TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025093694
公報種別
公開特許公報(A)
公開日
2025-06-24
出願番号
2023209502
出願日
2023-12-12
発明の名称
制御装置、制御方法及び制御プログラム
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
G06V
10/34 20220101AFI20250617BHJP(計算;計数)
要約
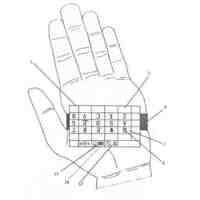
【課題】身体部位に合わせて複数のロボット装置を制御する際に、ロボット装置同士が衝突する可能性を低減するための群ロボットの制御技術を提供する。
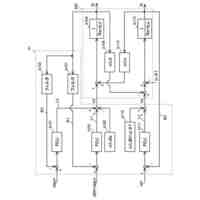
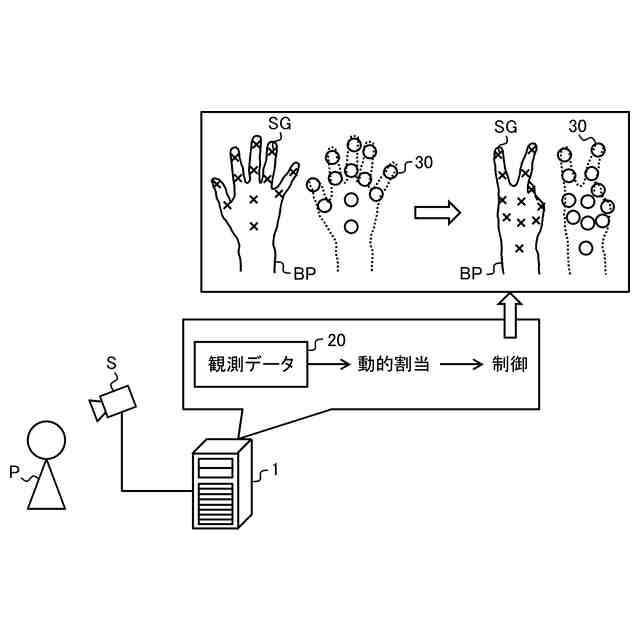
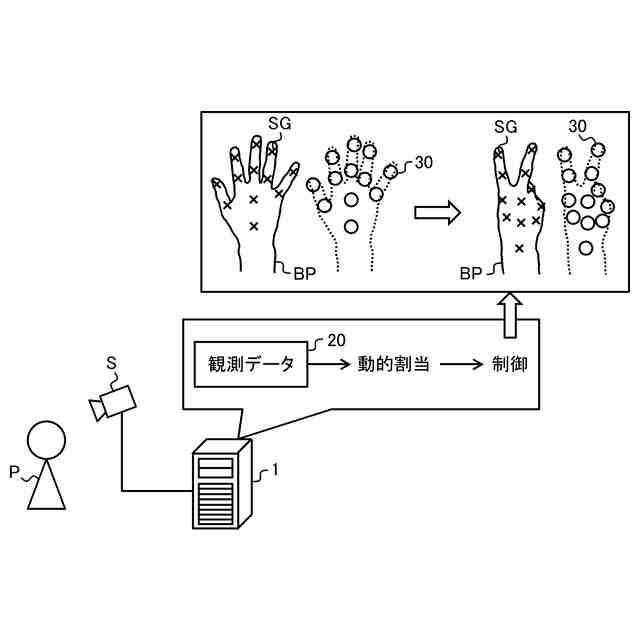
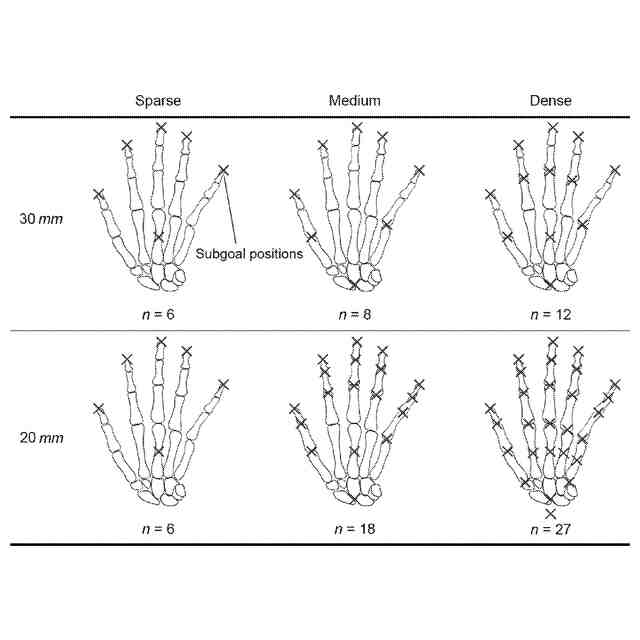
【解決手段】本発明の一側面に係る制御装置は、オペレータの身体部位の観測データを取得し、取得された観測データに表れる身体部位に応じた複数のサブゴール位置それぞれを複数のロボット装置それぞれに動的に割り当て、かつ割り当てられた複数のサブゴール位置それぞれに向けて、複数のロボット装置それぞれの動作を制御する。
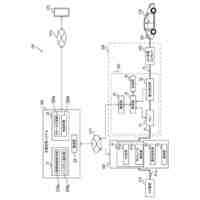
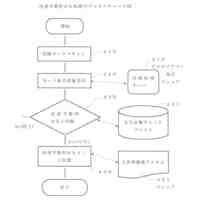
【選択図】図1
特許請求の範囲
【請求項1】
制御部を備える制御装置であって、
前記制御部は、
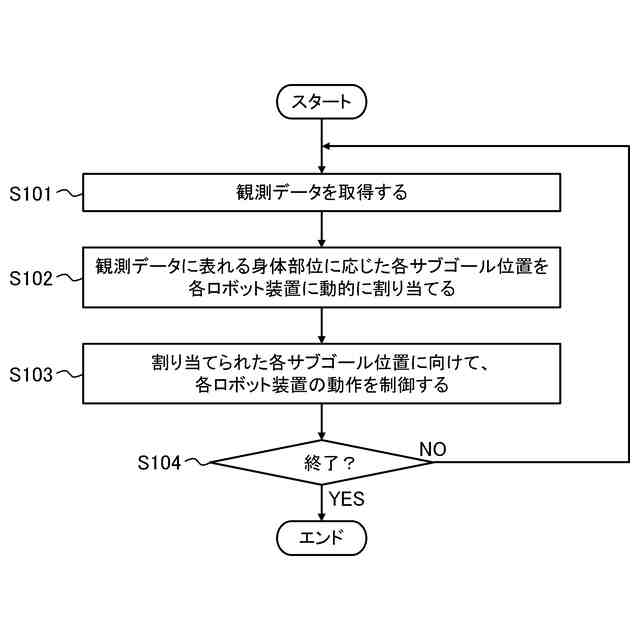
オペレータの身体部位の観測データを取得すること、
取得された前記観測データに表れる前記身体部位に応じた複数のサブゴール位置それぞれを複数のロボット装置それぞれに動的に割り当てること、及び
割り当てられた前記複数のサブゴール位置それぞれに向けて、前記複数のロボット装置それぞれの動作を制御すること、
を実行するように構成される、
制御装置。
続きを表示(約 880 文字)
【請求項2】
前記複数のサブゴール位置それぞれを前記複数のロボット装置それぞれに動的に割り当てることは、
