TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025086155
公報種別
公開特許公報(A)
公開日
2025-06-06
出願番号
2023200022
出願日
2023-11-27
発明の名称
ロボット
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
9/06 20060101AFI20250530BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】シリアルリンク機構を有するロボットにおいて、可動部を軽量化すると共に、先端側の位置制御を簡素化する。
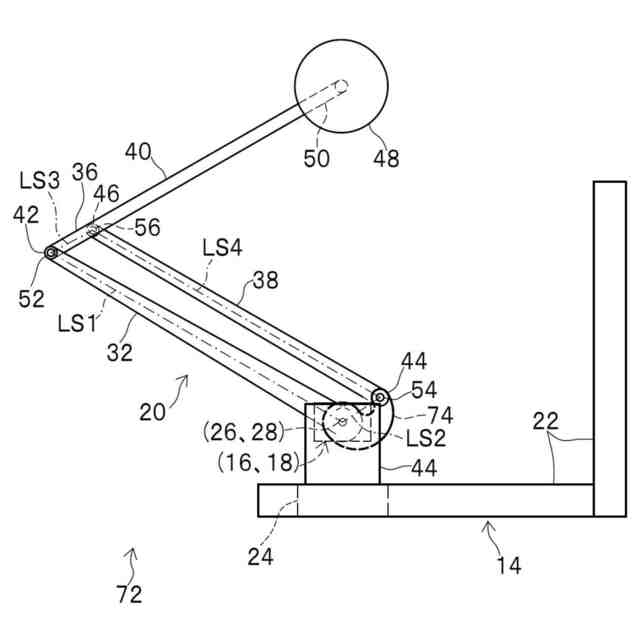
【解決手段】ロボットは、基部と、特定方向の第一駆動軸を有し基部に取り付けられる第一モータと、第一駆動軸と同軸の第二駆動軸を有し基部に取り付けられる第二モータと、第一駆動軸を中心として第一モータにより回転される第一リンクと、第二駆動軸を中心として第二モータによりで回転される第二リンクと、第一リンクに設けられ第一回転軸を有する第一関節と、第二リンクに設けられ第二回転軸を有する第二関節と、第一関節に接続され第一回転軸を中心として回転可能な第三リンクと、第二関節に接続され第二回転軸を中心として回転可能な第四リンクと、第三リンクに設けられ第三回転軸を有し第四リンクが回転可能に接続される第三関節と、第三リンクに設けられるエンドエフェクタ取付部と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
基部と、
特定方向の第一駆動軸を有し前記基部に取り付けられている第一モータと、
前記第一駆動軸と同軸の第二駆動軸を有し前記基部に取り付けられている第二モータと、
前記第一駆動軸を中心として前記第一モータにより前記特定方向を法線とする回転面内で回転される第一リンクと、
前記第二駆動軸を中心として前記第二モータにより前記特定方向を法線とする回転面内で回転される第二リンクと、
前記第一リンクに設けられ第一回転軸を有する第一関節と、
前記第二リンクに設けられ第二回転軸を有する第二関節と、
前記第一関節に接続され前記第一回転軸を中心として回転可能な第三リンクと、
