TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025060205
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170786
出願日
2023-09-29
発明の名称
モバイルロボット
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
5/00 20060101AFI20250403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】モバイルロボットにおいて、旋回時の転倒を抑制する。
【解決手段】モバイルロボットは、台車部と、台車部を旋回走行させる移動機構と、台車部に接続され鉛直方向の第一回転軸を有する第一関節と、第一端部及び第二端部を有し第一端部が第一関節に接続され第一回転軸に直交する直交回転軸を有する関節を含む台車側アーム調整部と、第三端部及び第四端部を有し第三端部が第二端部に接続される中間アーム調整部と、第四端部に接続される先端側アーム領域と、を含むアーム部と、移動機構及びアーム部を制御する制御部と、を備え、制御部は、台車部の旋回走行時に、直交回転軸が台車部の走行方向と垂直になるよう第一関節を制御し、且つ、先端側アーム領域の重心位置が旋回開始前の重心位置よりも旋回中心の方向に移動するように中間アーム調整部に含まれる中間関節を制御する。
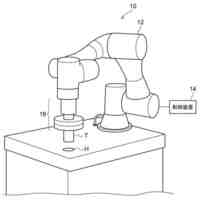
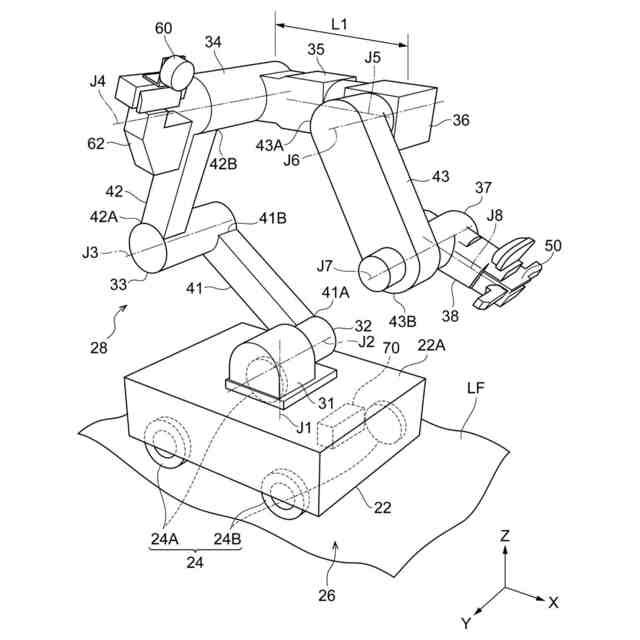
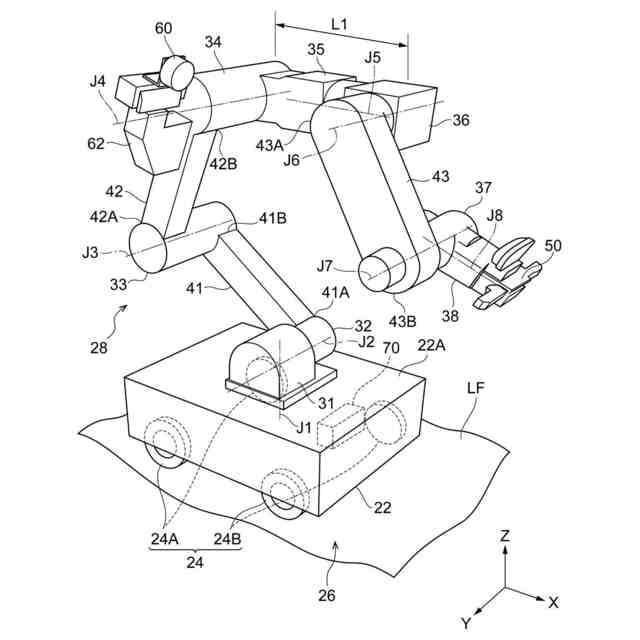
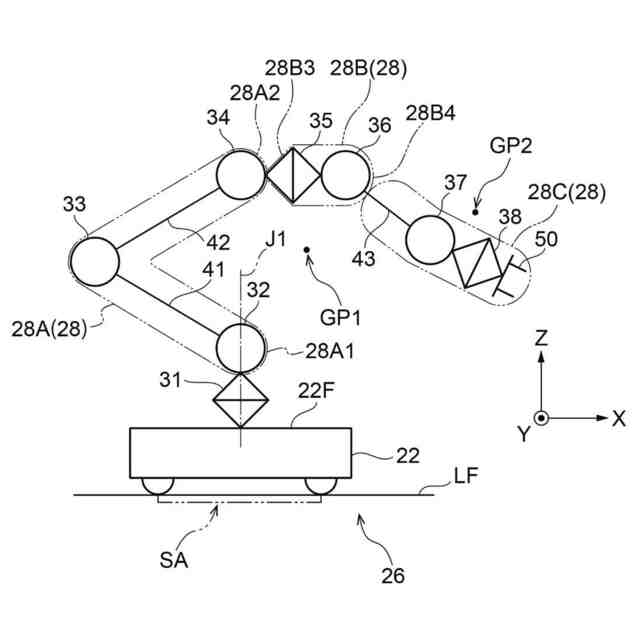
【選択図】図1
特許請求の範囲
【請求項1】
台車部と、
前記台車部を旋回走行させる移動機構と、
前記台車部に接続され鉛直方向の第一回転軸を有する第一関節と、第一端部及び第二端部を有し前記第一端部が前記第一関節に接続される台車側アーム調整部と、第三端部及び第四端部を有し前記第三端部が前記第二端部に接続される中間アーム調整部と、前記第四端部に接続される先端側アーム領域と、を含むアーム部と、
前記移動機構及び前記アーム部を制御する制御部と、
