TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025086821
公報種別
公開特許公報(A)
公開日
2025-06-09
出願番号
2023201124
出願日
2023-11-28
発明の名称
情報収集装置、情報提供装置、情報収集方法及び情報提供方法
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
G06F
16/903 20190101AFI20250602BHJP(計算;計数)
要約
【課題】時系列データを抽出する精度の向上を図るための技術を提供する。
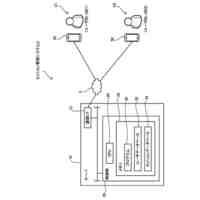
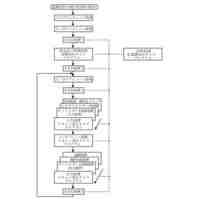
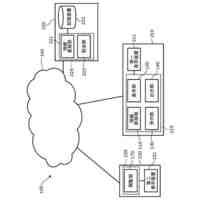
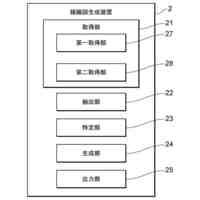
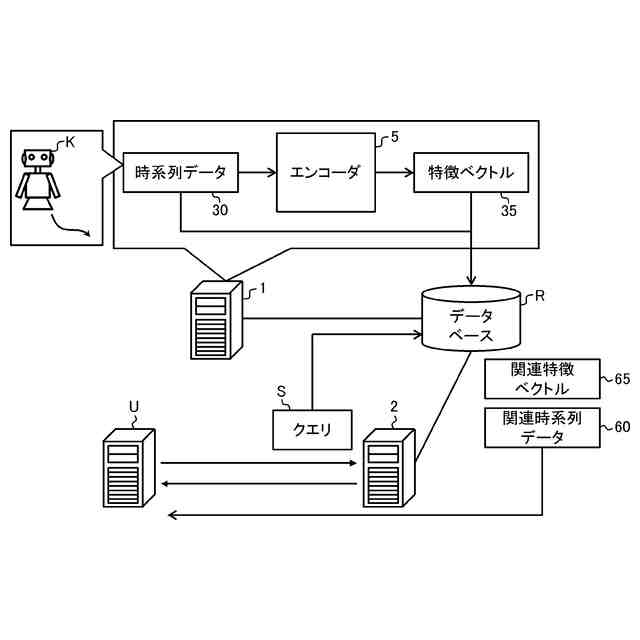
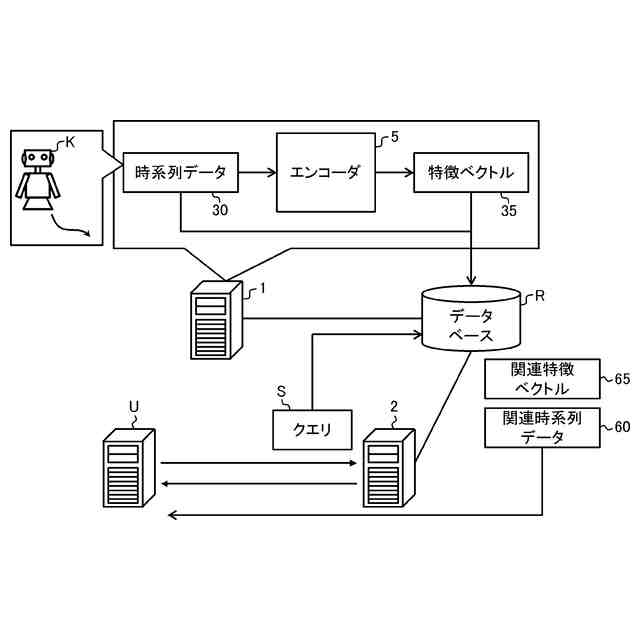
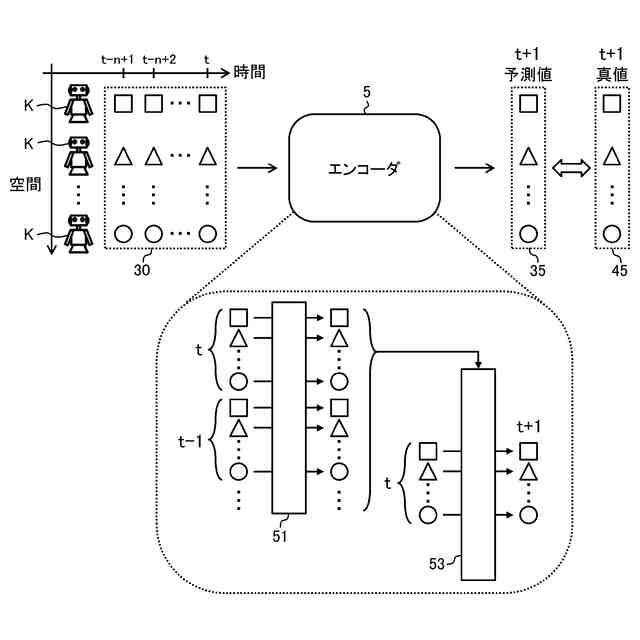
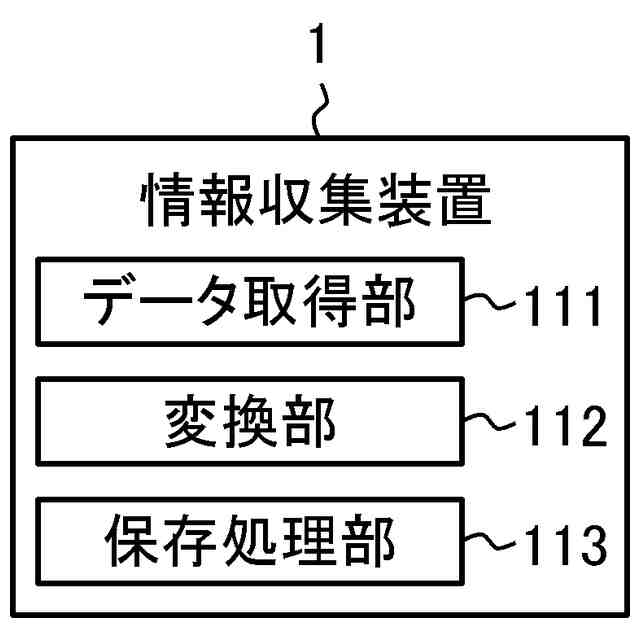
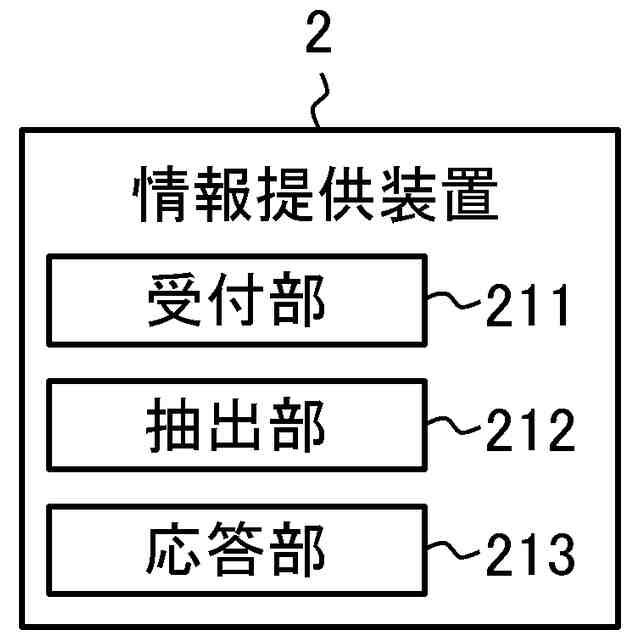
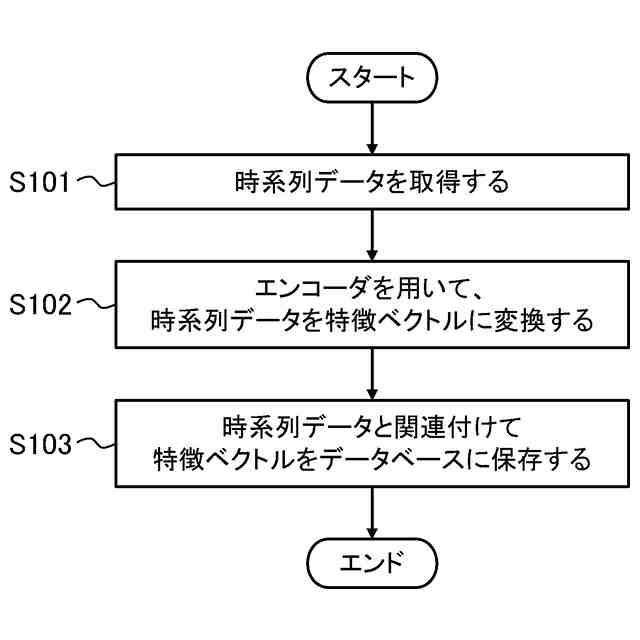
【解決手段】本発明の一側面に係る情報収集装置は、1以上のエージェントの状態遷移を示す時系列データを取得し、複数の時刻の情報を織り込んで符号化するように構成されたエンコーダを用いて、取得された時系列データを特徴ベクトルに変換し、得られた特徴ベクトルを時系列データと関連付けてデータベースに保存する。情報提供装置は、依頼元からクエリを受け付け、クエリに適合する特徴ベクトルを関連特徴ベクトルとしてデータベースから抽出し、抽出された関連特徴ベクトルに関連付けられた時系列データを関連時系列データとして依頼元に返す。
【選択図】図1
特許請求の範囲
【請求項1】
