TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025076731
公報種別
公開特許公報(A)
公開日
2025-05-16
出願番号
2023188533
出願日
2023-11-02
発明の名称
評価装置、評価方法および評価プログラム
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
B25J
19/06 20060101AFI20250509BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】協調ロボットとしての挙動を評価するための新たな方法を提供する。
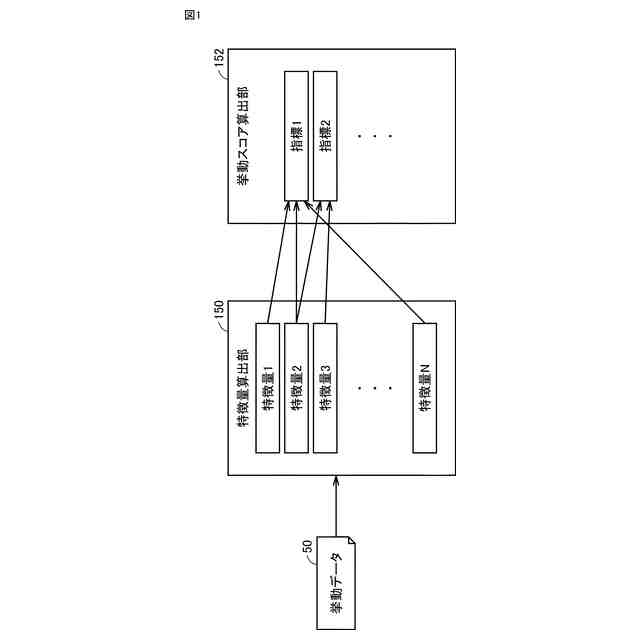
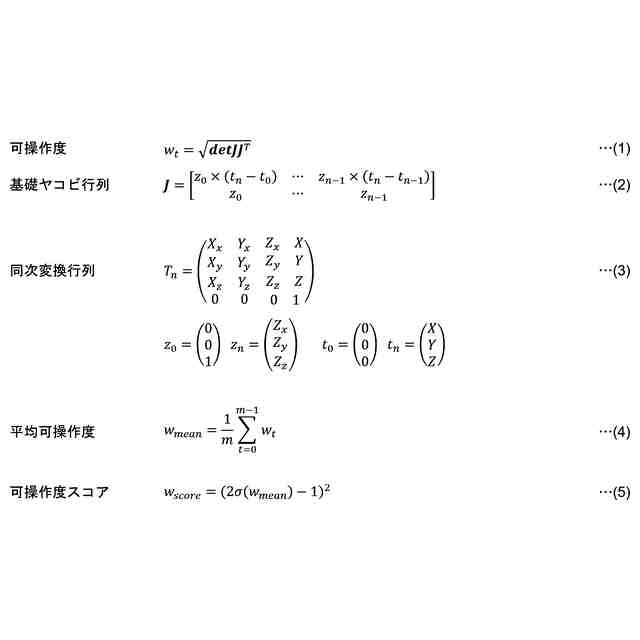
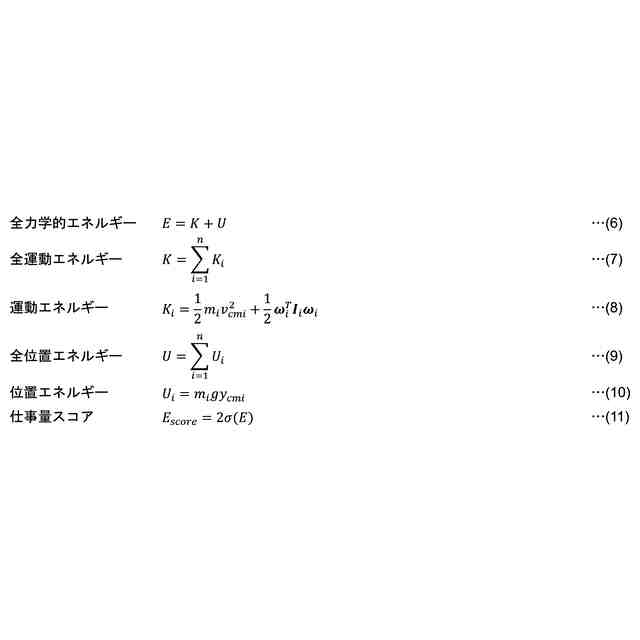
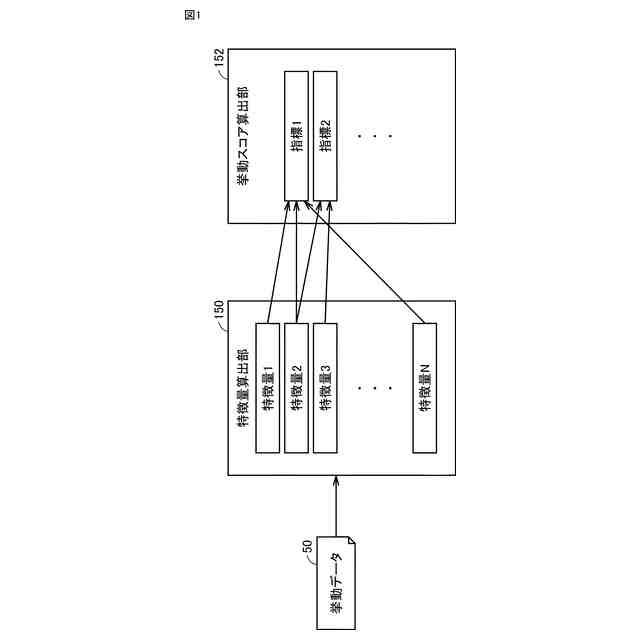
【解決手段】評価装置は、マニピュレータロボットの挙動データに基づいて、複数の特徴量を算出する第1の算出部と、複数の特徴量の少なくとも一部に基づいて、障害物に対するリスクを評価する指標と、マニピュレータロボットの作業効率を示す指標とを含む、マニピュレータロボットの挙動に関するスコアを算出する第2の算出部とを含む。
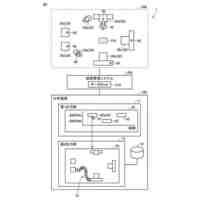
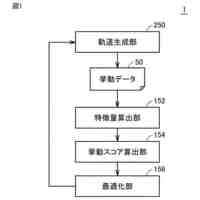
【選択図】図1
特許請求の範囲
【請求項1】
マニピュレータロボットの挙動データに基づいて、複数の特徴量を算出する第1の算出部と、
前記複数の特徴量の少なくとも一部に基づいて、障害物に対するリスクを評価する指標と、前記マニピュレータロボットの作業効率を示す指標とを含む、前記マニピュレータロボットの挙動に関するスコアを算出する第2の算出部とを備える、評価装置。
続きを表示(約 1,000 文字)
【請求項2】
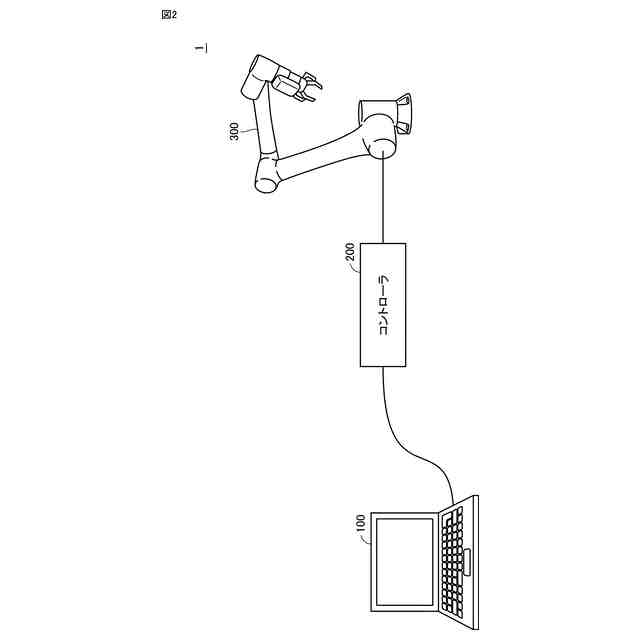
前記挙動データの生成は、前記マニピュレータロボットを実際に動作させること、および、前記マニピュレータロボットの動作に関するシミュレーションを実行することのうち、少なくとも一方に基づく、請求項1に記載の評価装置。