前記第二関節に接続され前記第二回転軸を中心として回転可能な第四リンクと、
前記第三リンクに設けられ第三回転軸を有し前記第四リンクが回転可能に接続される第三関節と、
前記第三リンクに設けられるエンドエフェクタ取付部と、
を有するロボット。
続きを表示(約 380 文字)
【請求項2】
前記第一駆動軸と前記第一回転軸とを結ぶ線分に対し、前記第二回転軸と前記第三回転軸とを結ぶ線分が平行且つ同じ長さである、請求項1に記載のロボット。
【請求項3】
前記第二リンク及び前記第四リンクは直線状である請求項1に記載のロボット。
【請求項4】
前記第二リンクの少なくとも一部は、前記特定方向に見て前記第二駆動軸と前記第二回転軸とを結ぶ線分から逸れる形状に曲がっている請求項1に記載のロボット。
【請求項5】
前記第四リンクの少なくとも一部は、前記特定方向に見て前記第二回転軸と前記第三回転軸とを結ぶ線分から逸れる形状に曲がっている請求項1に記載のロボット。
【請求項6】
前記エンドエフェクタ取付部に取り付けられるエンドエフェクタ、を有する請求項1に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、マニピュレーターを備えたエアホッケーゲーム装置が記載されている。マニピュレーターは、ステックと、このステックを先端に設けたロボットの腕と、ステックに打ち返し動作をさせる駆動手段と、からなる構成である。
【先行技術文献】
【特許文献】
【0003】
特開2000-300823号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のエアホッケーゲーム装置では、マニピュレーターがモニタ盤から延出されている。マニピュレーターは、複数のリンクを直列的に関節で接続した構造の、いわゆるシリアルリンク機構である。
【0005】
シリアルリンク構造においては、先端側のリンクを駆動するための駆動源は、関節の位置に設けられる。この場合、関節は基端(特許文献1の例ではモニタ盤)から離隔しているために、シリアルリンク機構に駆動源の重力のモーメントが作用する。このモーメントによるシリアルリンク機構の変形や変位を抑制するためにリンクや関節を補強すると、シリアルリンク機構の可動部の重量増を招く。
【0006】