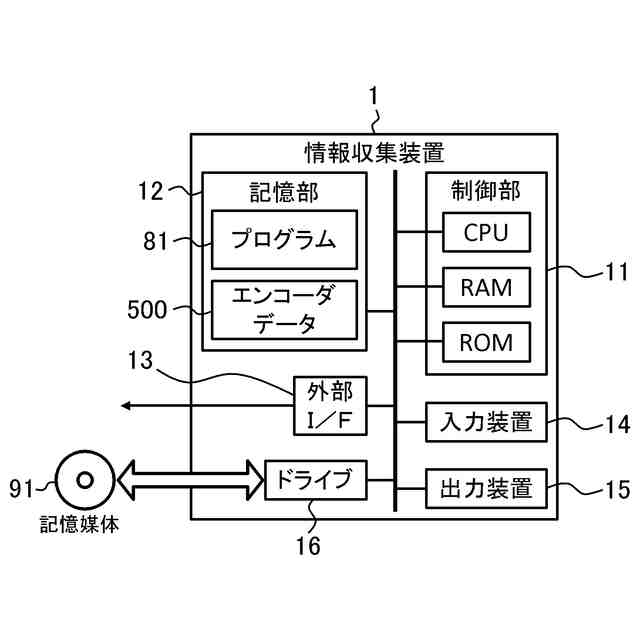
制御部を備える情報収集装置であって、
前記制御部は、
1以上のエージェントの状態遷移を示す時系列データを取得すること、
複数の時刻の情報を織り込んで符号化するように構成されたエンコーダを用いて、取得された前記時系列データを特徴ベクトルに変換すること、及び
得られた前記特徴ベクトルを前記時系列データと関連付けてデータベースに保存すること、
を実行するように構成される、
情報収集装置。
続きを表示(約 1,000 文字)
【請求項2】
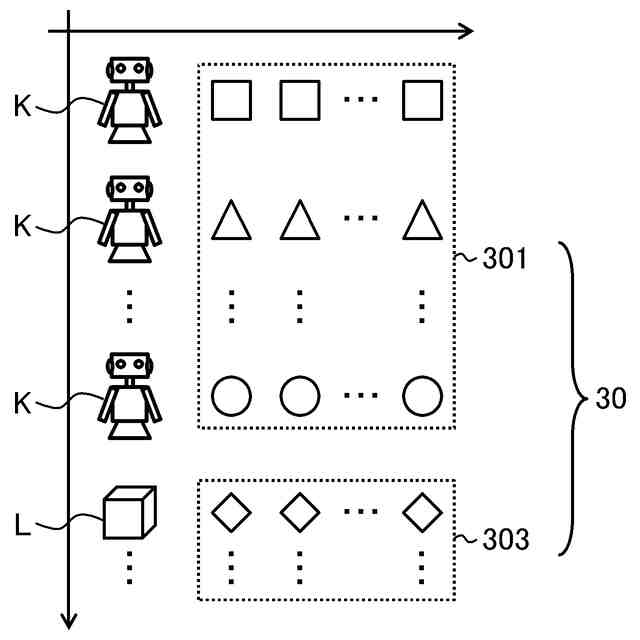
前記時系列データは、複数の前記エージェントの状態遷移を示すように構成され、
前記エンコーダは、空間の情報を更に織り込んで符号化するように構成される、
請求項1に記載の情報収集装置。
【請求項3】
前記エンコーダは、1以上のエージェントの状態遷移からその未来の状態を予測するように訓練されることで、複数の時刻の情報を織り込んで符号化するように構成される、
請求項1に記載の情報収集装置。
【請求項4】
前記時系列データは、軌跡データを含む、
請求項1に記載の情報収集装置。
【請求項5】
前記時系列データは、動画像データを含む、
請求項1に記載の情報収集装置。
【請求項6】
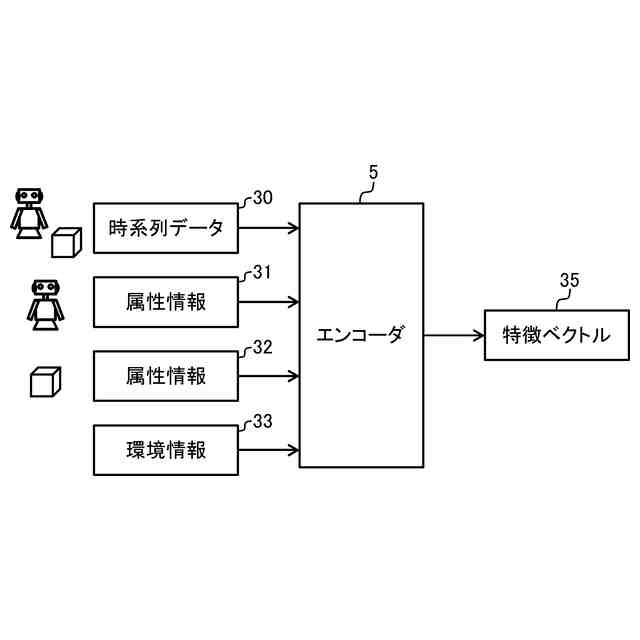
前記制御部は、前記1以上のエージェントの属性情報を更に取得するように構成され、
取得された前記時系列データを特徴ベクトルに変換することは、取得された前記時系列データ及び前記1以上のエージェントの前記属性情報を特徴ベクトルに変換することにより構成される、
請求項1に記載の情報収集装置。
【請求項7】
前記時系列データは、1以上のオブジェクトの状態遷移を更に示すように構成され、
前記エンコーダは、空間の情報を更に織り込んで符号化するように構成される、
請求項1に記載の情報収集装置。
【請求項8】
前記制御部は、前記1以上のオブジェクトの属性情報を更に取得するように構成され、
取得された前記時系列データを特徴ベクトルに変換することは、取得された前記時系列データ及び前記1以上のオブジェクトの前記属性情報を特徴ベクトルに変換することにより構成される、