を備え、
前記台車側アーム調整部は、前記第一回転軸に直交する1つの直交回転軸を有する1つの関節、又は前記第一回転軸と直交し互いに平行である複数の直交回転軸をそれぞれ有する複数の関節を含み、
前記中間アーム調整部は、前記先端側アーム領域の重心位置を、前記第一回転軸を通る平面であって前記1又は複数の直交回転軸に垂直な平面である基準平面の面外方向に移動させる中間関節を含み、
前記制御部は、
前記台車部の旋回走行時に、前記基準平面が前記台車部の走行方向と平行になるよう前記第一関節を制御し、且つ、前記先端側アーム領域の重心位置が旋回開始前の重心位置よりも旋回中心に向かう方向成分を持った方向に移動するように前記中間関節を制御する、モバイルロボット。
続きを表示(約 820 文字)
【請求項2】
前記中間関節は、前記直交回転軸と直交する第五回転軸を有する第五関節であり、
前記制御部は、前記台車部の旋回走行時に、前記先端側アーム領域の重心位置が前記第五回転軸上から離れた位置にある状態において、前記先端側アーム領域の重心位置が旋回中心に向かう方向成分を有する方向に移動するように前記第五関節を制御する、請求項1に記載のモバイルロボット。
【請求項3】
前記中間アーム調整部は、前記直交回転軸と直交する第五回転軸を有する第五関節と、前記第五回転軸と直交する第六回転軸を有し前記第五関節よりも前記台車側アーム調整部とは反対側にある第六関節とを含み、
前記中間関節は、前記第六関節であり、
前記制御部は、前記台車部の旋回走行時に、前記第六回転軸の方向が前記直交回転軸と直交する方向の成分を有する方向となるように前記第五関節を制御し、且つ、前記先端側アーム領域の重心位置が前記第六回転軸上から離れた位置にある状態において、前記先端側アーム領域の重心位置が旋回中心に向かう方向成分を有する方向に移動するように前記第六関節を制御する、請求項1に記載のモバイルロボット。
【請求項4】
前記台車側アーム調整部は、
前記第一関節に他の関節を介在させることなく接続され、前記第一回転軸に対して直交する方向の第二回転軸を有する第二関節と、
前記第二関節に一端が接続され、前記第二回転軸に対して垂直な方向に長さを有する第一リンクと、
前記第一リンクの他端に設けられ、前記第二回転軸と平行な第三回転軸を有する第三関節と、