また、シリアルリンク機構を有するロボットにおいて、先端側(特許文献1の例ではステック)の位置を制御する際には、より簡易に制御することが望まれる。
【0007】
本開示は、シリアルリンク機構を有するロボットにおいて、可動部を軽量化すると共に、先端側の位置制御を簡素化することを目的とする
【課題を解決するための手段】
【0008】
本開示の一態様は、基部と、特定方向の第一駆動軸を有し前記基部に取り付けられている第一モータと、前記第一駆動軸と同軸の第二駆動軸を有し前記基部に取り付けられている第二モータと、前記第一駆動軸を中心として前記第一モータにより前記特定方向を法線とする回転面内で回転される第一リンクと、前記第二駆動軸を中心として前記第二モータにより前記特定方向を法線とする回転面内で回転される第二リンクと、前記第一リンクに設けられ第一回転軸を有する第一関節と、前記第二リンクに設けられ第二回転軸を有する第二関節と、前記第一関節に接続され前記第一回転軸を中心として回転可能な第三リンクと、前記第二関節に接続され前記第二回転軸を中心として回転可能な第四リンクと、前記第三リンクに設けられ第三回転軸を有し、前記第四リンクが回転可能に接続される第三関節と、前記第三リンクに設けられるエンドエフェクタ取付部と、を有する。
【発明の効果】
【0009】
本開示によれば、シリアルリンク機構を有するロボットにおいて、可動部を軽量化でき、且つ、先端側の位置制御を簡素化できる。
【図面の簡単な説明】
【0010】
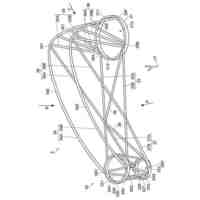
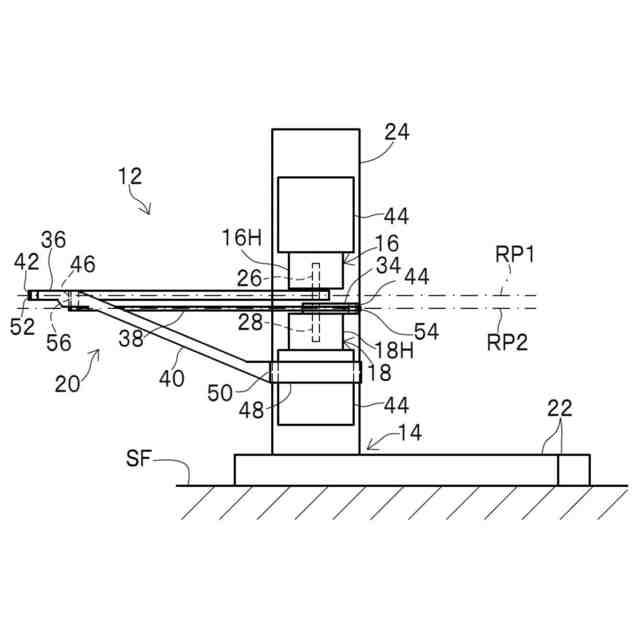
図1は第一実施形態のロボットを示す底面図である。
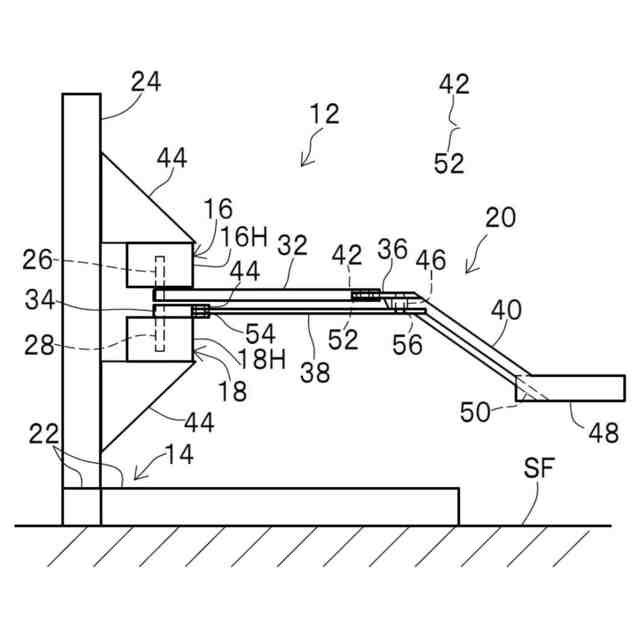
図2は第一実施形態のロボットを示す正面図である。
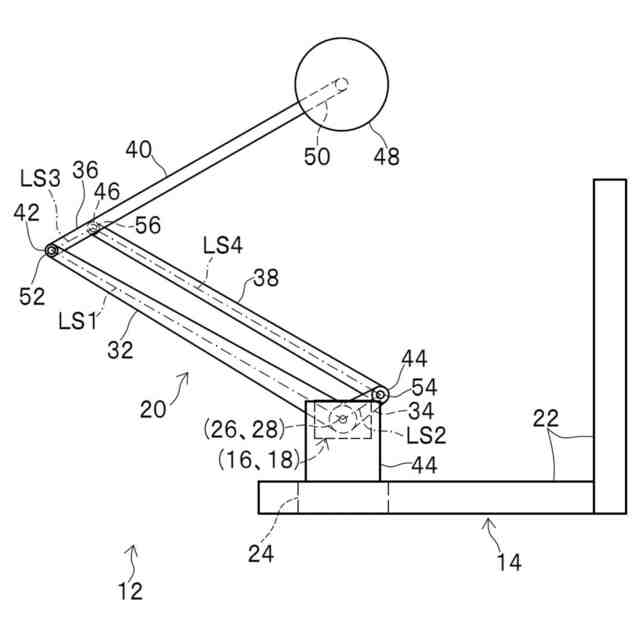
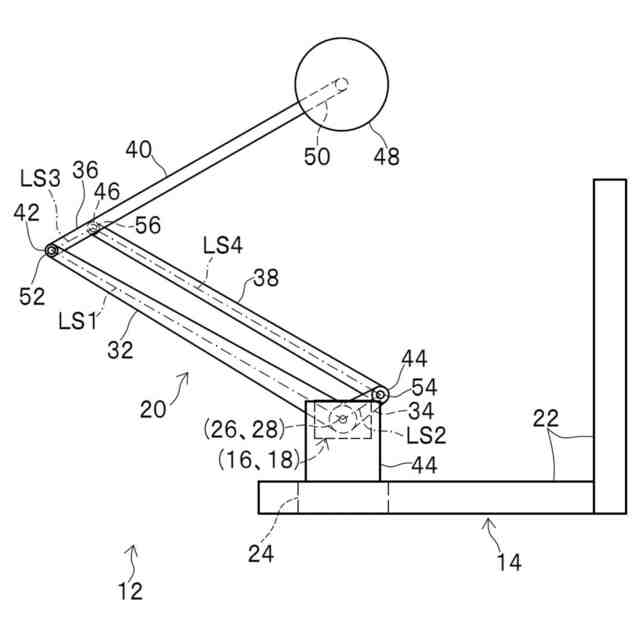
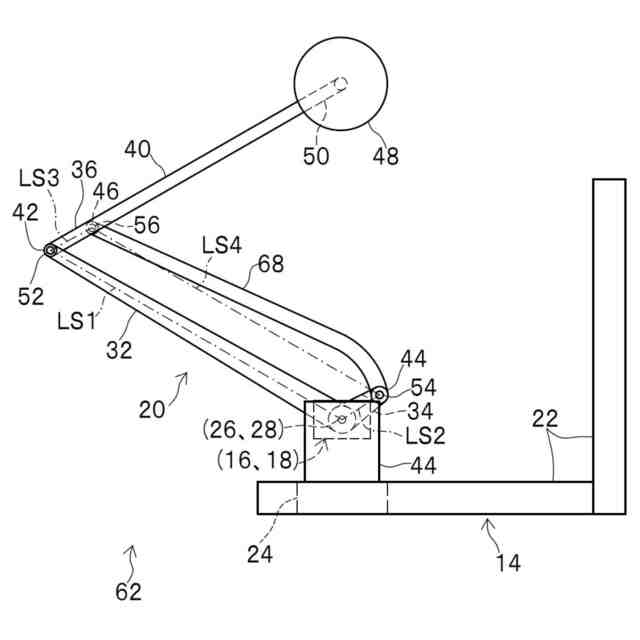
図3は第一実施形態のロボットを示す側面図である。
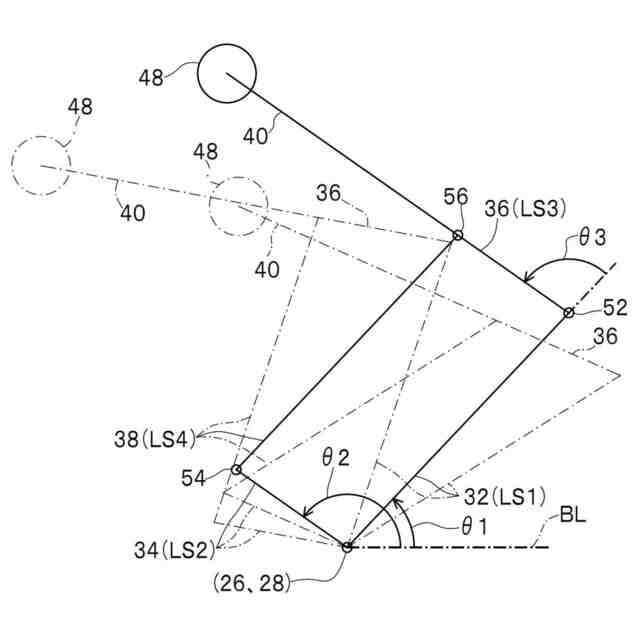
