TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025042264
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023149167
出願日
2023-09-14
発明の名称
物品移載装置
出願人
シブヤパッケージングシステム株式会社
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20250319BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】平坦面と凹凸面とを表裏に有する扁平な物品の表裏いずれかの面を吸着して所定の移載箇所に移載する物品移載装置において、脆い物品の割れや欠けを防止する。
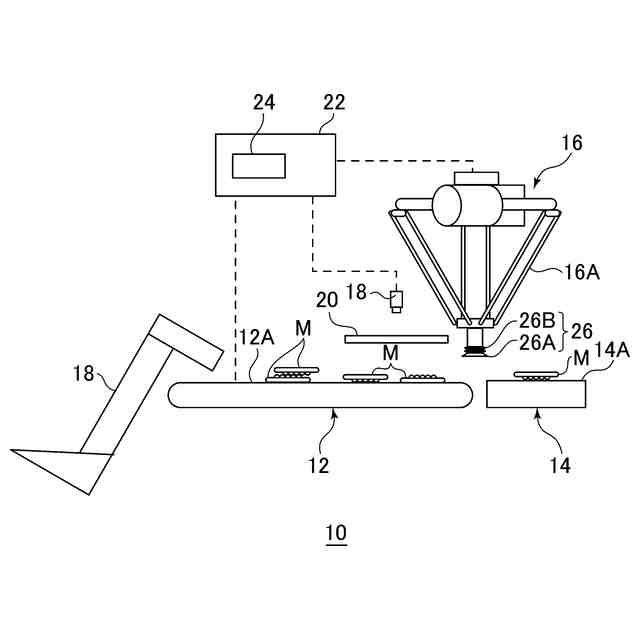
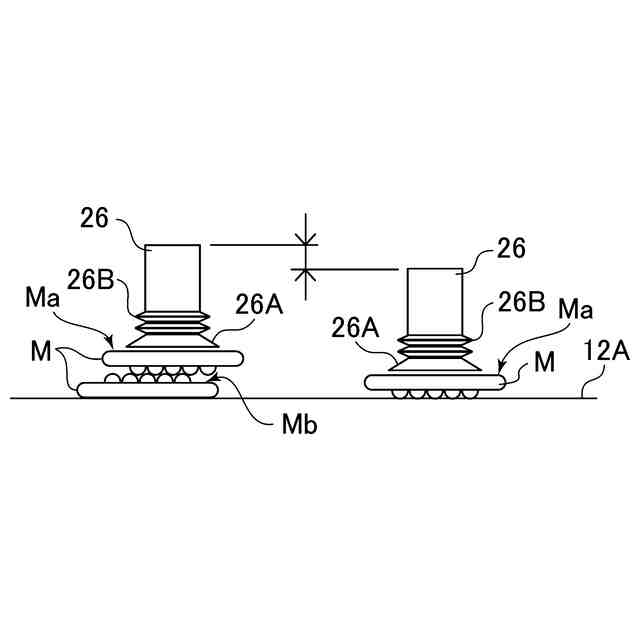
【解決手段】平坦面と凹凸面とを表裏に有する扁平な物品Mの表裏いずれかの面を吸着して所定の移載箇所に移載する物品移載装置10であって、物品移載装置10は、表裏を揃えずに載置面である供給コンベヤ12の搬送面12Aに載置された物品Mの画像を撮影するカメラ18と、撮影された画像から移載対象とする物品Mが表裏いずれの面を上方に向けているかを判定する表裏判定部24と、物品Mの平坦面Maおよび凹凸面Mbを吸着可能な吸着ヘッド26を備えて物品Mを吸着して移動させるロボット16と、ロボット16の動作を制御するコントローラ22とを備える。コントローラ22は物品移載装置10により、物品Mの平坦面Maを吸着する場合は、凹凸面Mbを吸着する場合よりも吸着ヘッド26を搬送面12Aから上方に離隔させて吸着る。
【選択図】図2
特許請求の範囲
【請求項1】
平坦面と凹凸面とを表裏に有する扁平な物品の表裏いずれかの面を吸着して所定の移載箇所に移載する物品移載装置において、
表裏を揃えずに載置面上に載置された物品の画像を撮影する撮影手段と、
撮影された画像から移載対象とする物品が表裏いずれの面を上方に向けて載置されているかを判定する表裏判定手段と、
上記物品の平坦面および凹凸面を吸着可能な吸着部を備えて物品を吸着して移動させる物品移動手段と、
上記物品移動手段の動作を制御する制御手段とを備え、
上記制御手段は物品移動手段により、上記物品の平坦面を吸着する場合は、凹凸面を吸着する場合よりも上記吸着部を載置面から上方に離隔させて吸着することを特徴とする物品移載装置。
続きを表示(約 140 文字)
【請求項2】
上記制御手段は物品移動手段により吸着した物品を所定の移載箇所に移載する際に、上記吸着部が物品の平坦面を吸着している場合は、凹凸面を吸着している場合よりも上記吸着部を移載箇所から上方に離隔させて吸着を解除することを特徴とする請求項1に記載の物品移載装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、平坦面と凹凸面とを表裏に有する扁平な物品の表裏いずれかの面を吸着して所定の移載箇所に移載する物品移載装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ビジョントラッキングのロボットシステムを利用した具材供給装置において、供給コンベア上に設置したカメラからの画像を用いてワークの画像処理を行い、取得できたワークの検出データに基づいてロボットのピック&プレイス動作を行う装置が知られている。