TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025090301
公報種別
公開特許公報(A)
公開日
2025-06-17
出願番号
2023205461
出願日
2023-12-05
発明の名称
障害物検知装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
G08G
1/16 20060101AFI20250610BHJP(信号)
要約
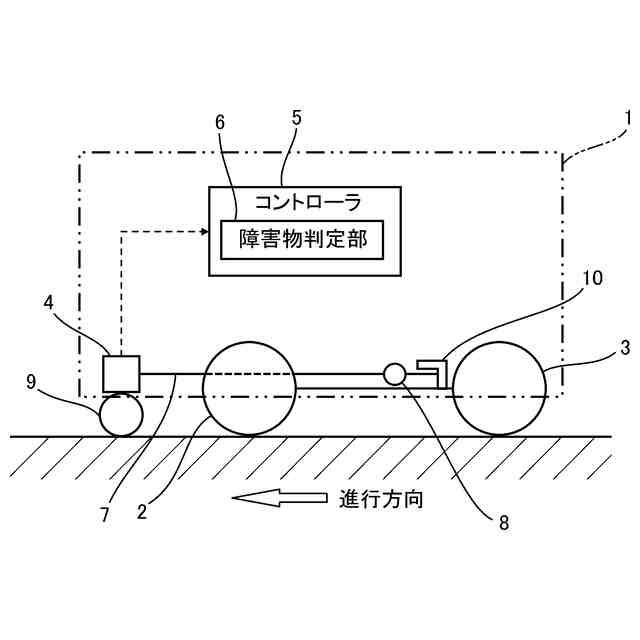
【課題】移動体の姿勢の変化に伴って、障害物を検出するための検出部が地面を向くことを抑制できる障害物検知装置を提供する。
【解決手段】移動体1の進行方向における前方側の障害物を検出する検出部4と、検出部4の検出データに基づいて障害物の有無を判定する障害物判定部6とを備えた障害物検知装置であって、検出部4による検出方向を上下方向に変更可能に検出部を支持する可動支持機構7と、移動体1の進行方向における前方側の路面に対する検出部4の検出角度が、予め定められた所定角度以上となるように検出部4を支持する制限機構9,10とを備えている。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の進行方向における前方側の障害物を検出する検出部と、前記検出部の検出データに基づいて前記障害物の有無を判定する障害物判定部とを備えた障害物検知装置であって、
前記検出部による検出方向を上下方向に変更可能に前記検出部を支持する可動支持機構と、
前記移動体の進行方向における前方側の路面に対する前記検出部の検出角度が、予め定められた所定角度以上となるように前記検出部を支持する制限機構と
を備えている
ことを特徴とする障害物検知装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両やロボットなどの移動体の進行方向における前方側の障害物を検知する装置に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、移動体に固定され移動体の前方の計測空間領域内の障害物を検出する測距装置と、その測距装置の傾斜角度を検出する傾き検知部とを備え、移動体の姿勢の変化に伴って測距装置の傾斜角度が変化した場合に、計測空間領域の前方方向または幅方向への深度に応じて、計測空間領域の底面の位置を変更することにより、地面を障害物と誤判定することを抑制する障害物判定装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-59150号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された障害物判定装置は、障害物を検出するための測距装置が移動体に固定されているため、その測距装置によって検出される領域も、移動体の姿勢に応じて変化する。