図4は第一実施形態のロボットをリンクの回転状態を示す説明図である。
図5は第二実施形態のロボットを示す底面図である。
図6は第三実施形態のロボットを示す底面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
3日前
日東精工株式会社
電動ドライバ
27日前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
1か月前
東京都公立大学法人
対象物把持装置
1か月前
株式会社スター精機
吸着パッド
26日前
株式会社スター精機
吸着パッド
26日前
工機ホールディングス株式会社
作業機
18日前
工機ホールディングス株式会社
作業機
18日前
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
18日前
住友重機械工業株式会社
ロボット
1か月前
庄内機械株式会社
釘打装置
1か月前
株式会社アイエイアイ
グリッパー
1か月前
株式会社PILLAR
チューブ保持治具
1か月前
オークラ輸送機株式会社
ハンド装置
11日前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社スター精機
産業用ロボット
24日前
株式会社マキタ
電動作業機
1か月前
トヨタ自動車東日本株式会社
搬送治具
1か月前
芝浦機械株式会社
双腕ロボット
1か月前
株式会社リコー
多関節ロボット
1か月前
川崎重工業株式会社
ロボットシステム
12日前
株式会社マキタ
電動作業機
1か月前
株式会社安川電機
ロボット
24日前
株式会社安川電機
ロボット
24日前
株式会社ジャノメ
ロボット
20日前
株式会社安川電機
ロボット
24日前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
セイコーエプソン株式会社
ロボット
6日前
セイコーエプソン株式会社
ロボット
26日前
小倉クラッチ株式会社
ロボット用ツール交換装置
26日前
住友重機械工業株式会社
ロボット及びカバー
1か月前
個人
回転移動式工具ホルダ
1か月前
株式会社マキタ
電動工具
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