前記第三関節に一端が接続され、前記第三回転軸に対して垂直な方向に長さを有する第二リンクと、
前記第二リンクの他端に設けられ、前記第三回転軸と平行な第四回転軸を有する第四関節と、
を含む請求項1に記載のモバイルロボット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モバイルロボットに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
特許文献1には、台車と、台車に搭載されたマニピュレータとを備えた台車移動型ロボットが記載されている。マニピュレータは、ベースに回転可能に支持された旋回胴と、旋回胴に支持された複数のアーム等を備えている。
【先行技術文献】
【特許文献】
【0003】
WO2021/235520号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
物体を把持して操作すること及び物体を搬送することのために、台車部と、台車部に搭載されたアーム部とを備えるモバイルロボットを用いることができる。アーム部の好適な基本構造の一つは、台車部に接続され鉛直方向の第一回転軸を有する第一関節と、下端が第一関節に接続される台車側アーム調整部を備え、さらに台車側アーム調整部の上端からエンドエフェクタに至る上肢部を備える構造である。台車側アーム調整部は、第一回転軸と直交する1つの直交回転軸を有する1つの関節、又は第一回転軸と直交し互いに平行である複数の直交回転軸をそれぞれ有する複数の関節を備える。モバイルロボットは、物体に対する操作を行うときは、上肢部を、概略、台車側アーム調整部の直交回転軸に直交する水平方向に伸ばす姿勢にする。上肢部を伸ばす水平面内方向は、第一回転軸を回転させることにより変えることができる。モバイルロボットは、走行するときは、上肢部を、概略、進行方向に伸ばす姿勢にする。このとき、台車側アーム調整部の直交回転軸は進行方向に対してほぼ垂直な水平方向となる。
【0005】
モバイルロボットにおいては、加速走行、減速走行、又は旋回走行をするときに発生する慣性力によって転倒することを抑制する必要がある。加速走行又は減速走行をするときに発生する慣性力による転倒については、台車側アーム調整部の直交回転軸を有する関節を回転させてアーム部を前傾姿勢又は後傾姿勢にすることによって抑制することができる。