取得された前記観測データにおいて、前記身体部位の複数の対象点を特定すること、
特定された前記複数の対象点に応じて、前記複数のサブゴール位置を決定すること、及び
決定された前記複数のサブゴール位置それぞれを前記複数のロボット装置それぞれに動的に割り当てること、
により構成される、
請求項1に記載の制御装置。
【請求項3】
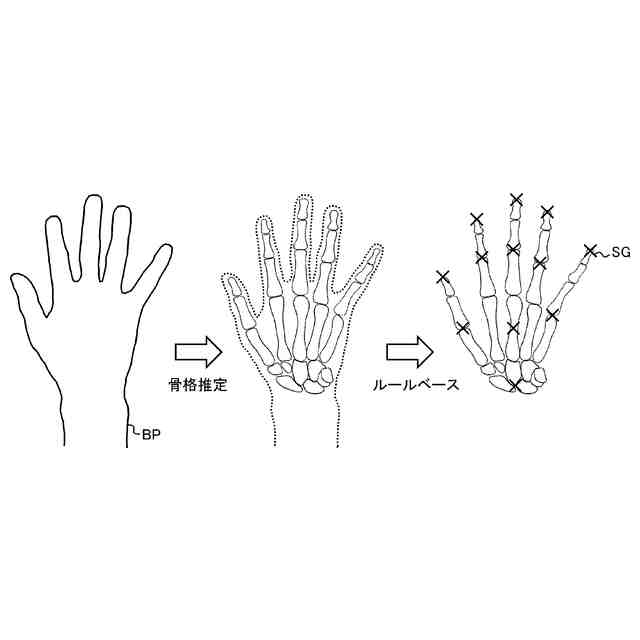
前記複数の対象点を特定することは、前記身体部位のシルエットに応じて、前記複数の対象点を特定することにより構成される、
請求項2に記載の制御装置。
【請求項4】
前記複数の対象点を特定することは、前記身体部位の特徴に応じて、前記複数の対象点を特定することにより構成される、
請求項2に記載の制御装置。
【請求項5】
前記複数のロボット装置それぞれの動作を制御することは、
前記各サブゴール位置に移動するパスを前記ロボット装置毎に計画すること、及び
計画された前記パスに従って、前記各ロボット装置の動作を制御すること、
により構成される、
請求項1に記載の制御装置。
【請求項6】
前記観測データは、画像データを含む、
請求項1に記載の制御装置。
【請求項7】
前記観測データは、モーションキャプチャデータを含む、
請求項1に記載の制御装置。
【請求項8】
前記各ロボット装置は、移動する能力を有する自律ロボットである、
請求項1に記載の制御装置。
【請求項9】
前記各ロボット装置は、移動する能力を有する移動体である、
請求項1に記載の制御装置。
【請求項10】
前記移動体は、ドローンである、
請求項9に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御方法及び制御プログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、ロボット装置を制御する様々な手法が開発されている。例えば、非特許文献1には、複数のロボット装置(群ロボット)の動作を身体(例えば、手)の状態に合わせて制御することにより、群ロボットを身体化する手法が提案されている。このような手法によれば、直感的な操作により、複数のロボット装置を制御することができる。
【先行技術文献】
【非特許文献】
【0003】
中川雅人、柏野善大、吉田成朗、稲見昌彦, “群ロボットの身体化に関する予備検討”, [online], [令和5年11月29日検索], インターネット<URL:https://conference.vrsj.org/ac2021/program/doc/2C1-5.pdf>