例えば、カップ麺の製造ラインでは、天ぷらなどのように表面と裏面の一方が平坦面、他方が凹凸面で構成される偏平な具材がワークとして取り扱われる。天ぷらは、平坦面、凹凸面のいずれかの面がロボットにより吸着されて移載される(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第7328499号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、天ぷらのような具材(ワーク)は乾燥状態とされ脆くなっており、吸着時や移載時の衝撃で割れたり欠けたりすることがある。特に、天ぷらのように表と裏でワーク形状が異なる場合、表側を吸着する場合と裏側を吸着する場合とで同じ制御で吸着、保持解除を行うとワークが割れたり欠けたりすることがある。例えば、凹凸面が載置面に接した状態(凹凸面が下向きの状態)では接地が安定しないので吸着時に平坦面に吸盤を押し付けると割れやすい。また、移載時にも同様に、凹凸面を移載箇所に押し付けると割れやすいという問題がある。
【0005】
本発明は、平坦面と凹凸面とを表裏に有する扁平な物品の表裏いずれかの面を吸着して所定の移載箇所に移載する物品移載装置において、脆い物品の割れや欠けを防止することを課題としている。
【課題を解決するための手段】
【0006】
本発明の第1の発明である物品移載装置は、平坦面と凹凸面とを表裏に有する扁平な物品の表裏いずれかの面を吸着して所定の移載箇所に移載する物品移載装置において、表裏を揃えずに載置面上に載置された物品の画像を撮影する撮影手段と、撮影された画像から移載対象とする物品が表裏いずれの面を上方に向けて載置されているかを判定する表裏判定手段と、上記物品の平坦面および凹凸面を吸着可能な吸着部を備えて物品を吸着して移動させる物品移動手段と、上記物品移動手段の動作を制御する制御手段とを備え、上記制御手段は物品移動手段により、上記物品の平坦面を吸着する場合は、凹凸面を吸着する場合よりも上記吸着部を載置面から上方に離隔させて吸着することを特徴としている。
【0007】
本発明の第2の発明である物品移載装置は、第1の発明において、上記制御手段は物品移動手段により吸着した物品を所定の移載箇所に移載する際に、上記吸着部が物品の平坦面を吸着している場合は、凹凸面を吸着している場合よりも上記吸着部を移載箇所から上方に離隔させて吸着を解除することを特徴としている。
【発明の効果】
【0008】
本発明によれば、平坦面と凹凸面とを表裏に有する扁平な物品の表裏いずれかの面を吸着して所定の移載箇所に移載する物品移載装置において、脆い物品の割れや欠けを防止することができる。
【図面の簡単な説明】
【0009】
本実施形態の物品移載装置の配置を示す模式的な側面図である。
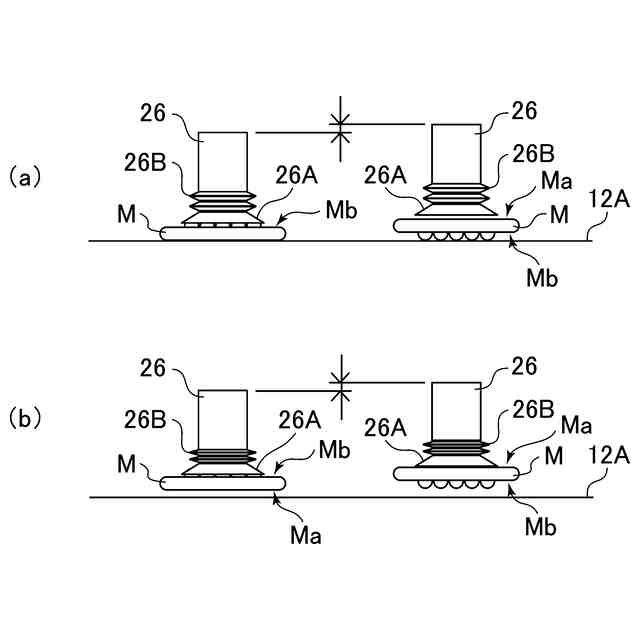