旋回走行をするときに発生する慣性力による転倒を抑制するためには、アーム部の重心位置を進行方向に対して右方向又は左方向である旋回中心の方向に移動させる必要がある。アーム部の台車に近い位置に進行方向に平行な回転軸があればその回転軸よりも上方のアーム部を進行方向に対して右方向又は左方向に傾けることによって必要な重心移動ができるが、ここで想定している基本構造を有するアーム部は、台車側アーム調整部に進行方向に平行な回転軸を持たないので、アーム部のほぼ全体を進行方向に対して右方向又は左方向に傾けることができない。
【0006】
本開示は、台車部と、台車部に搭載されたアーム部とを備え、アーム部は、台車部に接続され鉛直方向の第一回転軸を有する第一関節と、下端が第一関節に接続される台車側アーム調整部と、台車側アーム調整部の上端からエンドエフェクタに至る上肢部とを備え、台車側アーム調整部は、第一回転軸と直交する直交回転軸を有する1つの関節、又は第一回転軸と直交し互いに平行である複数の直交回転軸をそれぞれ有する複数の関節を備える構造のモバイルロボットにおいて、旋回時の転倒を抑制することを目的とする。
【課題を解決するための手段】
【0007】
本開示の一態様は、台車部と、前記台車部を旋回走行させる移動機構と、前記台車部に接続され鉛直方向の第一回転軸を有する第一関節と、第一端部及び第二端部を有し前記第一端部が前記第一関節に接続される台車側アーム調整部と、第三端部及び第四端部を有し前記第三端部が前記第二端部に接続される中間アーム調整部と、前記第四端部に接続される先端側アーム領域と、を含むアーム部と、前記移動機構及び前記アーム部を制御する制御部と、を備え、前記台車側アーム調整部は、前記第一回転軸に直交する1つの直交回転軸を有する1つの関節、又は前記第一回転軸と直交し互いに平行である複数の直交回転軸をそれぞれ有する複数の関節を含み、前記中間アーム調整部は、前記先端側アーム領域の重心位置を、前記第一回転軸を通る平面であって前記1又は複数の直交回転軸に垂直な平面である基準平面の面外方向に移動させる中間関節を含み、前記制御部は、前記台車部の旋回走行時に、前記基準平面が前記台車部の走行方向と平行になるよう前記第一関節を制御し、且つ、前記先端側アーム領域の重心位置が旋回開始前の重心位置よりも旋回中心に向かう方向成分を持った方向に移動するように前記中間関節を制御する、モバイルロボットである。
