TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025086156
公報種別
公開特許公報(A)
公開日
2025-06-06
出願番号
2023200023
出願日
2023-11-27
発明の名称
ロボット
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
9/06 20060101AFI20250530BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットのアーム部を軽量化する。
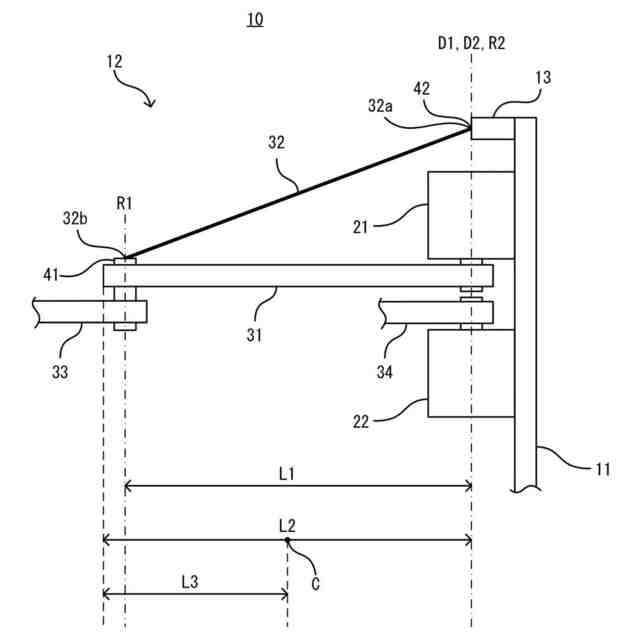
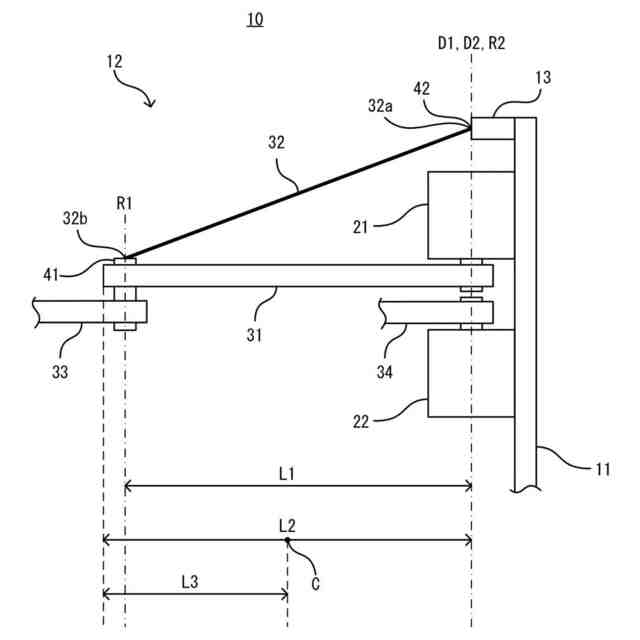
【解決手段】ロボットは、基部と、第一駆動軸を有し基部に取り付けられている第一モータと、第一駆動軸を中心として第一モータにより回転される第一リンクと、第一リンクに設けられ第一回転軸を有する第一関節と、基部に設けられ第一駆動軸と同軸の第二回転軸を有する第二関節と、一端部が第二関節に接続され、他端部が第一駆動軸と第一回転軸とを結ぶ線分の方向において第一駆動軸から第一リンクの第一回転軸側先端の間で第一リンクに接続され、第二回転軸を中心として回転可能な第二リンクと、第一関節に接続され第一回転軸を中心として回転可能な第三リンクと、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
基部と、
第一駆動軸を有し前記基部に取り付けられている第一モータと、
前記第一駆動軸を中心として前記第一モータにより回転される第一リンクと、
前記第一リンクに設けられ第一回転軸を有する第一関節と、
前記基部に設けられ前記第一駆動軸と同軸の第二回転軸を有する第二関節と、
一端部が前記第二関節に接続され、他端部が前記第一駆動軸と前記第一回転軸とを結ぶ線分の方向において前記第一駆動軸から前記第一リンクの前記第一回転軸側先端の間で前記第一リンクに接続され、前記第二回転軸を中心として回転可能な第二リンクと、
前記第一関節に接続され前記第一回転軸を中心として回転可能な第三リンクと、
を有するロボット。
続きを表示(約 710 文字)
【請求項2】
前記第二リンクの前記他端部は、前記第一駆動軸と前記第一回転軸とを結ぶ線分の方向において、前記第一駆動軸と前記第一リンクの前記第一回転軸側先端との中央位置よりも前記第一回転軸側の位置で前記第一リンクに接続されている
請求項1に記載のロボット。
【請求項3】
前記第二リンクは、前記第一駆動軸と前記第一回転軸とを結ぶ線分の方向において、前記第一リンクよりも曲げ剛性が低い
請求項1に記載のロボット。
【請求項4】
前記第二リンクは、前記第一リンクよりも鉛直方向において上側に設けられている
請求項3に記載のロボット。
【請求項5】
前記第二リンクの少なくとも端部を除く領域は、線状部材、又は、帯状部材により形成されている
