TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025082536
公報種別
公開特許公報(A)
公開日
2025-05-29
出願番号
2023195938
出願日
2023-11-17
発明の名称
ロボットシステム、制御装置および制御方法
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
B25J
13/08 20060101AFI20250522BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】エンドエフェクタに対するワークの保持位置の誤差に応じて、ロボットの挙動をより適切に制御するための技術が提供される。
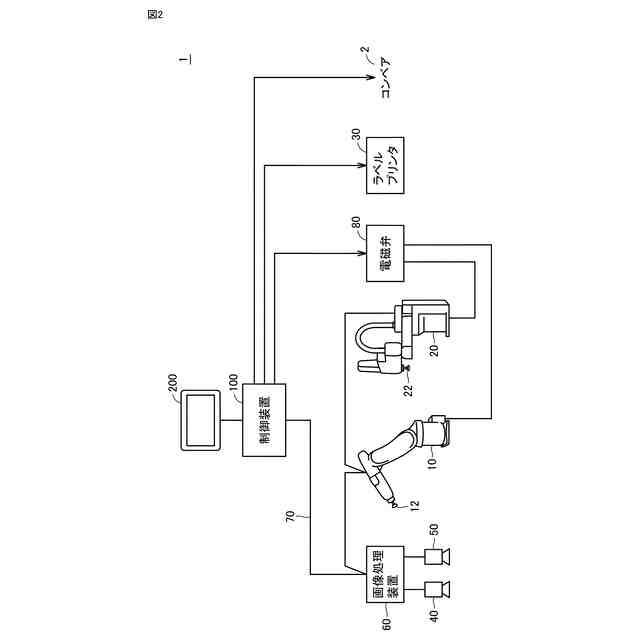
【解決手段】ロボットシステムは、第1ワークを保持するためのエンドエフェクタを有するロボットと、ロボットを制御するための制御装置と、エンドエフェクタの移動経路の一部を視野に含むカメラにより撮像された画像を処理するための画像処理装置とを含む。制御装置は、ロボットの挙動を規定するための、複数のポイントを含むティーチングデータを含む。画像処理装置は、画像に基づいて、エンドエフェクタに対する第1ワークの保持位置の誤差を算出する。制御装置は、誤差に基づいて1番目のポイントの位置および姿勢を補正し、1番目のポイントの補正後の位置および姿勢を基準として、2番目以降の各ポイントの位置および姿勢を算出する。
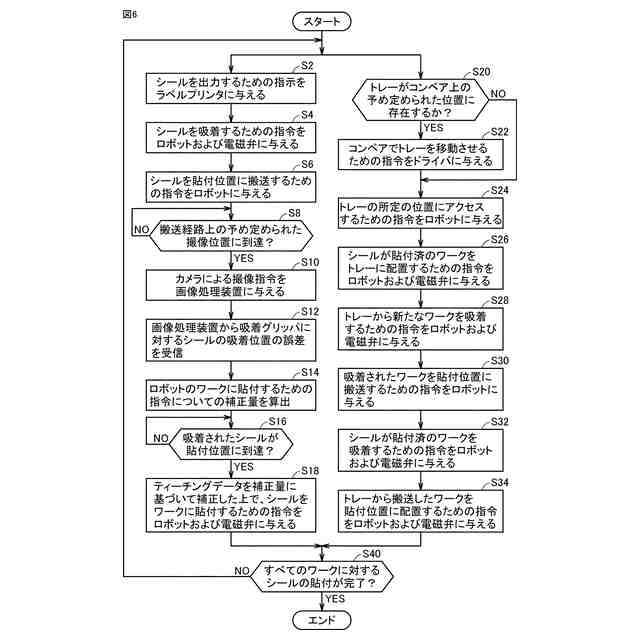
【選択図】図6
特許請求の範囲
【請求項1】
ロボットシステムであって、
第1ワークを保持するためのエンドエフェクタを有するロボットと、
前記ロボットを制御するための制御装置と、
前記エンドエフェクタの移動経路の一部を視野に含むカメラにより撮像された画像を処理するための画像処理装置とを備え、
前記制御装置は、ロボットの挙動を規定するための、複数のポイントを含むティーチングデータを備え、
前記ティーチングデータは、前記複数のポイントのうち1番目のポイントの位置および姿勢の指定と、前記複数のポイントのうち2番目以降の各ポイントについて、1つ前のポイントからの位置および姿勢の変位を示す指定とを含み、
前記画像処理装置は、前記画像に基づいて、前記エンドエフェクタに対する前記第1ワークの保持位置の誤差を算出し、
前記制御装置は、前記誤差に基づいて前記1番目のポイントの位置および姿勢を補正し、前記1番目のポイントの補正後の位置および姿勢を基準として、前記2番目以降の各ポイントの位置および姿勢を算出する、ロボットシステム。
続きを表示(約 1,400 文字)
【請求項2】
前記制御装置は、
前記エンドエフェクタが予め定められた撮像位置に到達したか否かを判断し、
前記エンドエフェクタが予め定められた撮像位置に到達すると、前記カメラによる撮像指令を前記画像処理装置に与える、請求項1に記載のロボットシステム。
【請求項3】
前記制御装置は、前記1番目のポイントの位置および姿勢を補正するために、前記誤差を打ち消すように補正量を算出する、請求項1に記載のロボットシステム。
【請求項4】
前記画像処理装置は、前記画像における前記第1ワークの像の位置に基づいて、前記誤差を算出する、請求項1に記載のロボットシステム。
【請求項5】
前記第1ワークはシールであり、
前記制御装置は、前記シールを第2ワークに貼付するように、前記ロボットを制御する、請求項1に記載のロボットシステム。
【請求項6】
前記第2ワークを搬送するための第2ロボットをさらに備え、
前記制御装置は、前記ロボットおよび前記第2ロボットが連携するように、前記ロボットおよび前記第2ロボットに指令を与える、請求項5に記載のロボットシステム。
【請求項7】