【発明の効果】
【0008】
本開示によれば、台車部と、台車部に搭載されたアーム部とを備え、アーム部は、台車部に接続され鉛直方向の第一回転軸を有する第一関節と、下端が第一関節に接続される台車側アーム調整部と、台車側アーム調整部の上端からエンドエフェクタに至る上肢部とを備え、台車側アーム調整部は、第一回転軸と直交する直交回転軸を有する1つの関節、又は第一回転軸と直交し互いに平行である複数の直交回転軸をそれぞれ有する複数の関節を備える構造のモバイルロボットにおいて、旋回時の転倒を抑制できる。
【図面の簡単な説明】
【0009】
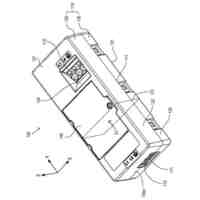
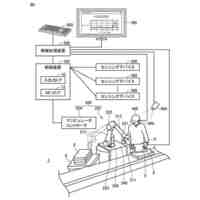
図1は実施形態のモバイルロボットを示す斜視図である。
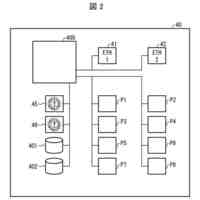
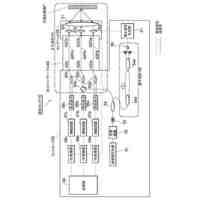
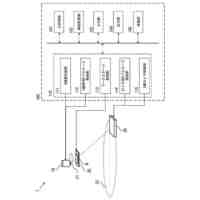
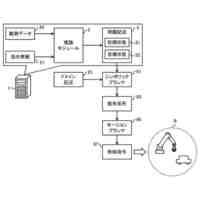
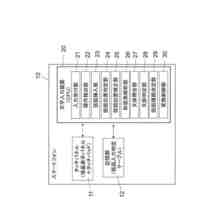
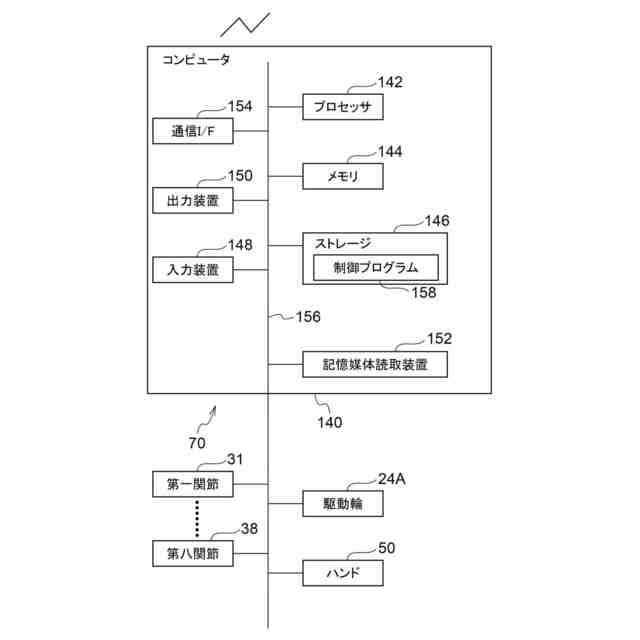
図2は実施形態のモバイルロボットの制御部を示す構成図である。
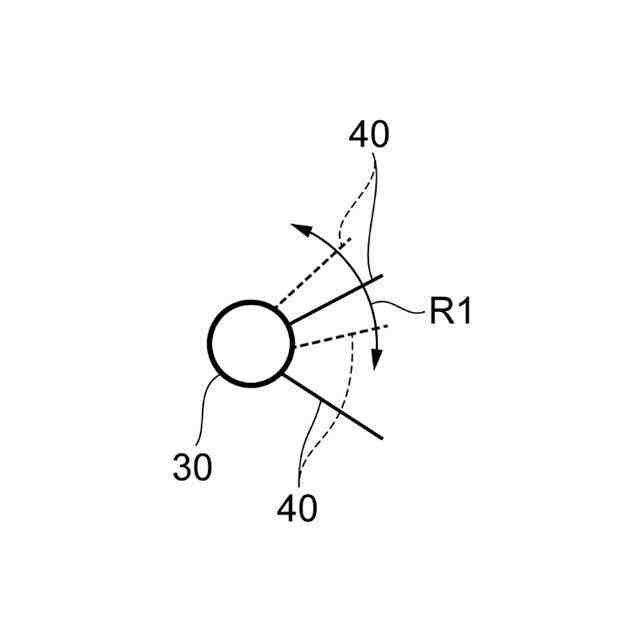
図3Aは実施形態のモバイルロボットの関節の動作を示す説明図である。
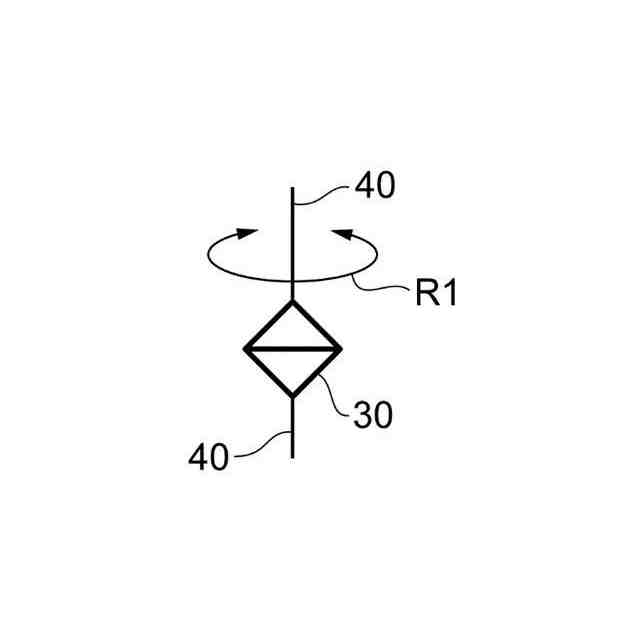
図3Bは実施形態のモバイルロボットの関節の動作を示す説明図である。
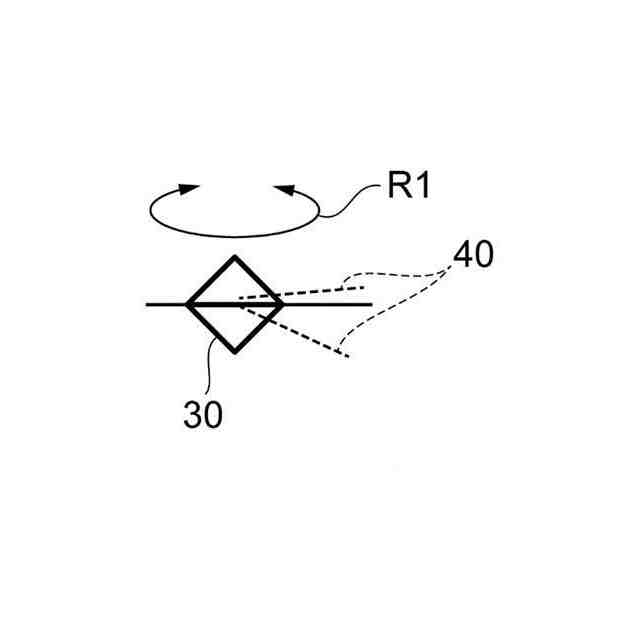
図3Cは実施形態のモバイルロボットの関節の動作を示す説明図である。
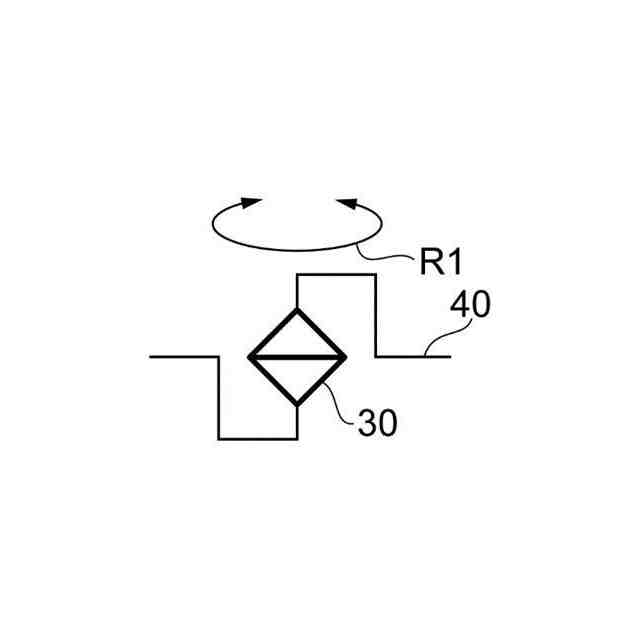
図3DはJIS規格に従う場合の関節及びリンクの表記を示す説明図である。
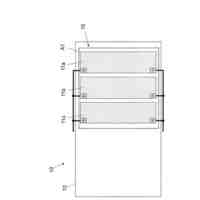