請求項4に記載のロボット。
【請求項6】
第二駆動軸を有し前記基部に取り付けられている第二モータと、
前記第二駆動軸を中心として前記第二モータにより回転される第四リンクと、
前記第四リンクに設けられ第四回転軸を有する第四関節と、
前記第四関節に接続され前記第四回転軸を中心として回転可能な第五リンクと、
前記第三リンクに設けられ第三回転軸を有し、前記第五リンクが回転可能に接続される第三関節と、
前記第三リンクに設けられるエンドエフェクタ取付部と、をさらに有する
請求項1に記載のロボット。
【請求項7】
前記エンドエフェクタ取付部に取り付けられるエンドエフェクタをさらに有する
請求項6に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
非特許文献1には、パックを打ち返すことができるロボットアームを備えたエアホッケーゲーム装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2000-300823号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
水平多関節ロボット等の水平面内で稼働するロボットのアーム部は、アーム部のリンクの片側が基部に保持された片持ち構造となっているため、リンクに強度が求められる。
【0005】
しかしながら、リンクの強度を高めようとするとリンクの重量が増加し、その結果、アーム部全体の重量が増加してしまう。アーム部の重量が増加すると、ロボットを駆動するためのエネルギー効率が低下したり、アーム部の運動速度が低下する等の問題が生じる。
【0006】
本開示は、アーム部を軽量化したロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の一態様は、基部と、第一駆動軸を有し前記基部に取り付けられている第一モータと、前記第一駆動軸を中心として前記第一モータにより回転される第一リンクと、前記第一リンクに設けられ第一回転軸を有する第一関節と、前記基部に設けられ前記第一駆動軸と同軸の第二回転軸を有する第二関節と、一端部が前記第二関節に接続され、他端部が前記第一駆動軸と前記第一回転軸とを結ぶ線分の方向において前記第一駆動軸から前記第一リンクの前記第一回転軸側先端の間で前記第一リンクに接続され、前記第二回転軸を中心として回転可能な第二リンクと、前記第一関節に接続され前記第一回転軸を中心として回転可能な第三リンクと、を有するロボットである。
【発明の効果】
【0008】
本開示によれば、ロボットのアーム部を軽量化することができる。
【図面の簡単な説明】
【0009】
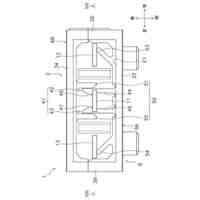
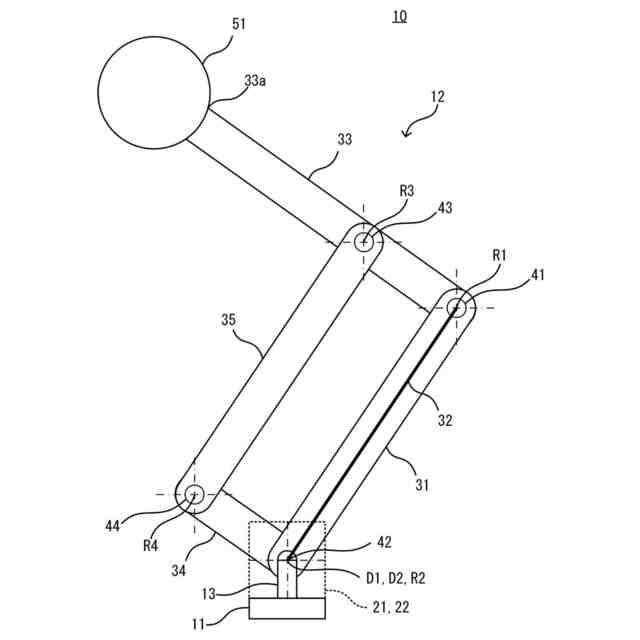
実施形態のロボットの上面図である。
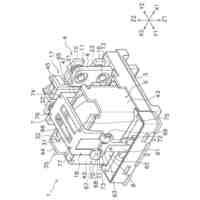
