TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025126536
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024022797
出願日
2024-02-19
発明の名称
センサ、センサの制御方法、プログラム及び安全監視システム
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
H04N
7/18 20060101AFI20250822BHJP(電気通信技術)
要約
【課題】ロボットと作業者とが協働する生産現場における生産性を高める。
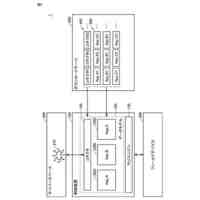
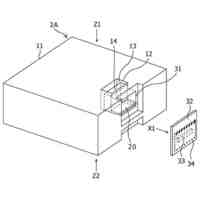
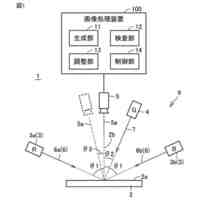
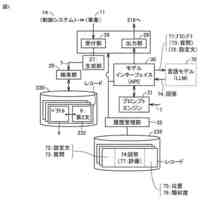
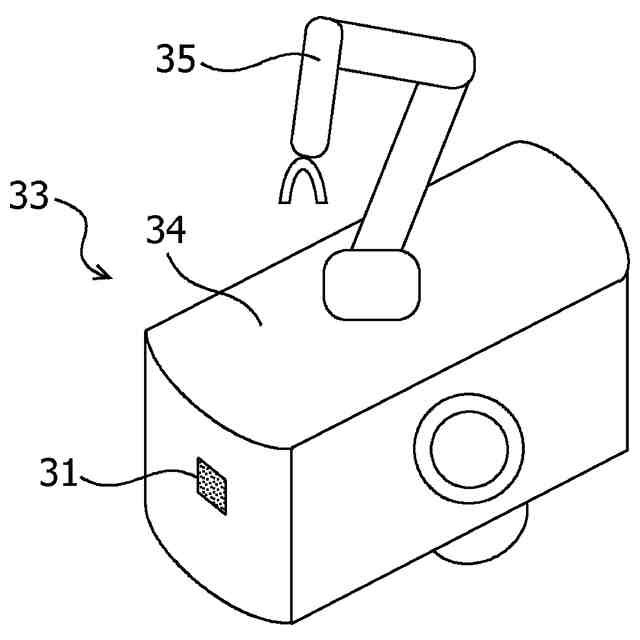
【解決手段】センサは、所定領域の距離画像及び輝度画像を生成する画像生成部と、距離画像に基づいて、所定領域の点群データである第1点群データを作成する第1点群データ作成部と、輝度画像からタグが検出された場合、タグを解析した解析結果に基づいて、所定領域における所定範囲をマスクするためのマスクデータを作成するマスクデータ作成部と、マスクデータに基づいて、第1点群データからタグが設けられた移動体の点群データを除外した第2点群データを作成する第2点群データ作成部と、を備える。
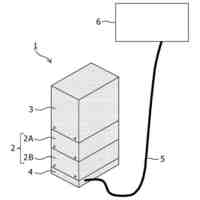
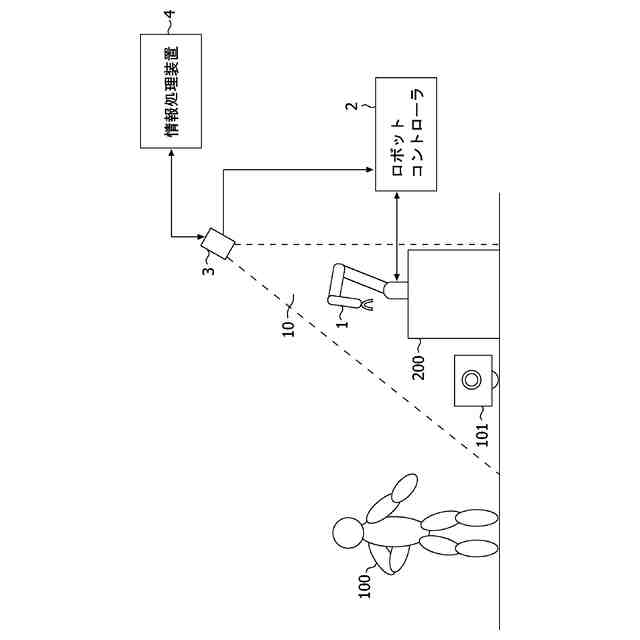
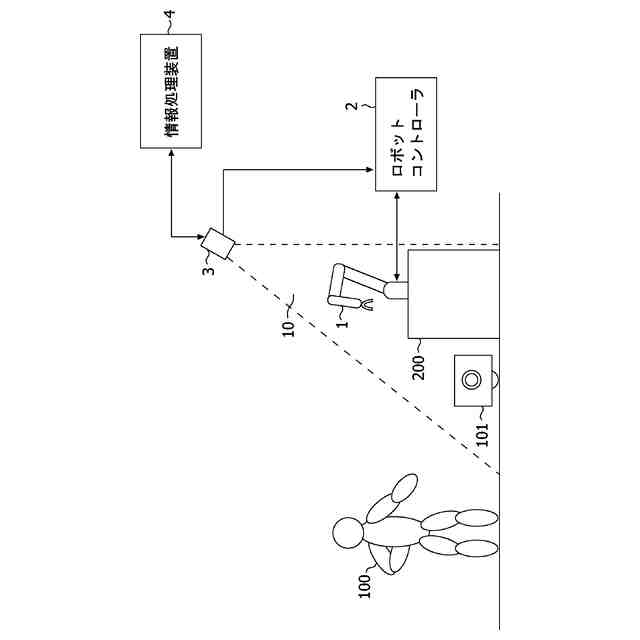
【選択図】図1
特許請求の範囲
【請求項1】
所定領域の距離画像及び輝度画像を生成する画像生成部と、
前記距離画像に基づいて、前記所定領域の3次元点群データである第1点群データを作成する第1点群データ作成部と、
前記輝度画像からタグが検出された場合、前記タグを解析した解析結果に基づいて、前記所定領域における所定範囲をマスクするためのマスクデータを作成するマスクデータ作成部と、
前記マスクデータに基づいて、前記第1点群データから前記タグが設けられた移動体の点群データを除外した第2点群データを作成する第2点群データ作成部と、