図4は実施形態のモバイルロボットの代表姿勢を示す側面図である。
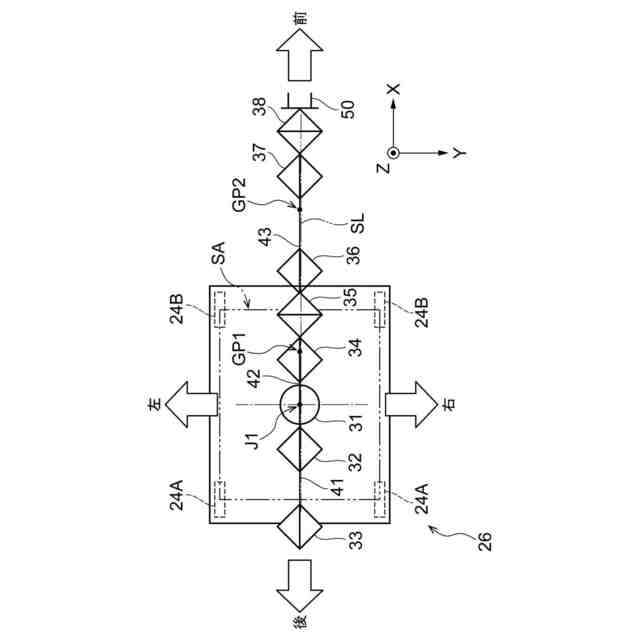
図5は実施形態のモバイルロボットの代表姿勢を示す平面図である。
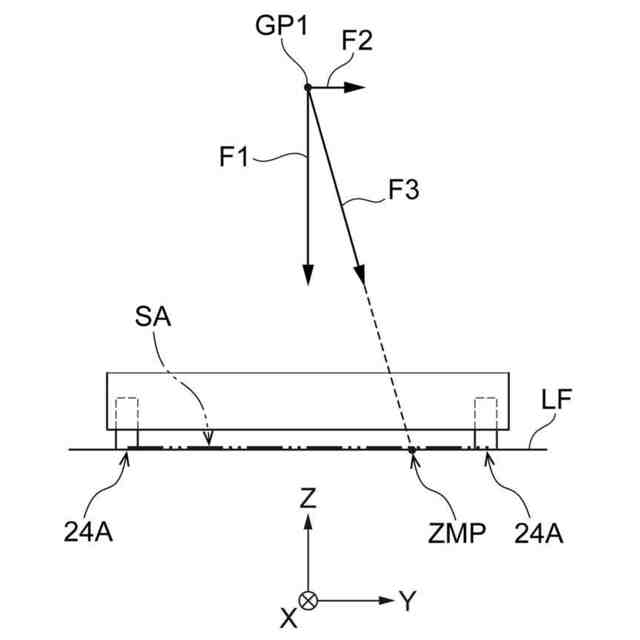
図6は実施形態のモバイルロボットの代表姿勢におけるゼロ・モーメント・ポイントを示す背面図である。
図7は実施形態のモバイルロボットの旋回走行を示す平面図である。
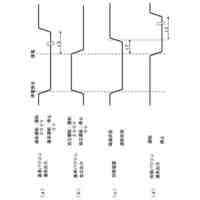
図8Aは実施形態のモバイルロボットの旋回走行時の第一関節の回転角度の時間変化を示すグラフである。
図8Bは実施形態のモバイルロボットの旋回走行時の第二関節の回転角度の時間変化を示すグラフである。
図8Cは実施形態のモバイルロボットの旋回走行時の第三関節の回転角度の時間変化を示すグラフである。
図8Dは実施形態のモバイルロボットの旋回走行時の第四関節の回転角度の時間変化を示すグラフである。
図8Eは実施形態のモバイルロボットの旋回走行時の第五関節の回転角度の時間変化を示すグラフである。
図8Fは実施形態のモバイルロボットの旋回走行時の第六関節の回転角度の時間変化を示すグラフである。
図8Gは実施形態のモバイルロボットの旋回走行時の第七関節の回転角度の時間変化を示すグラフである。
図8Hは実施形態のモバイルロボットの旋回走行時の第八関節の回転角度の時間変化を示すグラフである。
【発明を実施するための形態】
【0010】
以下、本開示の実施形態の一例を、図面を参照しつつ説明する。なお、各図面において同一又は実質的に同等な要素、部材及び部分には同一の参照符号を付与している。また、図面の寸法及び比率は、説明の都合上誇張されており、実際の比率とは異なる場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
充電装置
6日前
オムロン株式会社
電力開閉器
2日前
オムロン株式会社
電磁継電器
24日前
オムロン株式会社
電磁継電器
24日前
オムロン株式会社
スレーブ装置
27日前
オムロン株式会社
トリガスイッチ
23日前
オムロン株式会社
光干渉測距センサ
1か月前
オムロン株式会社
回転装置及びマウス
27日前
オムロン株式会社
電力開閉器及び電気機器
2日前
