TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087318
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023201887
出願日
2023-11-29
発明の名称
運行管理システム、管理装置、方法、及びプログラム
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
G08G
1/00 20060101AFI20250603BHJP(信号)
要約
【課題】動線上の動作を妨げる要因を直接検知することなく、運行計画を効率的に修正する。
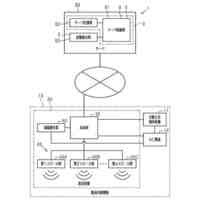
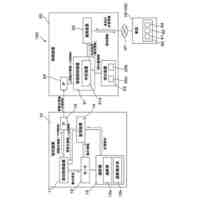
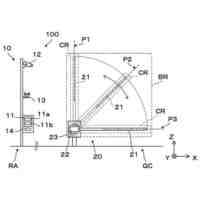
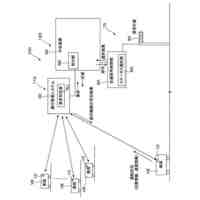
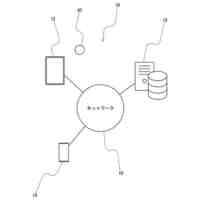
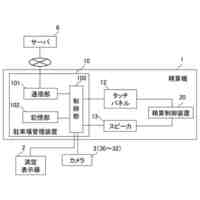
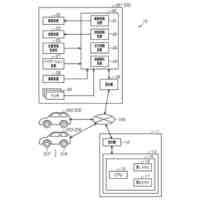
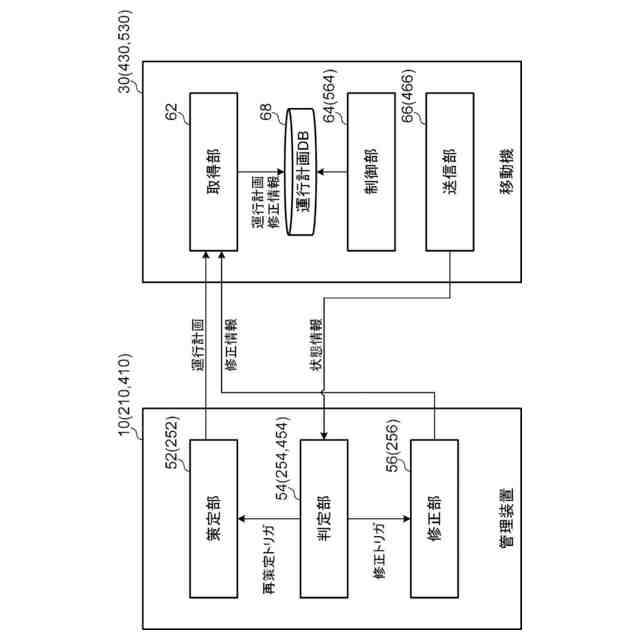
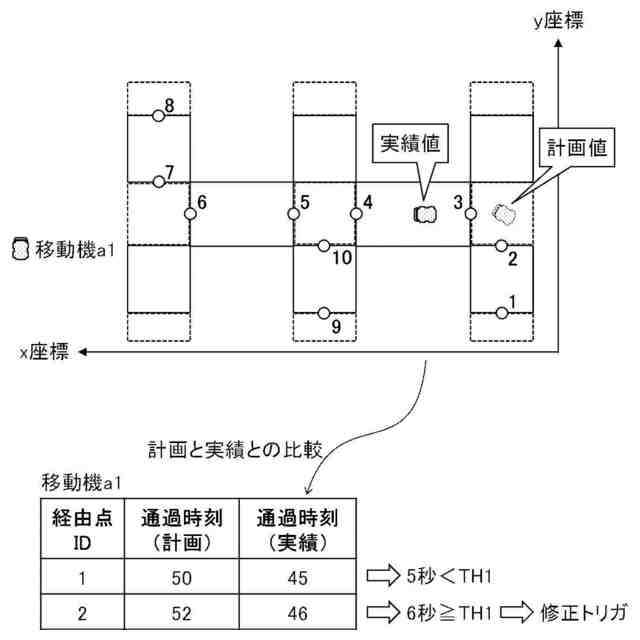
【解決手段】運行管理システム100は、複数の移動機30の各々の運行を管理する管理装置10と、複数の移動機30とを含む。管理装置10は、複数の移動機の各々について運行計画を策定して各移動機30へ送信し、各移動機30から移動機30の状態情報を取得し、状態情報が示す運行実績と運行計画との差に基づいて、運行計画の修正が必要であると判定された場合に、移動機が各経由点を通過する時刻を修正した修正情報を作成して各移動機30に送信する。移動機30は、管理装置10から送信された運行計画及び修正情報に基づいて、移動機の動作を制御し、自機の状態情報を取得して管理装置10へ送信する。
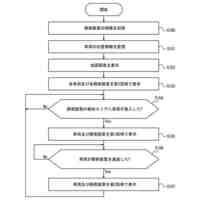
【選択図】図4
特許請求の範囲
【請求項1】
複数の移動機の各々の運行を管理する管理装置と、前記複数の移動機とを含む運行管理システムであって、
前記管理装置は、
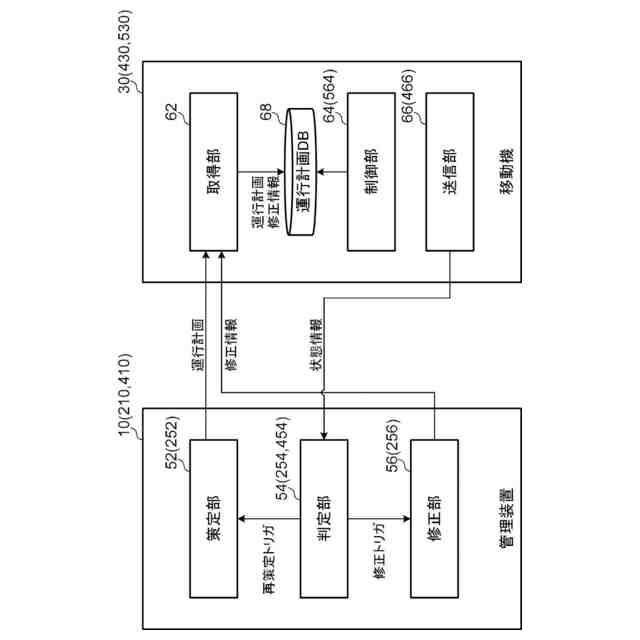
前記複数の移動機の各々について、前記移動機が各経由点を通過する時刻を含む運行計画を策定し、前記複数の移動機の各々に策定した運行計画を送信する策定部と、
前記複数の移動機の各々から、各時刻における、少なくとも前記移動機の位置を含む前記移動機の状態を示す状態情報を取得し、取得した前記状態情報が示す前記移動機の運行実績と前記運行計画との差に基づいて、前記運行計画の修正が必要か否かを判定する判定部と、