【発明の概要】
【発明が解決しようとする課題】
【0004】
本件発明者らは、上記従来の方法には、次のような問題点があることを見出した。すなわち、上記従来の手法では、各ロボット装置のサブゴール位置は、身体の特徴点に1対1で静的に割り当てられる。これにより、各ロボット装置と身体の特徴点との関係が固定されるため、身体の向きが変わる、ひっくり返る等の場面で、ロボット装置同士の衝突が生じやすく、衝突を回避するための制御が複雑になるという問題点が生じ得る。
【0005】
本発明は、一側面では、このような事情を鑑みてなされたものであり、その目的は、身体部位に合わせて複数のロボット装置を制御する際に、ロボット装置同士が衝突する可能性を低減するための制御技術を提供することである。
【課題を解決するための手段】
【0006】
本発明は、上述した課題を解決するために、以下の構成を採用する。なお、以下の発明の構成は適宜組み合わせ可能である。
【0007】
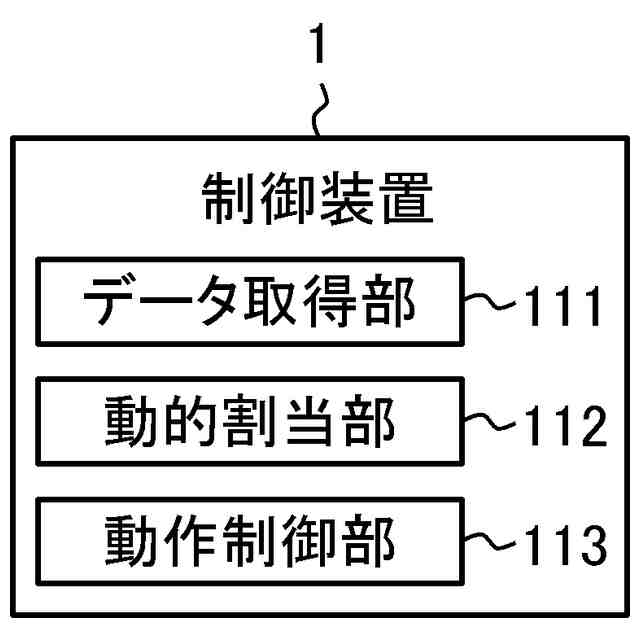
本発明の一側面に係る制御装置は制御部を備える。前記制御部は、オペレータの身体部位の観測データを取得すること、取得された前記観測データに表れる前記身体部位に応じた複数のサブゴール位置それぞれを複数のロボット装置それぞれに動的に割り当てること、及び割り当てられた前記複数のサブゴール位置それぞれに向けて、前記複数のロボット装置それぞれの動作を制御することを実行するように構成される。
【0008】
当該構成では、身体部位に応じた各サブゴール位置は、各ロボット装置に対して動的に割り当てられる。これにより、各ロボット装置と身体部位との関係は固定されないため、例えば、最も近いサブゴール位置を割り当てる等の単純な方法でも、ロボット装置同士の衝突の回避を期待することができる。したがって、当該構成によれば、身体部位に合わせて複数のロボット装置を制御する際、ロボット装置同士が衝突する可能性を低減することができる。
【0009】
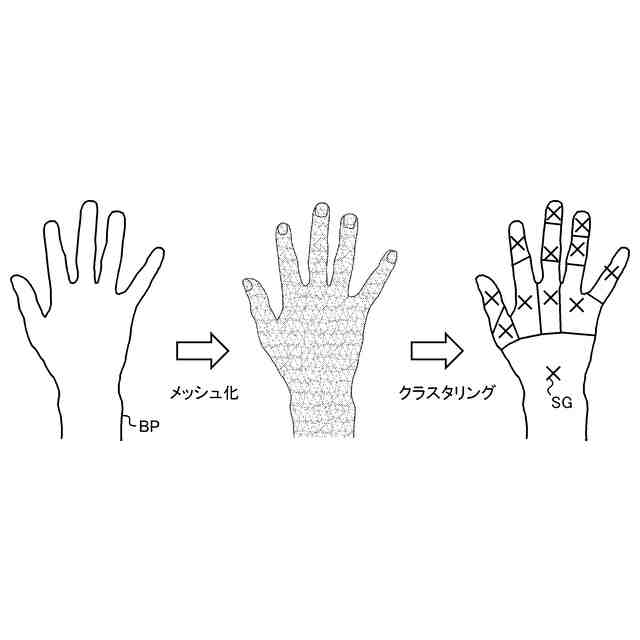
上記一側面に係る制御装置において、前記複数のサブゴール位置それぞれを前記複数のロボット装置それぞれに動的に割り当てることは、取得された前記観測データにおいて、前記身体部位の複数の対象点を特定すること、特定された前記複数の対象点に応じて、前