オムロン株式会社
情報取得装置、及び自動改札機
27日前
オムロン株式会社
制御装置、方法、及びプログラム
1か月前
オムロン株式会社
X線撮影システム及びX線検査装置
13日前
オムロン株式会社
解析装置、解析方法およびプログラム
10日前
オムロン株式会社
コントローラ、方法およびプログラム
2日前
オムロン株式会社
評価装置、評価方法および評価プログラム
9日前
オムロン株式会社
学習装置、操作情報変換装置及び学習方法
27日前
オムロン株式会社
協調作業システム、方法およびプログラム
27日前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
13日前
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
9日前
オムロン株式会社
信号制御システム、およびステップアップ方法
1か月前
オムロン株式会社
検査システム、検査装置、検査方法及びプログラム
11日前
オムロン株式会社
蓄電装置、蓄電システム、制御方法及びプログラム
12日前
オムロン株式会社
振動体およびこれを備えた振動ユニット、コントローラ
11日前
オムロン株式会社
文字入力装置、文字入力方法および文字入力プログラム
6日前
オムロン株式会社
軌道決定装置、軌道決定方法および軌道決定プログラム
9日前
オムロン株式会社
異物合成画像生成装置、異物合成画像生成方法及びデータ構造
11日前
オムロン株式会社
モニタリング装置、モニタリング方法、およびモニタリングプログラム
3日前
オムロン株式会社
異物ライブラリ生成装置、異物ライブラリ生成方法、分析支援装置及びデータ構造
11日前
オムロン株式会社
分散電源システム、分散電源システムにおける切替装置及び、分散電源システムにおける接続状態の切替方法
10日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
23日前
株式会社エビス
腰ベルト用連結具
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社不二越
ロボット操作装置
1か月前
東京都公立大学法人
対象物把持装置
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