を備えるセンサ。
続きを表示(約 1,300 文字)
【請求項2】
前記タグを解析する解析部を備え、
前記解析部は、
前記輝度画像に基づいて、前記タグの識別情報を取得し、
前記タグの前記識別情報に基づいて、前記移動体に関するサイズデータを取得し、
前記距離画像及び前記輝度画像、又は、前記輝度画像、に基づいて、前記タグの位置座標及び前記タグの角度情報を算出し、
前記サイズデータ、前記タグの前記位置座標、前記タグの前記角度情報及び前記タグと前記移動体との相対的な位置関係を示す関係情報に基づいて、前記マスクデータを生成する、
請求項1に記載のセンサ。
【請求項3】
前記タグは、幾何学的特徴を有する、
請求項2に記載のセンサ。
【請求項4】
前記第2点群データに基づいて、前記所定領域内における作業者と危険源との位置関係を判定する判定部を備える、
請求項1から3の何れか一項に記載のセンサ。
【請求項5】
前記輝度画像から前記タグが検出されなかった場合、前記第1点群データに基づいて、前記所定領域内における作業者と危険源との位置関係を判定する判定部を備える、
請求項1から3の何れか一項に記載のセンサ。
【請求項6】
所定領域の距離画像及び輝度画像を生成するステップと、
前記距離画像に基づいて、前記所定領域の3次元点群データである第1点群データを作成するステップと、
前記輝度画像からタグが検出された場合、前記タグを解析した解析結果に基づいて、前記所定領域における所定範囲をマスクするためのマスクデータを作成するステップと、
前記マスクデータに基づいて、前記第1点群データから前記タグが設けられた移動体の点群データを除外した第2点群データを作成するステップと、
を有するセンサの制御方法。
【請求項7】
コンピュータに、
所定領域の距離画像及び輝度画像を生成するステップと、
前記距離画像に基づいて、前記所定領域の3次元点群データである第1点群データを作成するステップと、
前記輝度画像からタグが検出された場合、前記タグを解析した解析結果に基づいて、前記所定領域における所定範囲をマスクするためのマスクデータを作成するステップと、
前記マスクデータに基づいて、前記第1点群データから前記タグが設けられた移動体の
点群データを除外した第2点群データを作成するステップと、
を実行させるためのプログラム。
【請求項8】
所定領域の距離画像及び輝度画像を取得する画像取得部と、
前記距離画像に基づいて、前記所定領域の3次元点群データである第1点群データを作成する第1点群データ作成部と、
