TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103548
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221002
出願日
2023-12-27
発明の名称
ドライバ
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
H02P
25/16 20060101AFI20250702BHJP(電力の発電,変換,配電)
要約
【課題】外部装置への給電のために、モータ駆動のための駆動電力に外部装置への供給電力を重畳する場合、その重畳電力を好適に制御する。
【解決手段】外部から供給された電力の一部を抽出する抽出部と、該抽出部により抽出された電力を外部装置に供給する供給部と、を備えるモータに対して、又は、該抽出部と該供給部が設けられたモータ用動力線に対して、駆動電力を供給するドライバであって、第1フィードバック系を有し、該モータへの供給電流のうち該モータの駆動に関連する駆動電流をフィードバック制御可能に構成された第1制御部と、第2フィードバック系を有し、該モータへの供給電流のうち外部装置へ供給される電力に対応する追加電流を生成するためのフィードバック制御が可能に構成された第2制御部と、駆動電流に追加電流を重畳して出力する出力部と、を備える。
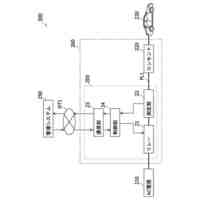
【選択図】図8
特許請求の範囲
【請求項1】
外部から供給された電力の一部を抽出する抽出部と、該抽出部により抽出された電力を外部装置に供給する供給部と、を備えるモータに対して、又は、該抽出部と該供給部が設けられたモータ用動力線に対して、電力を供給するドライバであって、
前記モータの動作に関連するフィードバック信号が入力される一又は複数の第1制御器を含む第1フィードバック系を有し、該モータへの供給電流のうち該モータの駆動に関連する駆動電流をフィードバック制御可能に構成された第1制御部と、
前記フィードバック信号のうち少なくとも一部が入力される一又は複数の第2制御器を含み前記第1フィードバック系とは異なるように形成された第2フィードバック系を有し、該モータへの供給電流のうち前記外部装置へ供給される電力に対応する追加電流を生成するためのフィードバック制御が可能に構成された第2制御部と、
前記第1制御部を介して生成された前記駆動電流に、前記第2制御部を介して生成された前記追加電流を重畳して、前記モータに対して供給電力を出力する出力部と、
を備える、ドライバ。
続きを表示(約 1,400 文字)
【請求項2】
前記第1制御部の前記第1フィードバック系は、前記モータの回転速度に基づいて設定された第1カットオフ周波数を有するローパスフィルタを、更に有し、
前記第2制御部の前記第2フィードバック系は、前記抽出部による電力抽出に関連して設定された第2カットオフ周波数を有するハイパスフィルタを、更に有する、
請求項1に記載のドライバ。
【請求項3】
前記第1制御部は、前記モータの駆動のためのq軸電流及びd軸電流に関連するフィードバック制御が可能となるように構成され、
前記第2制御部は、前記外部装置への電力供給のための前記追加電流としてのd軸電流に関連するフィードバック制御が可能となるように構成され、
前記出力部は、前記第1制御部によって導出された前記モータの駆動のためのd軸電流に、前記第2制御部によって導出された前記追加電流としてのd軸電流を重畳して、前記モータへの供給電力を出力する、
請求項1又は請求項2に記載のドライバ。
【請求項4】
前記追加電流としてのd軸電流は、時間経過とともに電流値が変動する要素を含む、
請求項3に記載のドライバ。
【請求項5】
前記追加電流としてのd軸電流が含む前記変動する要素の周波数は、前記モータの最大回転速度に対応する周波数より高い値である、
請求項4に記載のドライバ。
【請求項6】
前記第1制御部は、前記モータの駆動のためのq軸電流及びd軸電流に関連するフィードバック制御が可能となるように構成され、
前記第2制御部は、前記外部装置への電力供給のための前記追加電流としてのq軸電流に関連するフィードバック制御が可能となるように構成され、
前記出力部は、前記第1制御部によって導出された前記モータの駆動のためのq軸電流に、前記第2制御部によって導出された前記追加電流としてのq軸電流を重畳して、前記モータへの供給電力を出力する、
請求項1又は請求項2に記載のドライバ。
【請求項7】