ロボットを制御するための制御装置であって、
前記ロボットは、第1ワークを保持するためのエンドエフェクタを有しており、
前記制御装置は、前記エンドエフェクタの移動経路の一部を視野に含むカメラにより撮像された画像を処理するための画像処理装置と接続されており、
前記制御装置は、前記ロボットの挙動を規定するための、複数のポイントを含むティーチングデータを備え、
前記ティーチングデータは、前記複数のポイントのうち1番目のポイントの位置および姿勢の指定と、前記複数のポイントのうち2番目以降の各ポイントについて、1つ前のポイントからの位置および姿勢の変位を示す指定とを含み、
前記画像処理装置は、前記画像に基づいて、前記エンドエフェクタに対する前記第1ワークの保持位置の誤差を算出し、
前記制御装置は、前記誤差に基づいて前記1番目のポイントの位置および姿勢を補正し、前記1番目のポイントの補正後の位置および姿勢を基準として、前記2番目以降の各ポイントの位置および姿勢を算出する、制御装置。
【請求項8】
ロボットの制御方法であって、
前記ロボットの挙動を規定するための、複数のポイントを含むティーチングデータを保持するステップを備え、前記ティーチングデータは、前記複数のポイントのうち1番目のポイントの位置および姿勢の指定と、前記複数のポイントのうち2番目以降の各ポイントについて、1つ前のポイントからの位置および姿勢の変位を示す指定とを含み、
前記ロボットがエンドエフェクタを用いて第1ワークを保持するステップと、
前記エンドエフェクタの移動経路の一部を視野に含むカメラにより撮像された画像を処理することで、前記エンドエフェクタに対する前記第1ワークの保持位置の誤差を算出するステップと、
前記誤差に基づいて前記1番目のポイントの位置および姿勢を補正するステップと、
前記1番目のポイントの補正後の位置および姿勢を基準として、前記2番目以降の各ポイントの位置および姿勢を算出するステップとを備える、制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステム、制御装置および制御方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
産業オートメーション(Industrial Automation)の分野において、様々な用途にロボットが利用されている。ロボットは、画像計測により得られた情報に基づいて制御されることもある。
【0003】
例えば、特開2020-097084号公報(特許文献1)は、ロボットを動作させたまま、ワークをカメラの画角内に適正に収め、サイクルタイムを短縮することができるロボットシステムを開示する。
【先行技術文献】
【特許文献】
【0004】
特開2020-097084号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
例えば、ロボットを用いてワークを保持して別のワークと組み合わせるようなアプリケーションにおいては、ロボットがワークを保持する位置の精度が重要である。上述の先行技術は、ロボットがワークを保持する位置の精度を考慮するものではない。
【0006】
本発明のある局面によれば、エンドエフェクタに対するワークの保持位置の誤差に応じて、ロボットの挙動をより適切に制御するための技術が提供される。
【課題を解決するための手段】
【0007】
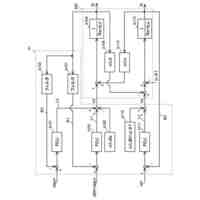