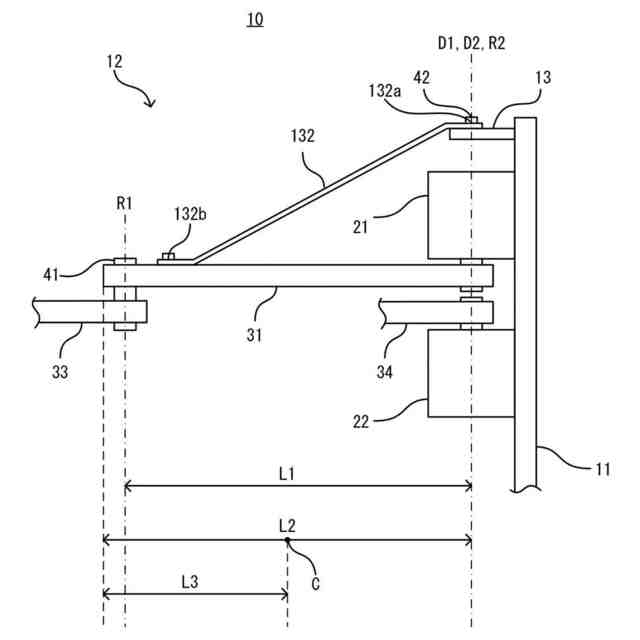
実施形態のロボットの側面図である。
実施形態の他の態様のロボットの上面図である。
実施形態の他の態様のロボットの側面図である。
【発明を実施するための形態】
【0010】
以下、本開示の実施形態の一例を、図面を参照しつつ説明する。なお、各図面において同一又は実質的に同等な要素、部材及び部分には同一の参照符号を付与している。また、図面の寸法及び比率は、説明の都合上誇張されており、実際の比率とは異なる場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
ドライバ
13日前
オムロン株式会社
電磁継電器
15日前
オムロン株式会社
スイッチ装置
12日前
オムロン株式会社
シート検査装置
13日前
オムロン株式会社
インバータ装置
19日前
オムロン株式会社
電気機器ユニット
19日前
オムロン株式会社
処理方法、及び処理装置
13日前
オムロン株式会社
端子台および端子台セット
19日前
オムロン株式会社
充電システム及びモジュール
12日前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
13日前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
12日前
オムロン株式会社
培地監視装置、培地監視方法、及びプログラム
19日前
オムロン株式会社
導光板、表示装置、遊技機、および車載表示器
20日前
オムロン株式会社
検査管理システム、検査管理装置、教師データ生成方法、及びプログラム
19日前
オムロン株式会社
設定確認端末、駅務機器、および設定確認方法
7日前
オムロン株式会社
学習済みモデル生成装置、制御装置、学習済みモデル生成方法、及び学習済みモデル生成プログラム
19日前
株式会社ザイテック
吸着装置
26日前
株式会社ジャノメ
ロボット
15日前
住友重機械工業株式会社
教示装置
12日前
株式会社ダイヘン
搬送装置
19日前
個人
ペグハンマおよびペグハンマ用部品
19日前
川崎重工業株式会社
ロボット
13日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
12日前
工機ホールディングス株式会社
作業機
12日前
住友重機械工業株式会社
支援装置
19日前
住友重機械工業株式会社
支援装置
19日前
ホシデン株式会社
分解用治具
19日前
株式会社マキタ
電気機器
13日前
アピュアン株式会社
衝撃工具
21日前
オークラ輸送機株式会社
ハンド装置
1か月前
工機ホールディングス株式会社
作業機
15日前
工機ホールディングス株式会社
作業機
15日前
工機ホールディングス株式会社
作業機
15日前
工機ホールディングス株式会社
作業機
15日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