前記輝度画像からタグが検出された場合、前記タグを解析した解析結果に基づいて、前記所定領域における所定範囲をマスクするためのマスクデータを作成するマスクデータ作成部と、
前記マスクデータに基づいて、前記第1点群データから前記タグが設けられた移動体の点群データを除外した第2点群データを作成する第2点群データ作成部と、
を備える安全監視システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、センサ、センサの制御方法、プログラム及び安全監視システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
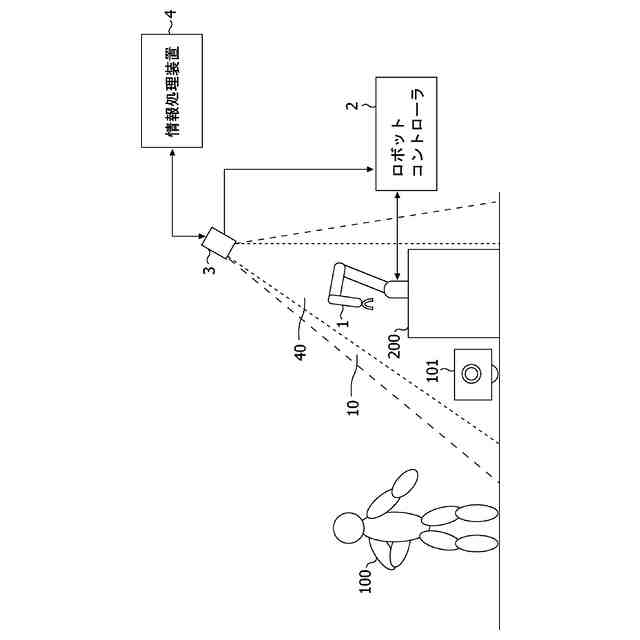
生産現場において、作業者とロボットとが協働しながら作業が行われている。このような生産現場では、作業者の安全を確保するための工夫が施されていると共に、生産性を高めることが行われている。例えば、特許文献1には、ロボットと作業者とが協働する生産現場において安全性および生産性の両方を高める技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第7036078号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
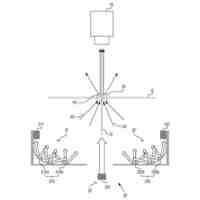
生産現場では、作業者等の人がロボット等の危険源に接近したことをセンサが検知することにより、ロボットの減速又は停止が行われている。生産現場には、人以外の移動装置(移動体)が稼働している場合がある。ロボットに接近する物体が検知された場合、人か移動装置かに関わらず、ロボットの減速又は停止を行うことで、生産性が低下するという課題がある。
【0005】
本発明は上記課題に鑑みてなされたものであって、その目的とするところは、ロボットと作業者とが協働する生産現場における生産性を高める技術を提供することである。
【課題を解決するための手段】
【0006】
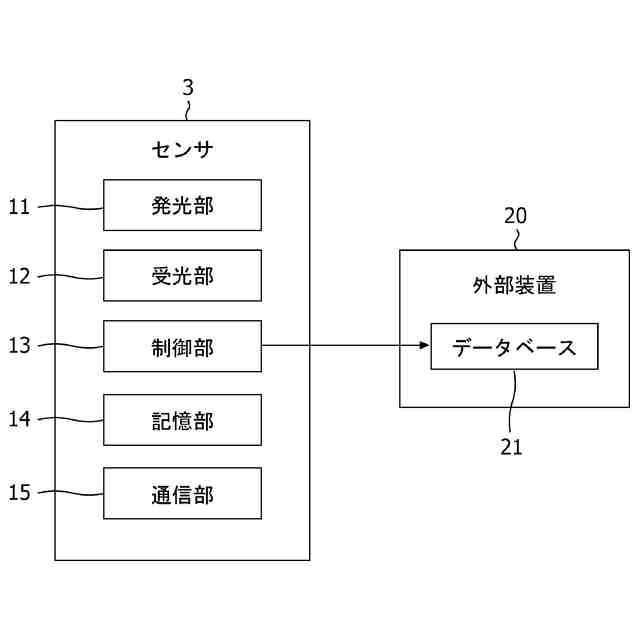
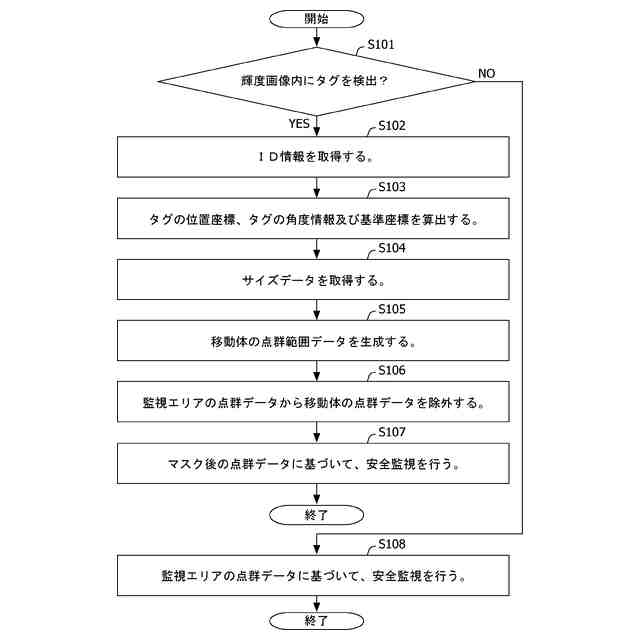
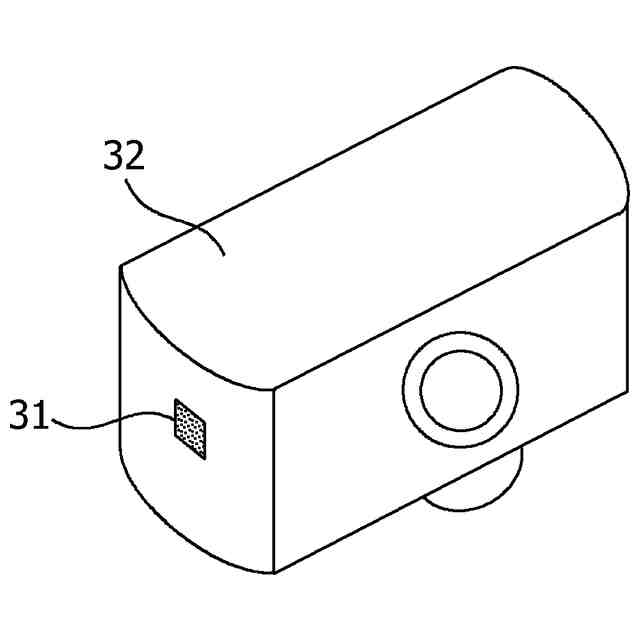
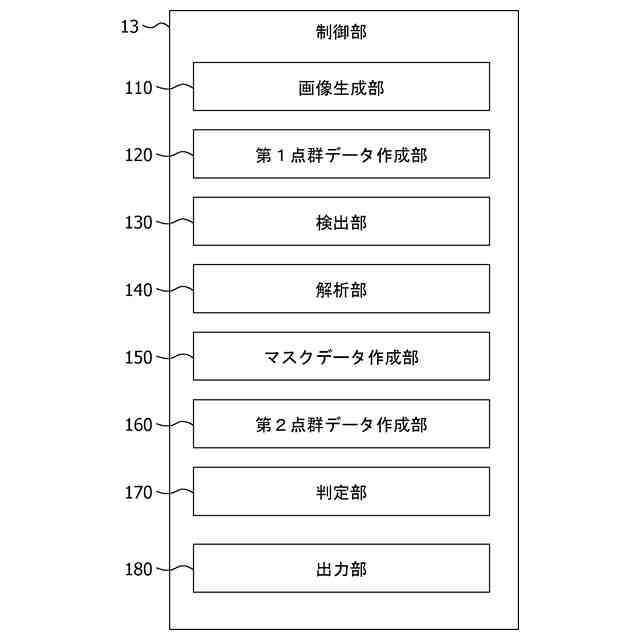