請求項7に記載の情報収集装置。
【請求項9】
前記制御部は、前記1以上のエージェントの存在する環境に関する環境情報を更に取得するように構成され、
取得された前記時系列データを特徴ベクトルに変換することは、取得された前記時系列データ及び前記環境情報を特徴ベクトルに変換することにより構成される、
請求項1に記載の情報収集装置。
【請求項10】
前記エージェントは、ロボット装置又は生物である、
請求項1に記載の情報収集装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報収集装置、情報提供装置、情報収集方法及び情報提供方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、ロボット装置の制御モデルを機械学習により生成する様々な手法が開発されている。その機械学習では、事前に収集されたデータを用いることがある。例えば、模倣学習では、事前に収集されたデモンストレーションデータ(教示データ)を用いて、方策の学習が行われる。また、例えば、強化学習において、事前に収集されたデータをエピソードとして用いることがある。その他、教師あり学習及び教師なし学習でも、事前に収集されたデータを用いて、モデルの学習が行われる。しかしながら、このようなデータをタスク毎に個々に収集するのはコストがかかる。
【0003】
そこで、事前に大規模に収集されたデータから適合的なデータを選択し、選択されたデータを機械学習に用いる手法が検討されている。例えば、非特許文献1では、オフライン強化学習において、画像検索により得られるデータを用いる手法が提案されている。この方法によれば、データの再利用性が高まるため、対象環境又は対象タスクで新規なデータを収集するコストの低減を期待することができる。
【先行技術文献】
【非特許文献】
【0004】
Peter C. Humphreys et al., “Large-Scale Retrieval for Reinforcement Learning”, [online], [令和5年11月17日検索], インターネット<URL:https://arxiv.org/abs/2206.05314>