【請求項3】
前記挙動データは、軌道計画により事前決定された軌道の情報と、障害物に対する回避動作により変更された後の軌道の情報とを含む、請求項1または2に記載の評価装置。
【請求項4】
前記挙動データは、前記マニピュレータロボットを構成する各ジョイントの角度目標値、角度実績値、角速度目標値、角速度実績値、角加速度目標値、および、角加速度実績値のうち少なくとも一つを含む、請求項1または2に記載の評価装置。
【請求項5】
前記挙動データは、前記マニピュレータロボットが移動に要した時間を含む、請求項1または2に記載の評価装置。
【請求項6】
前記スコアを出力する出力部をさらに備え、
前記出力部は、前記スコアに含まれる各指標を視覚化したユーザインターフェイス画面を提供する、請求項1または2に記載の評価装置。
【請求項7】
前記挙動データは、複数の挙動データのうちの1つであり、
前記ユーザインターフェイス画面は、前記複数の挙動データからそれぞれ算出されたスコアを比較可能に視覚化された画像を含む、請求項6に記載の評価装置。
【請求項8】
コンピュータが実行する評価方法であって、
マニピュレータロボットの挙動データに基づいて、複数の特徴量を算出することと、
前記複数の特徴量の少なくとも一部に基づいて、障害物に対するリスクを評価する指標と、前記マニピュレータロボットの作業効率を示す指標とを含む、前記マニピュレータロボットの挙動に関するスコアを算出することとを備える、評価方法。
【請求項9】
コンピュータに、
マニピュレータロボットの挙動データに基づいて、複数の特徴量を算出することと、
前記複数の特徴量の少なくとも一部に基づいて、障害物に対するリスクを評価する指標と、前記マニピュレータロボットの作業効率を示す指標とを含む、前記マニピュレータロボットの挙動に関するスコアを算出することとを、実行させるための評価プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、マニピュレータロボットの挙動を評価する方法に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来から、マニピュレータロボットを評価する方法が存在する。
例えば、特表2021-501062号公報(特許文献1)は、テストロボットの形状を考慮した各部位別移動速度及び移動経路によって作業者に加えられる衝突圧力及び衝突力を算出し、算出された値が国際標準化機構(ISO)規格内に該当するかどうかを判断し、安全性評価の正確度が向上したロボットの安全性評価方法を開示する。