本発明の一観点に係るセンサは、所定領域の距離画像及び輝度画像を生成する画像生成部と、前記距離画像に基づいて、前記所定領域の3次元点群データである第1点群データを作成する第1点群データ作成部と、前記輝度画像からタグが検出された場合、前記タグを解析した解析結果に基づいて、前記所定領域における所定範囲をマスクするためのマスクデータを作成するマスクデータ作成部と、前記マスクデータに基づいて、前記第1点群データから前記タグが設けられた移動体の点群データを除外した第2点群データを作成する第2点群データ作成部と、を備える。第1点群データからタグが設けられた移動体の点群データを除外した第2点群データを用いて所定領域における安全監視を行うことにより、ロボットと作業者とが協働する生産現場における生産性を高めることが可能となる。
【0007】
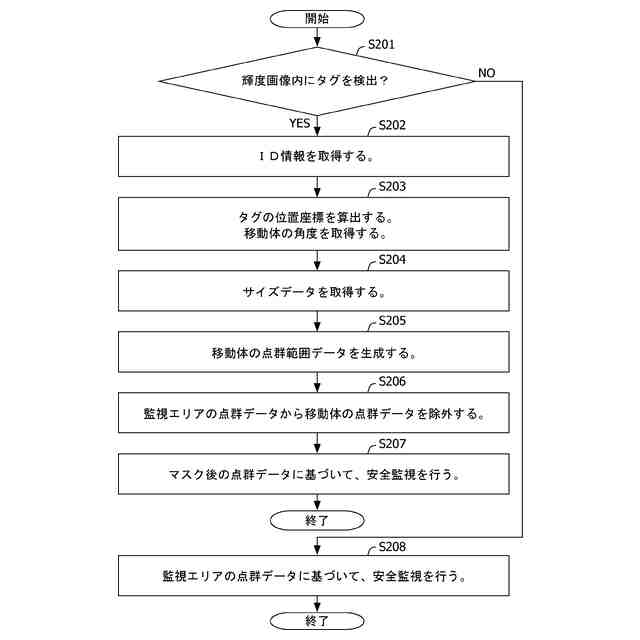
上記センサは、前記タグを解析する解析部を備え、前記解析部は、前記輝度画像に基づいて、前記タグの識別情報を取得し、前記タグの前記識別情報に基づいて、前記移動体に関するサイズデータを取得し、前記距離画像及び前記輝度画像、又は、前記輝度画像、に基づいて、前記タグの位置座標及び前記タグの角度情報を算出し、前記サイズデータ、前記タグの前記位置座標、前記タグの前記角度情報及び前記タグと前記移動体との相対的な位置関係を示す関係情報に基づいて、前記マスクデータを生成する。前記タグは、幾何学的特徴を有する。
【0008】
上記センサは、前記第2点群データに基づいて、前記所定領域内における作業者と危険源との位置関係を判定する判定部を備える。上記センサは、前記輝度画像から前記タグが検出されなかった場合、前記第1点群データに基づいて、前記所定領域内における作業者と危険源との位置関係を判定する判定部を備える。
【0009】
本発明は、上記処理の少なくとも一部を含む制御方法や、上記処理の少なくとも一部をコンピュータに実行させるためのプログラム、または、そのようなプログラムを非一時的に記録したコンピュータ読取可能な記録媒体として捉えることもできる。また、上記処理の少なくとも一部を含む安全監視システムとして捉えることもできる。上記構成および処理の各々は技術的な矛盾が生じない限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0010】
本発明によれば、ロボットと作業者とが協働する生産現場における生産性を高めることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
制御装置
1か月前
オムロン株式会社
ドライバ
2か月前
オムロン株式会社
電磁継電器
22日前
オムロン株式会社
スイッチ装置