前記運行計画の修正が必要であると判定された場合に、前記移動機が各経由点を通過する時刻を修正した修正情報を作成し、作成した前記修正情報を前記複数の移動機の各々に送信する修正部と、を含み、
前記移動機は、
前記管理装置から送信された前記運行計画及び前記修正情報を取得する取得部と、
前記運行計画及び前記修正情報に基づいて、前記移動機の動作を制御する制御部と、
自機の状態を示す前記状態情報を取得して、取得した前記状態情報を前記管理装置へ送信する送信部と、を含む、
運行管理システム。
続きを表示(約 1,500 文字)
【請求項2】
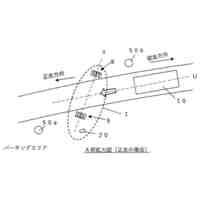
前記修正部は、同一の領域に進入する2以上の移動機において、前記2以上の移動機の各々の進行方向、及び前記2以上の移動機の各々が前記同一の領域を通過するための所要時間に基づいて、前記同一の領域における前記2以上の移動機の干渉を回避するための条件を満たすように、前記2以上の移動機の各々が前記同一の領域の進入口となる経由点を通過する時刻を計算することにより、前記修正情報を作成する請求項1に記載の運行管理システム。
【請求項3】
前記判定部は、前記運行実績と前記運行計画との差が第1閾値以上の場合に、前記運行計画の修正が必要であると判定する請求項1又は請求項2に記載の運行管理システム。
【請求項4】
前記判定部は、前記運行実績と前記運行計画との差が、前記第1閾値よりも大きい第2閾値以上の場合に、前記運行計画を再策定すると判定し、
前記策定部は、前記判定部が前記運行計画を再策定すると判定した場合、前記判定部が取得した前記状態情報に基づいて、前記運行計画を再策定する
請求項3に記載の運行管理システム。
【請求項5】
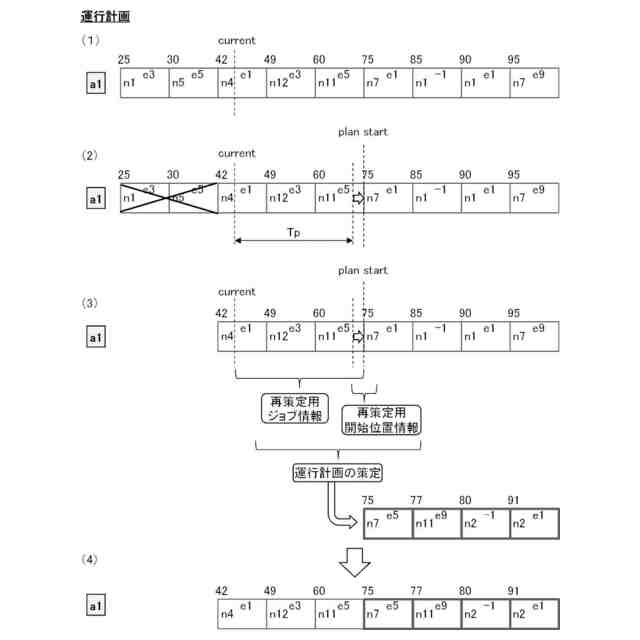
前記策定部は、前記運行計画を再策定する場合、現在時刻から所定時間後までは現在の運行計画に従って移動機が動作するように運行計画を再策定する請求項4に記載の運行管理システム。
【請求項6】
前記運行計画は、所定の経由点における前記移動機による作業を含み、
前記判定部は、取得した前記状態情報に基づく前記作業の進捗率から前記作業の完了時刻を予測し、予測した前記完了時刻が、前記運行計画で策定されている前記作業の完了時刻を超える場合に、前記運行計画の修正が必要であると判定する
請求項1又は請求項2に記載の運行管理システム。
【請求項7】
前記複数の移動機のいずれかを親移動機とし、前記親移動機は、前記判定部及び前記修正部を含む請求項1又は請求項2に記載の運行管理システム。
【請求項8】
前記判定部は、取得した前記状態情報と、前記移動機が現在走行中の領域を通過するための所要時間とに基づいて、前記走行中の領域から次の領域への進入口となる次の経由点を通過する時刻を予測し、予測した時刻と、前記運行計画における前記次の経由点を通過する時刻との差に基づいて、前記運行計画の修正が必要か否かを判定する請求項1又は請求項2に記載の運行管理システム。
