TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025108138
公報種別
公開特許公報(A)
公開日
2025-07-23
出願番号
2024001849
出願日
2024-01-10
発明の名称
情報処理システム
出願人
オムロン株式会社
代理人
個人
,
個人
,
個人
主分類
A61B
5/11 20060101AFI20250715BHJP(医学または獣医学;衛生学)
要約
【課題】装置のサイズやコストを抑えることができる情報処理システムを提供する。
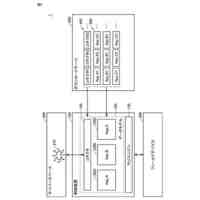
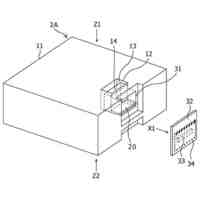
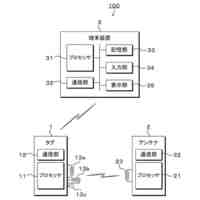
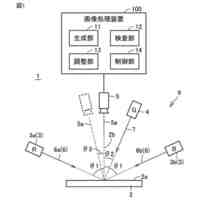
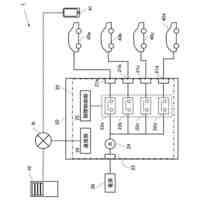
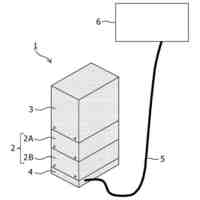
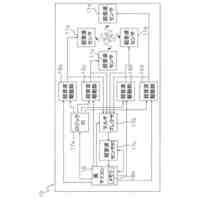
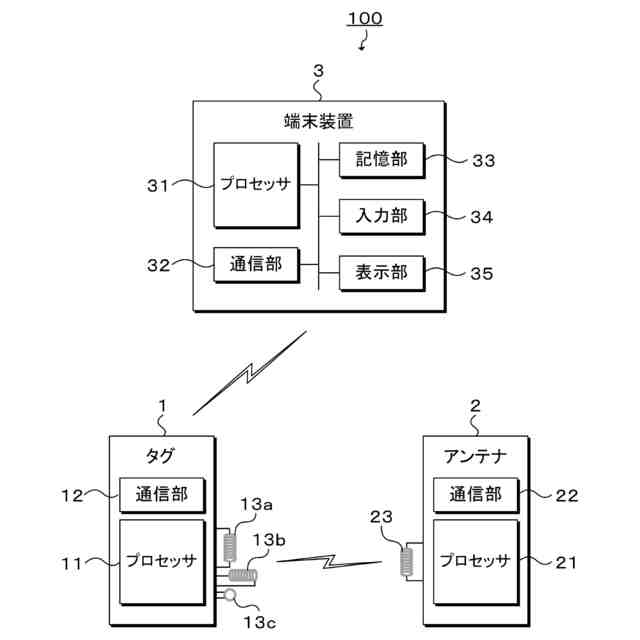
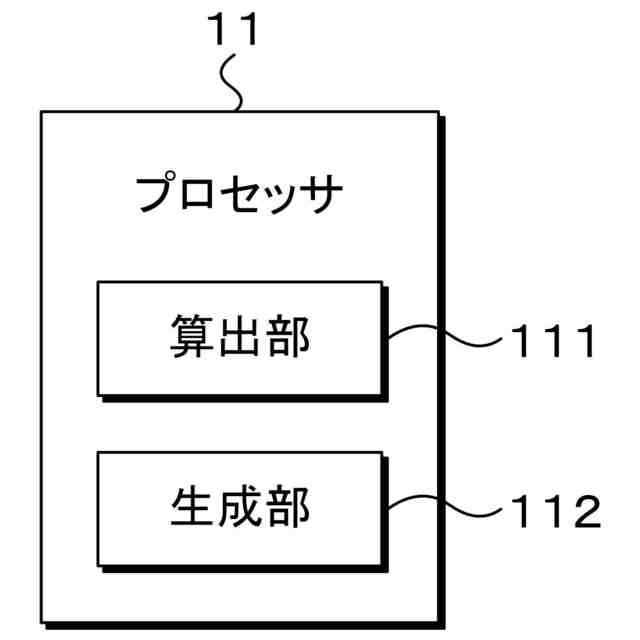
【解決手段】情報処理システム100は、磁界を発生させる磁界発生装置であるアンテナ2と、互いに直交する三軸上にそれぞれ配置され、磁界を検出する三つのコイル13a,13b,13cと、三つのコイル13a,13b,13cの各々により検出された磁界の値に基づいて磁界強度を算出する算出部と、算出部により算出された磁界強度に対する三つのコイル13a,13b,13cの各々により検出された磁界の値の比率に基づいて、三つのコイル13a,13b,13cを有する対象物であるタグ1の姿勢情報を生成する生成部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
磁界を発生させる磁界発生装置と、
互いに直交する三軸上にそれぞれ配置され、前記磁界を検出する三つのコイルと、
前記三つのコイルの各々により検出された磁界の値に基づいて磁界強度を算出する算出部と、
前記算出部により算出された前記磁界強度に対する前記三つのコイルの各々により検出された磁界の値の比率に基づいて、前記三つのコイルを有する対象物の姿勢情報を生成する生成部と、
を備える情報処理システム。
続きを表示(約 660 文字)
【請求項2】
前記生成部は、前記算出部により算出された前記磁界強度に対する前記三つのコイルの各々により検出された磁界の値の比率を用いて、前記三軸の各々の軸磁界成分と前記対象物とがなす角度である前記対象物の傾き角度を算出し、前記対象物の姿勢情報を生成する、
請求項1記載の情報処理システム。
【請求項3】
前記生成部は、前記算出部により算出された前記磁界強度に対する前記三つのコイルの各々により検出された磁界の値の比率を用いて、前記三軸の各々の軸磁界成分に対する前記対象物の傾きを表す単位ベクトルを算出し、前記対象物の姿勢情報を生成する、
請求項1記載の情報処理システム。
【請求項4】
前記磁界発生装置を少なくとも三つ備える、
請求項1記載の情報処理システム。
【請求項5】