【0003】
また、特表2019-518616号公報(特許文献2)は、タスクの速度または実行時間と、タスクの産業上の収益性と、エネルギー効率性とを含むロボットの生産性ファクタのうち任意のものの最適化を可能にするための構成を開示する。
【先行技術文献】
【特許文献】
【0004】
特表2021-501062号公報
特表2019-518616号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
マニピュレータロボットの挙動を評価するためには、マニピュレータロボット自体の軌道および姿勢だけではなく、マニピュレータロボットが人に与える影響、および、マニピュレータロボットと障害物との関係を評価する必要がある。
【0006】
上述の先行技術文献は、マニピュレータロボット自体を評価する方法を開示するのみであり、マニピュレータロボットの挙動を評価する方法を開示するものではない。
【0007】
本発明は、マニピュレータロボットの挙動を評価するための新たな方法を提供することを一つの目的とする。
【課題を解決するための手段】
【0008】
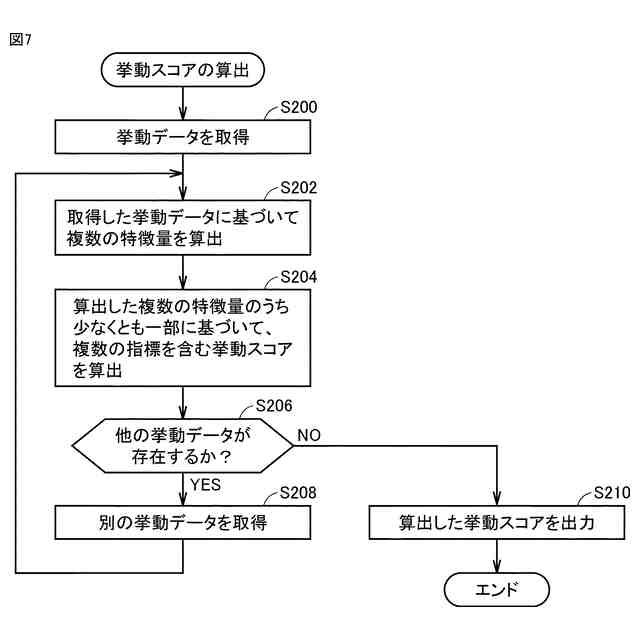
本発明の一例に従う評価装置は、マニピュレータロボットの挙動データに基づいて、複数の特徴量を算出する第1の算出部と、複数の特徴量の少なくとも一部に基づいて、障害物に対するリスクを評価する指標と、マニピュレータロボットの作業効率を示す指標とを含む、マニピュレータロボットの挙動に関するスコアを算出する第2の算出部とを含む。
【0009】
この構成によれば、挙動データから算出された複数の特徴量の少なくとも一部に基づいて、複数の指標を含むスコアが算出されるので、マニピュレータロボットの挙動をより適切に評価できる。
【0010】
挙動データの生成は、マニピュレータロボットを実際に動作させること、および、マニピュレータロボットの動作に関するシミュレーションを実行することのうち、少なくとも一方に基づいてもよい。この構成によれば、スコアを算出するための挙動データを一つ以上の方法で生成できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
安全装置
3日前