【請求項9】
前記送信部は、自機が現在走行中の領域を通過するための所要時間に基づいて、前記走行中の領域から次の領域への進入口となる次の経由点を通過する時刻を予測し、予測した時刻を含む前記状態情報を取得して、取得した前記状態情報を前記管理装置へ送信し、
前記判定部は、前記予測した時刻を前記運行実績とし、前記運行実績と前記運行計画との差に基づいて、前記運行計画の修正が必要か否かを判定する
請求項1又は請求項2に記載の運行管理システム。
【請求項10】
前記制御部は、自機が現在走行中の領域を通過するための所要時間に基づいて、前記走行中の領域から次の領域への進入口となる次の経由点を通過する時刻を予測し、予測した時刻が、前記運行計画が示す前記次の経由点を通過する時刻よりも早い場合、前記次の経由点の手前で前記移動機を待機させるか、又は、前記移動機の速度を下げるように制御し、予測した時刻が、前記運行計画が示す前記次の経由点を通過する時刻よりも遅い場合、前記移動機をそのまま通過させるか、又は、前記移動機の速度を上げるように制御する請求項1又は請求項2に記載の運行管理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、運行管理システム、管理装置、管理方法、及び管理プログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、荷役ロボットやAGV(Automatic Guided Vehicle)等の物品移動機構を停止させることなく、イベントの発生に応じて物品移動機構の動作態様を適切に変更させる制御装置が提案されている。この制御装置は、動作計画修正手段と制御手段とを備える。動作計画修正手段は、物品の移動時における物品移動機構の動線の始点及び終点を含む複数の経由点と、物品移動機構が各経由点を通過する通過時刻とをそれぞれ設定して動作計画を策定する。また、この制御装置は、策定された動作計画の設定値のうち、経由点を変更せずに、通過時刻を遅らせて若しくは早めて動作計画を修正した修正動作計画を策定する。制御手段は、動線での動作を妨げる要因の存否に基づいて、物品移動機構を動作させる。その際、制御手段は、要因が存在しない場合、動作計画に従って物品移動機構の動作を制御し、要因が存在する場合、動作計画修正手段に修正動作計画を策定させ、修正動作計画に従って物品移動機構の動作を制御する(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-029755号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、動線での動作を妨げる要因の存否を判定したうえで、動作計画の修正を行っている。そのため、従来技術では、運行計画の策定に用いる推論モデルの精度に起因する運行計画に対する移動機の遅延や先行、センサによる検出が困難な要因に基づく移動機の遅延等に対して、運行計画を修正することが困難であるという課題がある。