【発明の概要】
【発明が解決しようとする課題】
【0005】
本件発明者らは、上記従来の方法には、次のような問題点があることを見出した。すなわち、ロボット装置の動作制御では、行動系列を考慮することになる。これに対して、従来の方法では、1時刻の画像データが検索の対象である。そのため、検索において、見た目の類似度しか参照されず、行動系列を考慮した検索が困難である。繰り返し検索を行い、得られたデータを時系列につなぎ合わせることで、行動系列に対応する時系列データを生成することは可能である。しかしながら、生成される時系列データは関連性の低いデータを含む可能性があるため、行動系列に対応する時系列データを抽出する精度は悪くなる可能性が高い。
【0006】
したがって、従来の方法では、ロボット装置の行動系列に対応する時系列データを精度よく抽出することが困難であった。なお、このような問題点が生じるのは、機械学習に用いるデータを検索する場面に限られない。時系列データを検索するあらゆる場面にこの問題点は生じ得る。例えば、ロボット装置の所望の動作に類似する動作を検索する等のデータを単に検索する場面でも、このような問題点は生じ得る。
【0007】
本発明は、一側面では、このような事情を鑑みてなされたものであり、その目的は、時系列データを抽出する精度の向上を図るための技術を提供することである。
【課題を解決するための手段】
【0008】
本発明は、上述した課題を解決するために、以下の構成を採用する。なお、以下の発明の構成は適宜組み合わせ可能である。
【0009】
本発明の一側面に係る情報収集装置は制御部を備える。前記制御部は、1以上のエージェントの状態遷移を示す時系列データを取得すること、複数の時刻の情報を織り込んで符号化するように構成されたエンコーダを用いて、取得された前記時系列データを特徴ベクトルに変換すること、及び得られた前記特徴ベクトルを前記時系列データと関連付けてデータベースに保存することを実行するように構成される。
【0010】