オムロン株式会社
充電装置
1か月前
オムロン株式会社
ロボット
23日前
オムロン株式会社
操作装置
13日前
オムロン株式会社
ロボット
23日前
オムロン株式会社
電力開閉器
1か月前
オムロン株式会社
電力変換装置
24日前
オムロン株式会社
撮影システム
26日前
オムロン株式会社
電力変換装置
24日前
オムロン株式会社
電力変換装置
24日前
オムロン株式会社
電力変換装置
24日前
オムロン株式会社
電力変換装置
24日前
オムロン株式会社
電力変換装置
24日前
オムロン株式会社
電磁ロック装置
4日前
オムロン株式会社
ソリッドステートリレー
23日前
オムロン株式会社
電力開閉器及び電気機器
1か月前
オムロン株式会社
車椅子用治具および車椅子
3日前
オムロン株式会社
車椅子用治具および車椅子
3日前
オムロン株式会社
電力変換装置及び電力変換システム
24日前
オムロン株式会社
分析装置、分析方法およびプログラム
24日前
オムロン株式会社
コントローラ、方法およびプログラム
1か月前
オムロン株式会社
制御装置、制御方法及び制御プログラム
5日前
オムロン株式会社
風計測装置およびこれを備えた気象センサ
10日前
オムロン株式会社
監視装置、監視方法および監視プログラム
26日前
オムロン株式会社
雨滴検出装置およびこれを備えた気象センサ
27日前
オムロン株式会社
ロボットシステム、制御装置および制御方法
1か月前
オムロン株式会社
風計測装置、風計測方法および風計測プログラム
10日前
オムロン株式会社
操作端末、操作支援方法、及び操作支援プログラム
24日前
オムロン株式会社
操作端末、操作支援方法、及び操作支援プログラム
24日前
オムロン株式会社
運行管理システム、管理装置、方法、及びプログラム
19日前
オムロン株式会社
作業支援装置、作業支援方法および作業支援プログラム
24日前
オムロン株式会社
文字入力装置、文字入力方法および文字入力プログラム
1か月前
オムロン株式会社
軌道決定装置、軌道決定方法および軌道決定プログラム
1か月前
オムロン株式会社
スイッチ
19日前
オムロン株式会社
情報収集装置、情報提供装置、情報収集方法及び情報提供方法
20日前
オムロン株式会社
ナレッジ管理装置、ナレッジ管理方法およびナレッジ管理プログラム
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