前記追加電流としてのq軸電流は、時間経過とともに電流値が変動する要素を含む、
請求項6に記載のドライバ。
【請求項8】
前記追加電流としてのq軸電流が含む前記変動する要素の周波数は、前記モータの最大回転速度に対応する周波数より高い値である、
請求項7に記載のドライバ。
【請求項9】
前記第2制御部は、更に、前記外部装置への電力供給のための前記追加電流としてのq軸電流に関連するフィードバック制御が可能となるように構成され、
前記出力部は、前記第1制御部によって導出された前記モータの駆動のためのd軸電流に、前記第2制御部によって導出された前記追加電流としてのd軸電流を重畳し、且つ、該第1制御部によって導出された前記モータの駆動のためのq軸電流に、該第2制御部によって導出された該追加電流としてのq軸電流を重畳して、前記モータへの供給電力を出力する、
請求項3に記載のドライバ。
【請求項10】
前記追加電流としてのd軸電流は、時間経過とともに電流値が変動する要素を含む、
請求項9に記載のドライバ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ドライバに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
様々な目的で負荷を駆動するためのモータにとって、その制御を正確に実行するためにはモータの状態を把握する必要があり、一般にはエンコーダ等の検出装置が利用されている。エンコーダを駆動するためには電力を供給しなければならないが、一般には、サーボシステム(例えば、ドライバ)等とエンコーダとをケーブルで結び、そのケーブルを介して電力供給を行う場合がある。また、別法として、特許文献1には、サーボシステム側と無線通信を行うエンコーダに対して、その電力を外部から無線で供給する構成が開示されている。
【0003】
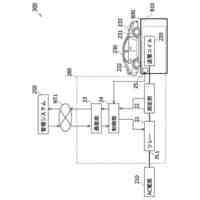
また、特許文献2には、モータの駆動電力にエンコーダ等の外部装置の駆動に必要な電力を重畳させて一度モータに供給し、その後、モータで供給電力の一部を抽出して外部装置に電力供給を行う構成が開示されている。当該技術では、モータの駆動電流におけるd軸電流値を調整することで外部装置のための供給電力の重畳が行われる。
【先行技術文献】
【特許文献】
【0004】
特開2001-297389号公報
国際公開第2022/186200号
【発明の概要】
【発明が解決しようとする課題】
【0005】
モータに取り付けられるエンコーダで消費される電力は、モータでの消費電力と比べると小さいものの、駆動するモータの状態を常にモニターする必要があるため、安定した電力供給が求められる。有線ケーブルでエンコーダとモータのドライバをつなぐことで電力供給を行うのが一般であるが、その場合、モータの動力線に加えて、エンコーダに関するケーブルを配線する必要があり、配線の作業負荷の増加やケーブルに起因するコスト増加等が生じ得る。
【0006】
また、エンコーダ等の外部装置への電力供給の形態において、先行技術において開示されているように、モータ駆動のための駆動電力に外部装置への供給電力を重畳する場合、外部装置への給電を安定的に維持するために、重畳する電力を好適に制御したい。しかし、モータ駆動のための制御と外部装置への電力供給のための制御が共通のフィードバック制御ブロックで実行されると、各制御に適した重畳電力の制御が必ずしも好適に行われるとは限らない。
【0007】
本発明は、このような問題に鑑みてなされたものであり、外部装置への給電のために、モータ駆動のための駆動電力に外部装置への供給電力を重畳する場合、その重畳電力を好適に制御する技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
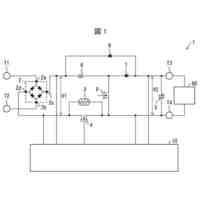
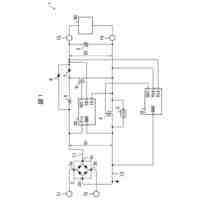
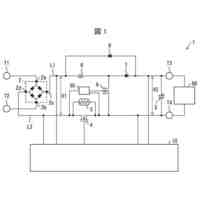
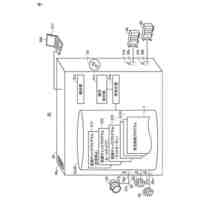
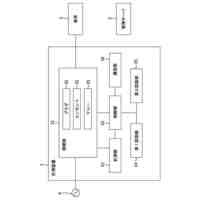
本願開示のドライバは、外部から供給された電力の一部を抽出する抽出部と、該抽出部により抽出された電力を外部装置に供給する供給部と、を備えるモータに対して、又は、該抽出部と該供給部が設けられたモータ用動力線に対して、電力を供給するように構成される。そして、当該ドライバは、前記モータの動作に関連するフィードバック信号が入力