物品を吸着するときの平坦面を吸着する場合と凹凸面を吸着する場合における、吸着ヘッドの高さの比較を模式的に示す説明図である。
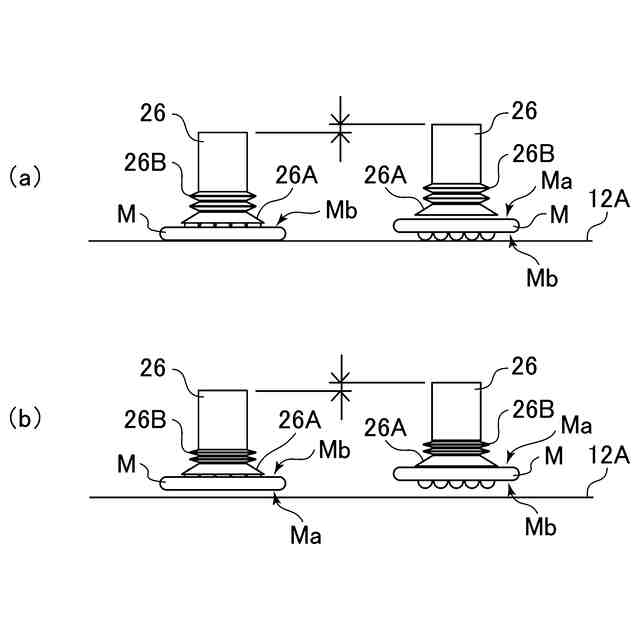
吸着した物品を移載するときの平坦面を吸着している場合と凹凸面を吸着している場合における、吸着ヘッドの高さの比較を模式的に示す説明図である。
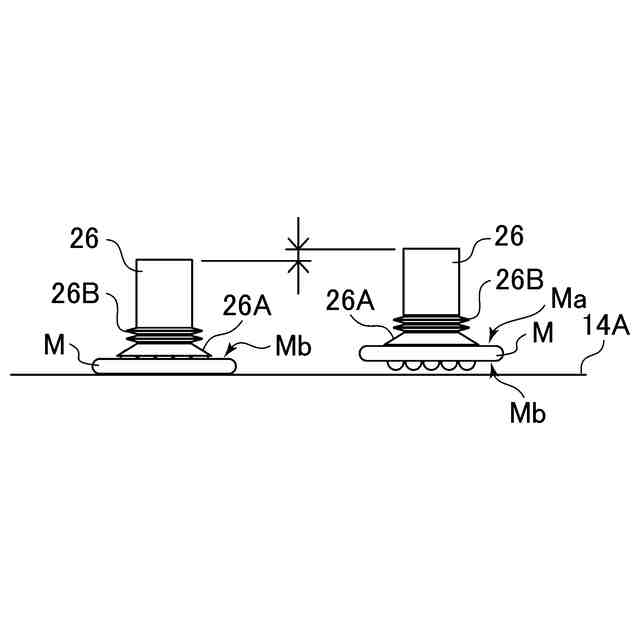
物品を吸着するときの重なった物品の一番上の物品を吸着する場合と単独の物品を吸着する場合における、吸着ヘッドの高さの比較を模式的に示す説明図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について添付図面を参照して説明する。図1は本実施形態の物品移載装置の配置を示す模式的な側面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
9日前
株式会社クレスコ
補助吸着具
2日前
株式会社不二越
ロボット
1か月前
個人
けがき用治具
1か月前
株式会社エビス
腰ベルト用連結具
9日前
個人
深孔スリーブ駆動ロッド構造
22日前
株式会社不二越
ロボット操作装置
29日前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
17日前
株式会社デンソー
操縦桿
1か月前
個人
バール
22日前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
梅馨堂合同会社
人協働ロボットシステム
24日前
ARMA株式会社
UI付エンドエフェクタ
25日前
株式会社デンソーウェーブ
ロボット制御システム
15日前
アピュアン株式会社
エアー式衝撃工具
12日前
学校法人法政大学
装着型アシスト装置
19日前
株式会社マキタ
作業機
29日前
若井ホールディングス株式会社
レンチ構造とその製造方法
1か月前
三菱電機株式会社
トルク締め個所検出システム
22日前
高丸工業株式会社
ロボット操作システムの動作方法
22日前
株式会社マキタ
インパクト工具
10日前
株式会社マキタ
インパクト工具
10日前
SB C&S株式会社
治具セット
9日前
株式会社不二越
ロボットの教示システム及び教示方法
16日前
中国電力株式会社
電動ドライバー
16日前
シブヤパッケージングシステム株式会社
物品移載装置
1か月前
オムロン株式会社
モバイルロボット
16日前
オムロン株式会社
モバイルロボット
16日前
株式会社デンソー
解体装置および解体プログラム
1か月前
株式会社デンソー
作業装置および作業プログラム
1か月前
株式会社ベッセル工業
インパクト工具
1か月前
JUKI株式会社
ハンドリング装置
24日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
12日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
16日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