【0005】
本開示は、上記の点に鑑みてなされたものであり、動線上の動作を妨げる要因を直接検知することなく、運行計画を効率的に修正することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る運行管理システムは、複数の移動機の各々の運行を管理する管理装置と、前記複数の移動機とを含む運行管理システムであって、前記管理装置は、前記複数の移動機の各々について、前記移動機が各経由点を通過する時刻を含む運行計画を策定し、前記複数の移動機の各々に策定した運行計画を送信する策定部と、前記複数の移動機の各々から、各時刻における、少なくとも前記移動機の位置を含む前記移動機の状態を示す状態情報を取得し、取得した前記状態情報が示す前記移動機の運行実績と前記運行計画との差に基づいて、前記運行計画の修正が必要か否かを判定する判定部と、前記運行計画の修正が必要であると判定された場合に、前記移動機が各経由点を通過する時刻を修正した修正情報を作成し、作成した前記修正情報を前記複数の移動機の各々に送信する修正部と、を含み、前記移動機は、前記管理装置から送信された前記運行計画及び前記修正情報を取得する取得部と、前記運行計画及び前記修正情報に基づいて、前記移動機の動作を制御する制御部と、自機の状態を示す前記状態情報を取得して、取得した前記状態情報を前記管理装置へ送信する送信部と、を含む。
【0007】
本開示に係る管理装置は、複数の移動機の各々について、前記移動機が各経由点を通過する時刻を含む運行計画を策定し、前記複数の移動機の各々に策定した運行計画を送信する策定部と、前記複数の移動機の各々から、各時刻における、少なくとも前記移動機の位置を含む前記移動機の状態を示す状態情報を取得し、取得した前記状態情報が示す前記移動機の運行実績と前記運行計画との差に基づいて、前記運行計画の修正が必要か否かを判定する判定部と、前記運行計画の修正が必要であると判定された場合に、前記移動機が各経由点を通過する時刻を修正した修正情報を作成し、作成した前記修正情報を前記複数の移動機の各々に送信する修正部と、を含む。
【0008】
本開示に係る管理方法は、複数の移動機の各々について、前記移動機が各経由点を通過する時刻を含む運行計画を策定し、前記複数の移動機の各々に策定した運行計画を送信し、前記複数の移動機の各々から、各時刻における、少なくとも前記移動機の位置を含む前記移動機の状態を示す状態情報を取得し、取得した前記状態情報が示す前記移動機の運行実績と前記運行計画との差に基づいて、前記運行計画の修正が必要か否かを判定し、前記運行計画の修正が必要であると判定された場合に、前記移動機が各経由点を通過する時刻を修正した修正情報を作成し、作成した前記修正情報を前記複数の移動機の各々に送信する処理をコンピュータが実行する方法である。
【0009】