される一又は複数の第1制御器を含む第1フィードバック系を有し、該モータへの供給電流のうち該モータの駆動に関連する駆動電流をフィードバック制御可能に構成された第1制御部と、前記フィードバック信号のうち少なくとも一部が入力される一又は複数の第2制御器を含み前記第1フィードバック系とは異なるように形成された第2フィードバック系を有し、該モータへの供給電流のうち前記外部装置へ供給される電力に対応する追加電流を生成するためのフィードバック制御が可能に構成された第2制御部と、前記第1制御部を介して生成された前記駆動電流に、前記第2制御部を介して生成された前記追加電流を重畳して、前記モータに対して供給電力を出力する出力部と、を備える。
【0009】
上記モータは、単相の交流モータでもよく三相の交流モータでもよい。また、モータの巻線部でのコイルの結線態様は、いわゆるデルタ結線でもよくスター結線(もしくはY結線)でもよい。また、モータのステータに対する巻線部のコイルの巻き方については、分布巻きでも集中巻きでもよい。すなわち、本発明のモータにおいて、巻線部の具体的な形成については、特段に制限する意図は無い。
【0010】
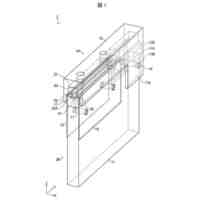
そして、抽出部はモータの巻線部やモータとドライバを繋ぐ動力線に対して、電力を抽出可能となるように配置される限りにおいて、抽出部の具体的な形態や構成は特定の態様に限定されるものではない。例えば、前記抽出部は、モータの巻線部や動力線に対して、それらに供給されている電力の一部がその一次コイルに入力されるように配置されたトランス構造が形成されるように配置され、該トランス構造を介して前記電力の一部を抽出するように構成されてもよい。トランス構造は、単巻型の変圧器、複巻型の変圧器のいずれでもよい。なお、単巻型の変圧器の場合、二次コイルは、一次コイルの一部を両者で共有する部分のコイルをいう。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
電源回路
17日前
オムロン株式会社
電源回路
17日前
オムロン株式会社
電源回路
17日前
オムロン株式会社
電磁継電器
3日前
オムロン株式会社
スレーブ装置
13日前
オムロン株式会社
情報提供装置
13日前
オムロン株式会社
トリガスイッチ
13日前
オムロン株式会社
IOターミナル
13日前
オムロン株式会社
端子折り曲げ治具
13日前
オムロン株式会社
モータの監視装置
13日前
オムロン株式会社
電力開閉モジュール
13日前
オムロン株式会社
セーフティデバイス
13日前
オムロン株式会社
システムおよび方法
13日前
オムロン株式会社
パワーコンディショナ
5日前
オムロン株式会社
リモート安全入出力装置
13日前
オムロン株式会社
電力システム及び制御装置
5日前
オムロン株式会社
支援システム及び支援方法
13日前
オムロン株式会社
保護継電器及び電力制御装置
13日前
オムロン株式会社
情報処理装置及び情報処理方法
23日前
オムロン株式会社
パワーコンディショナシステム
13日前
オムロン株式会社
給電モジュール及び給電システム
13日前
オムロン株式会社
計測装置、計測方法及びプログラム
13日前
オムロン株式会社
教育支援システム及び教育支援方法
13日前
オムロン株式会社
電力供給システム及び電力制御装置
13日前
オムロン株式会社
検査装置、検査方法およびプログラム
23日前
オムロン株式会社
情報処理システムおよび情報処理方法
2日前
オムロン株式会社
生体情報処理装置及び動作情報処理装置
13日前
オムロン株式会社
生体情報処理装置及び動作情報処理装置
13日前
オムロン株式会社
交通管制システム、および動作切替方法
13日前
オムロン株式会社
安全IOターミナルおよび安全システム
13日前
オムロン株式会社
監視システム、警報方法、及びプログラム
13日前
オムロン株式会社
制御装置、制御方法、及び制御プログラム
2日前
オムロン株式会社
スレーブ装置およびネットワークシステム
13日前
オムロン株式会社
画像処理装置、画像処理方法及びプログラム
2日前
オムロン株式会社
監視システム、点灯制御方法、及びプログラム
13日前
オムロン株式会社
サーボドライバ及びサーボドライバの調整方法
13日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