2か月前
オムロン株式会社
無停電電源装置
1か月前
オムロン株式会社
シート検査装置
2か月前
オムロン株式会社
情報処理システム
2か月前
オムロン株式会社
スイッチング装置
2か月前
オムロン株式会社
導線折り曲げ治具
26日前
オムロン株式会社
電気機器ユニット
1か月前
オムロン株式会社
処理方法、及び処理装置
2か月前
オムロン株式会社
充電システム及びモジュール
2か月前
オムロン株式会社
情報処理装置及び情報処理方法
4日前
オムロン株式会社
搬送装置、搬送方法、プログラム
1か月前
オムロン株式会社
回転制御システム及び回転制御方法
26日前
オムロン株式会社
トルク推定方法及びトルク推定装置
1か月前
オムロン株式会社
検査装置、検査方法およびプログラム
4日前
オムロン株式会社
画像処理システムおよび画像処理方法
1か月前
オムロン株式会社
非接触給電システム及びその制御方法
1か月前
オムロン株式会社
通信装置、通信方法、通信プログラム
2か月前
オムロン株式会社
情報処理システム、方法およびプログラム
1か月前
オムロン株式会社
安全監視装置、制御方法およびプログラム
1か月前
オムロン株式会社
情報処理システム、方法およびプログラム
1か月前
オムロン株式会社
充電器、電力開閉モジュール、充電システム
1か月前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
2か月前
オムロン株式会社
外装ケースユニット、外装ケース及び電気設備
1か月前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
1か月前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
2か月前
オムロン株式会社
作業認識装置、作業認識方法およびプログラム
20日前
オムロン株式会社
雨滴検出装置の検査装置、検査用治具、検査方法
1か月前
オムロン株式会社
風計測装置、風計測方法および風計測プログラム
1か月前
オムロン株式会社
アンテナ設定方法及びそれを用いた測位システム
2か月前
オムロン株式会社
整列制御装置、整列制御方法、およびプログラム
1か月前
オムロン株式会社
情報処理システム、情報処理方法及びプログラム
20日前
オムロン株式会社
処理システム、処理方法、および処理プログラム
4日前
オムロン株式会社
整流回路、整流回路の制御方法、及び電力システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