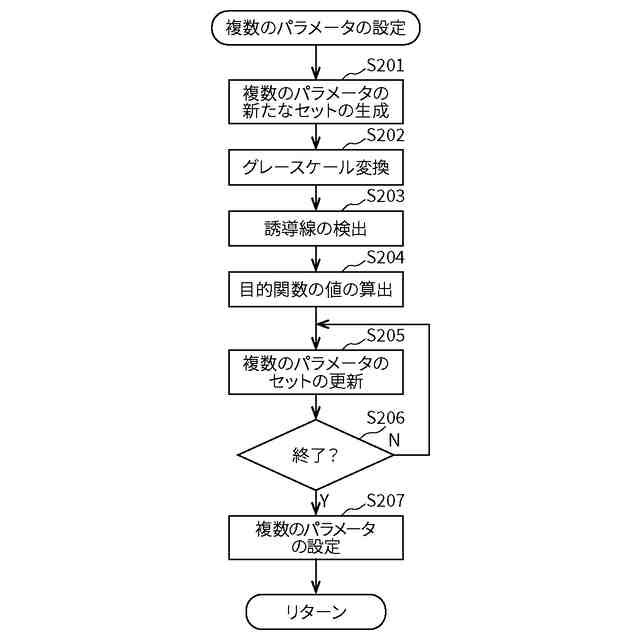
同実施の形態による誘導線検出装置の動作を示すフローチャート
【発明を実施するための形態】
【0009】
以下、本発明による移動体、及び誘導線検出装置について、実施の形態を用いて説明する。なお、以下の実施の形態において、同じ符号を付した構成要素及びステップは同一または相当するものであり、再度の説明を省略することがある。本実施の形態による誘導線検出装置は、誘導線をより適切に検出できるように、グレースケール変換を行う際の複数のパラメータを、移動体の移動の開始時及び移動中に設定するものである。
【0010】
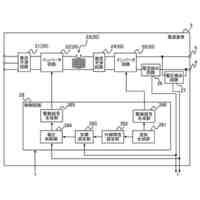
図1は、本実施の形態による移動体1の構成を示すブロック図である。本実施の形態による移動体1は、床面に設けられた視覚的に認識可能な誘導線に応じて移動するものであり、誘導線検出装置2と、移動体1を移動させる移動機構18と、誘導線検出装置2による誘導線の検出結果を用いて移動機構18を制御する移動制御部19とを備える。誘導線検出装置2は、画像取得部11と、画像変換部12と、記憶部13と、設定部14と、グレースケール変換部15と、検出部16と、判断部17とを備える。移動体1の用途は特に限定されないが、移動体1は、例えば、搬送を行う移動体であってもよく、警備や清掃などのその他の用途の移動体であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
変圧器
1か月前
株式会社ダイヘン
充電装置
1か月前
株式会社ダイヘン
制御装置
12日前
株式会社ダイヘン
溶接装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
電源装置
17日前
株式会社ダイヘン
溶接装置
1か月前
株式会社ダイヘン
給電装置
10日前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
溶接電源装置
24日前
株式会社ダイヘン
溶接電源装置
9日前
株式会社ダイヘン
直流電源回路
1か月前
株式会社ダイヘン
固相接合装置
24日前
株式会社ダイヘン
溶接電源装置
22日前
株式会社ダイヘン
安定度向上装置
1か月前
株式会社ダイヘン
高周波電源装置
1か月前
株式会社ダイヘン
スポット接合装置
8日前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイヘン
フラックス回収装置
1か月前
株式会社ダイヘン
サブマージアーク溶接機
1か月前
株式会社ダイヘン
コイル及び電力授受装置
15日前
株式会社ダイヘン
サブマージアーク溶接機
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
16日前
株式会社ダイヘン
パルスアーク溶接制御方法
16日前
株式会社ダイヘン
パルスアーク溶接制御方法
16日前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
吸引ノズルおよびその製造方法
1か月前
株式会社ダイヘン
固相接合装置および固相接合方法
24日前
株式会社ダイヘン
制御回路、および、蓄電池システム
24日前
株式会社ダイヘン
固相接合装置および固相接合システム
10日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