記複数のサブゴール位置を決定すること、及び決定された前記複数のサブゴール位置それぞれを前記複数のロボット装置それぞれに動的に割り当てることにより構成されてよい。当該構成によれば、各サブゴール位置の決定及び各ロボット装置への割り当てを適切に行うことができる。
【0010】
上記一側面に係る制御装置において、前記複数の対象点を特定することは、前記身体部位のシルエットに応じて、前記複数の対象点を特定することにより構成されてよい。当該構成によれば、観測される身体部位に応じて各サブゴール位置を適切に設定することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
ドライバ
12日前
オムロン株式会社
電磁継電器
14日前
オムロン株式会社
スイッチ装置
11日前
オムロン株式会社
シート検査装置
12日前
オムロン株式会社
処理方法、及び処理装置
12日前
オムロン株式会社
充電システム及びモジュール
11日前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
12日前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
11日前
オムロン株式会社
設定確認端末、駅務機器、および設定確認方法
6日前
個人
対話装置
1か月前
個人
情報処理装置
1か月前
個人
裁判のAI化
4日前
個人
情報処理システム
11日前
個人
記入設定プラグイン
27日前
個人
情報処理装置
1か月前
個人
検査システム
13日前
キヤノン電子株式会社
携帯装置
12日前
個人
情報入力装置
1か月前
個人
不動産売買システム
19日前
株式会社サタケ
籾摺・調製設備
12日前
個人
物価スライド機能付生命保険
1か月前
個人
備蓄品の管理方法
11日前
個人
マイホーム非電子入札システム
1か月前
サクサ株式会社
中継装置
12日前
株式会社BONNOU
管理装置
1か月前
キヤノン株式会社
情報処理装置
12日前
キヤノン株式会社
情報処理装置
12日前
キヤノン電子株式会社
名刺管理システム
13日前
アスエネ株式会社
排水量管理方法
12日前
東洋電装株式会社
操作装置
12日前
個人
決済手数料0%のクレジットカード
1か月前
株式会社ワコム
電子消去具
19日前
ホシデン株式会社
タッチ入力装置
19日前
サクサ株式会社
カードの制動構造
1か月前
株式会社東芝
電子機器
20日前
東洋電装株式会社
操作装置
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