ある実施の形態に従うロボットシステムは、第1ワークを保持するためのエンドエフェクタを有するロボットと、ロボットを制御するための制御装置と、エンドエフェクタの移動経路の一部を視野に含むカメラにより撮像された画像を処理するための画像処理装置とを含む。制御装置は、ロボットの挙動を規定するための、複数のポイントを含むティーチングデータを含む。ティーチングデータは、複数のポイントのうち1番目のポイントの位置および姿勢の指定と、複数のポイントのうち2番目以降の各ポイントについて、1つ前のポイントからの位置および姿勢の変位を示す指定とを含む。画像処理装置は、画像に基づいて、エンドエフェクタに対する第1ワークの保持位置の誤差を算出する。制御装置は、誤差に基づいて1番目のポイントの位置および姿勢を補正し、1番目のポイントの補正後の位置および姿勢を基準として、2番目以降の各ポイントの位置および姿勢を算出する。
【0008】
この構成によれば、画像処理装置が算出したエンドエフェクタに対する第1ワークの保持位置の誤差に基づいて、ロボットの挙動を補正できるので、ロボットを用いた作業の精度を高めることができる。この構成によれば、ティーチングデータに含まれる1番目のポイントの位置および姿勢を補正すれば、2番目以降の各ポイントの位置および姿勢を再度補正する必要がない。これによって、ティーチングデータの調整作業を容易化および簡素化できる。
【0009】
制御装置は、エンドエフェクタが予め定められた撮像位置に到達したか否かを判断し、エンドエフェクタが予め定められた撮像位置に到達すると、カメラによる撮像指令を画像処理装置に与えてもよい。この構成によれば、制御装置は、エンドエフェクタが撮像位置に到達すると、撮像指令を画像処理装置に与えればよいので、制御装置における保持位置の誤差を算出するための処理を簡素化できる。
【0010】
制御装置は、1番目のポイントの位置および姿勢を補正するために、誤差を打ち消すように補正量を算出してもよい。この構成によれば、1番目のポイントの位置および姿勢を補正するための補正量を誤差に応じて算出できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
安全装置
1か月前
オムロン株式会社
ドライバ
23日前
オムロン株式会社
操作装置
1か月前
オムロン株式会社
ロボット
1か月前
オムロン株式会社
ロボット
1か月前
オムロン株式会社
電磁継電器
25日前
オムロン株式会社
スイッチ装置
22日前
オムロン株式会社
電力変換装置
1か月前
オムロン株式会社
撮影システム
1か月前
オムロン株式会社
電力変換装置
1か月前
オムロン株式会社
電力変換装置
1か月前
オムロン株式会社
電力変換装置
1か月前
オムロン株式会社
電力変換装置
1か月前
オムロン株式会社
電力変換装置
1か月前
オムロン株式会社
インバータ装置
29日前
オムロン株式会社
シート検査装置
23日前
オムロン株式会社
無停電電源装置
2日前
オムロン株式会社
電磁ロック装置
1か月前
オムロン株式会社
情報処理システム
9日前
オムロン株式会社
電気機器ユニット
29日前
オムロン株式会社
スイッチング装置
7日前
オムロン株式会社
電気機器ユニット
4日前
オムロン株式会社
処理方法、及び処理装置
23日前
オムロン株式会社
ソリッドステートリレー
1か月前
オムロン株式会社
車椅子用治具および車椅子
1か月前
オムロン株式会社
端子台および端子台セット
29日前
オムロン株式会社
車椅子用治具および車椅子
1か月前
オムロン株式会社
充電システム及びモジュール
22日前
オムロン株式会社
電力変換装置及び電力変換システム
1か月前
オムロン株式会社
送電装置、受電装置およびシステム
1か月前
オムロン株式会社
トルク推定方法及びトルク推定装置
1日前
オムロン株式会社
分析装置、分析方法およびプログラム
1か月前
オムロン株式会社
通信装置、通信方法、通信プログラム
7日前
オムロン株式会社
制御装置、制御方法及び制御プログラム
1か月前
オムロン株式会社
監視装置、監視方法および監視プログラム
1か月前
オムロン株式会社
風計測装置およびこれを備えた気象センサ
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