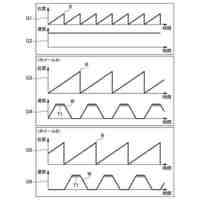
前記磁界発生装置の各々は、磁界を発生させる周期パターンに基づいて、順に、連続的に磁界を発生させる、
請求項4記載の情報処理システム。
【請求項6】
前記磁界発生装置は、LF(Low Frequency)の電磁波を発生させるコイルを有するアンテナである、
請求項1記載の情報処理システム。
【請求項7】
前記対象物は、前記三つのコイルを有するタグである、
請求項1記載の情報処理システム。
【請求項8】
前記タグは、作業動作を行う対象に取り付けられる、
請求項7記載の情報処理システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物の姿勢情報を生成する情報処理システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
下記特許文献1には、工場の生産ラインなどにおいて作業者が作業する領域を推定する制御システムが開示されている。この制御システムは、作業者の各部位の加速度データを検出する加速度センサと、作業者の各部位の角速度データを検出する角速度センサと、を備えている。そして、経時的に取得される加速度データ及び角速度データを用いて、作業者の部位ごとの位置情報及び姿勢情報を算出している。
【先行技術文献】
【特許文献】
【0003】
特開2017-144489号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の制御システムでは、位置情報及び姿勢情報を算出するために、加速度センサと角速度センサの2つのセンサを備える必要がある。したがって、装置のサイズやコストが嵩む要因になる。
【0005】
このような事情に鑑み、本発明は、装置のサイズやコストを抑えることができる情報処理システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る情報処理システムは、磁界を発生させる磁界発生装置と、互いに直交する三軸上にそれぞれ配置され、磁界を検出する三つのコイルと、三つのコイルの各々により検出された磁界の値に基づいて磁界強度を算出する算出部と、算出部により算出された磁界強度に対する三つのコイルの各々により検出された磁界の値の比率に基づいて、三つのコイルを有する対象物の姿勢情報を生成する生成部と、を備える。
【0007】
この態様によれば、磁界発生装置から生ずる磁界を、互いに直交する三軸上に配置された三つのコイルで検出し、それら三つの検出値に基づいて算出される磁界強度を用いて対象物の位置情報を得ることができるとともに、磁界強度に対する三つの検出値の比率を用いることで、三つのコイルを有する対象物の姿勢情報を得ることができる。
【0008】
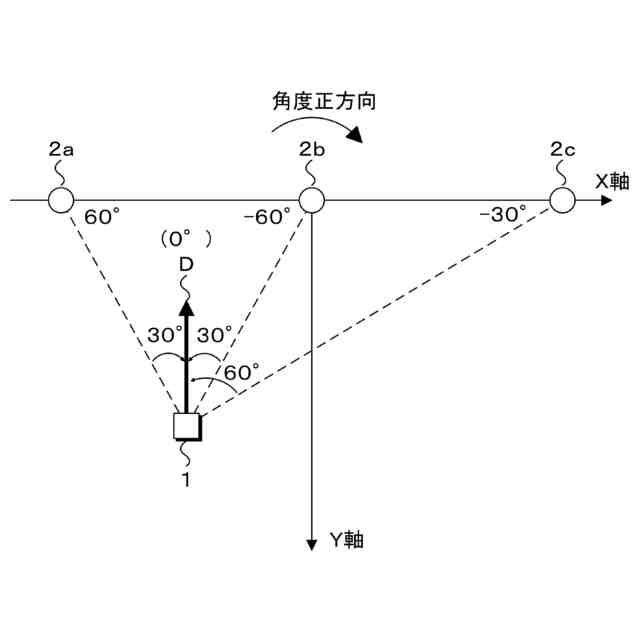
上述した態様において、生成部は、算出部により算出された磁界強度に対する三つのコイルの各々により検出された磁界の値の比率を用いて、三軸の各々の軸磁界成分と対象物とがなす角度である対象物の傾き角度を算出し、対象物の姿勢情報を生成してもよい。
【0009】
この態様によれば、三つの検出値に基づく磁界強度に対する三つの検出値の比率を用いて算出される三軸の各々の軸磁界成分に対する対象物の傾き角度を、三つのコイルを有する対象物の姿勢情報に含めることが可能となる。