当該構成では、エンコーダにより、時系列データに含まれる複数の時刻の情報が特徴ベクトルに織り込まれる。生成された特徴ベクトルは、時系列データに関連付けられて保存される。この特徴ベクトルをメタ情報(タグ)として検索に用いることで、その検索において、状態遷移の系列を考慮することができ、これにより、検索対象の系列に対する適切な時系列データの抽出を期待することができる。したがって、当該構成によれば、1以上のエージェントの状態遷移を示す時系列データを抽出する精度の向上を期待することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
安全装置
4日前
オムロン株式会社
電磁ロック装置
5日前
オムロン株式会社
車椅子用治具および車椅子
4日前
オムロン株式会社
車椅子用治具および車椅子
4日前
個人
対話装置
18日前
個人
政治のAI化
1か月前
個人
情報処理装置
18日前
個人
物品給付年金
1か月前
個人
情報処理装置
14日前
個人
記入設定プラグイン
6日前
個人
プラグインホームページ
1か月前
個人
情報入力装置
18日前
個人
物価スライド機能付生命保険
18日前
個人
マイホーム非電子入札システム
18日前
株式会社BONNOU
管理装置
11日前
キヤノン株式会社
画像処理装置
1か月前
個人
全アルゴリズム対応型プログラム
1か月前
サクサ株式会社
カードの制動構造
20日前
個人
決済手数料0%のクレジットカード
21日前
シャープ株式会社
電子機器
1か月前
大同特殊鋼株式会社
輝線検出方法
1か月前
株式会社ライト
情報処理装置
11日前
パテントフレア株式会社
交差型バーコード
1か月前
トヨタ自動車株式会社
欠け検査装置
1か月前
ミサワホーム株式会社
宅配ロッカー
1か月前
株式会社アジラ
データ転送システム
1か月前
村田機械株式会社
割当補助システム
24日前
トヨタ自動車株式会社
情報処理装置
24日前
応研株式会社
業務支援システム
1か月前
トヨタ自動車株式会社
管理装置
1か月前
住友重機械工業株式会社
力覚伝達装置
13日前
オベック実業株式会社
端末用スタンド
1か月前
Sansan株式会社
組織図生成装置
27日前
株式会社半導体エネルギー研究所
会計システム
4日前
株式会社mov
情報処理システム
18日前
株式会社カプコン
データおよびシステム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