本開示に係る管理プログラムは、コンピュータを、複数の移動機の各々について、前記移動機が各経由点を通過する時刻を含む運行計画を策定し、前記複数の移動機の各々に策定した運行計画を送信する策定部、前記複数の移動機の各々から、各時刻における、少なくとも前記移動機の位置を含む前記移動機の状態を示す状態情報を取得し、取得した前記状態情報が示す前記移動機の運行実績と前記運行計画との差に基づいて、前記運行計画の修正が必要か否かを判定する判定部、及び、前記運行計画の修正が必要であると判定された場合に、前記移動機が各経由点を通過する時刻を修正した修正情報を作成し、作成した前記修正情報を前記複数の移動機の各々に送信する修正部として機能させるためのプログラムである。
【発明の効果】
【0010】
本開示に係る運行管理システム、管理装置、方法、及びプログラムによれば、動線上の動作を妨げる要因を直接検知することなく、運行計画を効率的に修正することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
路面投影装置
11日前
個人
防犯に特化したアプリケーション
19日前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
17日前
ニッタン株式会社
発信機
6日前
ニッタン株式会社
発信機
2か月前
東京都公立大学法人
液滴検出装置
19日前
TOA株式会社
拡声放送システム
10日前
個人
逆走・正走車両検出システム
2か月前
日本信号株式会社
情報提供システム
2か月前
株式会社JVCケンウッド
警報装置
5日前
アズビル株式会社
建物管理システム
1か月前
日本信号株式会社
情報提供システム
4日前
株式会社アジラ
データ転送システム
10日前
日本信号株式会社
信号情報システム
4日前
ホーチキ株式会社
異常報知設備
1か月前
ホーチキ株式会社
異常報知設備
2か月前
株式会社JVCケンウッド
情報処理装置
1か月前
個人
磁気・光学誘導路線による車両の運行制御
2か月前
トヨタ自動車株式会社
回避動作判別装置
4日前
日本信号株式会社
交通信号制御システム
4日前
株式会社フィットネスワン
見守りシステム
1か月前
株式会社豊田自動織機
制御システム
10日前
トヨタ自動車株式会社
配車システム
2か月前
ホーチキ株式会社
非常通報システム
1か月前
ホーチキ株式会社
火災検出システム
5日前
Adora株式会社
アプリ使用制御システム
1か月前
ユニティガードシステム株式会社
警備監視システム
1か月前
トヨタ自動車株式会社
障害物検知装置
26日前
シャープ株式会社
駐車場管理装置
1か月前
能美防災株式会社
非常報知システム
2か月前
個人
注意喚起システム及び注意喚起装置
10日前
能美防災株式会社
火災感知器窓部清掃システム
24日前
大和ハウス工業株式会社
住環境管理設備
5日前
トヨタ自動車株式会社
方法
3日前
株式会社アドヴィックス
走行支援システム
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