【0010】
上述した態様において、生成部は、算出部により算出された磁界強度に対する三つのコイルの各々により検出された磁界の値の比率を用いて、三軸の各々の軸磁界成分に対する対象物の傾きを表す単位ベクトルを算出し、対象物の姿勢情報を生成してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
制御装置
19日前
オムロン株式会社
スイッチ装置
1か月前
オムロン株式会社
無停電電源装置
1か月前
オムロン株式会社
導線折り曲げ治具
3日前
オムロン株式会社
スイッチング装置
1か月前
オムロン株式会社
電気機器ユニット
1か月前
オムロン株式会社
情報処理システム
1か月前
オムロン株式会社
充電システム及びモジュール
1か月前
オムロン株式会社
搬送装置、搬送方法、プログラム
19日前
オムロン株式会社
回転制御システム及び回転制御方法
3日前
オムロン株式会社
トルク推定方法及びトルク推定装置
1か月前
オムロン株式会社
通信装置、通信方法、通信プログラム
1か月前
オムロン株式会社
画像処理システムおよび画像処理方法
9日前
オムロン株式会社
非接触給電システム及びその制御方法
25日前
オムロン株式会社
安全監視装置、制御方法およびプログラム
24日前
オムロン株式会社
情報処理システム、方法およびプログラム
19日前
オムロン株式会社
情報処理システム、方法およびプログラム
19日前
オムロン株式会社
充電器、電力開閉モジュール、充電システム
1か月前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
1か月前
オムロン株式会社
外装ケースユニット、外装ケース及び電気設備
1か月前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
1か月前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
9日前
オムロン株式会社
雨滴検出装置の検査装置、検査用治具、検査方法
25日前
オムロン株式会社
アンテナ設定方法及びそれを用いた測位システム
1か月前
オムロン株式会社
風計測装置、風計測方法および風計測プログラム
13日前
オムロン株式会社
整列制御装置、整列制御方法、およびプログラム
19日前
オムロン株式会社
整流回路、整流回路の制御方法、及び電力システム
23日前
オムロン株式会社
雨滴検出装置およびその補正方法、補正プログラム
26日前
オムロン株式会社
充電計画生成装置、電力開閉モジュール及び充電システム
1か月前
オムロン株式会社
センサ装置および対象物検知方法、対象物検知プログラム
12日前
オムロン株式会社
支援システム、支援装置、支援方法、及び支援プログラム
11日前
オムロン株式会社
センサ、センサの制御方法、プログラム及び安全監視システム
2日前
オムロン株式会社
制御装置、無人飛行体、飛行制御方法、および飛行制御プログラム
1か月前
オムロン株式会社
ペン型入力装置、描画態様変更方法、および、描画態様変更プログラム
1か月前
オムロン株式会社
情報処理装置、情報処理方法、情報処理プログラム、情報処理システム
24日前
オムロン株式会社
光電センサ及びしきい値補正方法
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