そのため、特許文献1に記載された障害物判定装置は、測距装置によって検出される領域のうち、障害物の判定を行うための領域を、測距装置の傾きに応じて変更するように構成されている。したがって、特許文献1に記載された障害物判定装置は、移動体の姿勢が変化する都度、測距装置によって検出されたデータと、傾き検知部によって検出されたデータとに基づいて、障害物の判定を行うための領域を変更する必要があり、障害物の有無を判定するための制御が煩雑になる可能性がある。
【0005】
本発明は、上記の技術的課題に着目してなされたものであって、移動体の姿勢の変化に伴って、障害物を検出するための検出部が地面を向くことを抑制できる障害物検知装置を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
本発明は、上記の目的を達成するために、移動体の進行方向における前方側の障害物を検出する検出部と、前記検出部の検出データに基づいて前記障害物の有無を判定する障害物判定部とを備えた障害物検知装置であって、前記検出部による検出方向を上下方向に変更可能に前記検出部を支持する可動支持機構と、前記移動体の進行方向における前方側の路面に対する前記検出部の検出角度が、予め定められた所定角度以上となるように前記検出部を支持する制限機構とを備えていることを特徴とするものである。
【発明の効果】
【0007】
本発明によれば、移動体の進行方向における前方側の障害物を検出するための検出部は、可動支持機構によって、その検出方向を上下方向に変更可能に支持され、かつ制限機構によって、移動体の進行方向における前方側の路面に対する検出部の検出角度が、所定角度以上となるように支持されている。したがって、移動体の姿勢が変化した場合であっても、前方側の路面に対して検出部の検出方向が所期の方向よりも路面側に向くことを抑制できる。その結果、地面を障害物として誤判定することを抑制できる。
【図面の簡単な説明】
【0008】
本発明の実施形態における障害物検知装置を搭載した移動体の一例を模式的に示す図である。
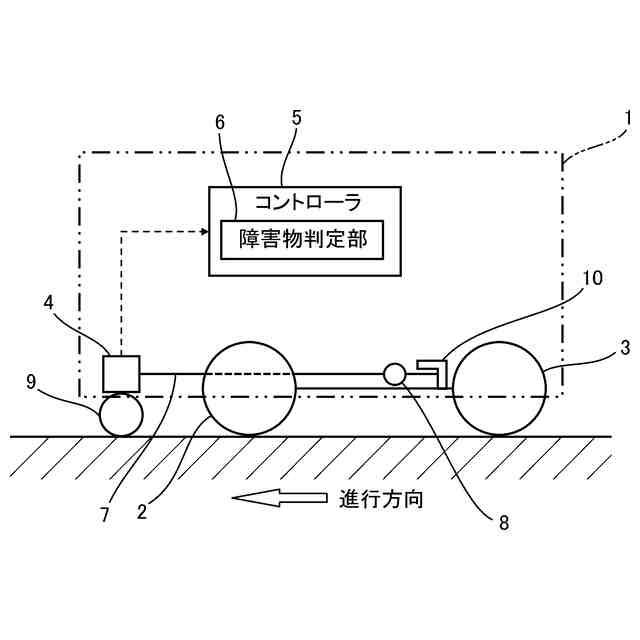
(a)は、移動体が登坂路を走行し始めた状態を模式的に示す図であり、(b)は、移動体が降坂路を走行し終える状態を模式的に示す図である。
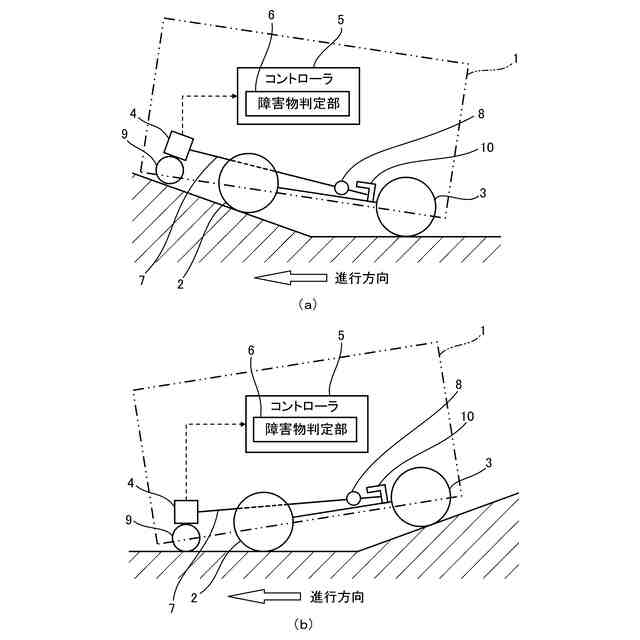
(a)は、移動体が登坂路を走行し終える状態を模式的に示す図であり、(b)は、移動体が降坂路を走行し始めた状態を模式的に示す図である。
【発明を実施するための形態】
【0009】
本発明を図に示す実施形態に基づいて説明する。なお、以下に説明する実施形態は本発明を具体化した場合の一例に過ぎないのであって、本発明を限定するものではない。
【0010】
図1には、本発明の実施形態における障害物検知装置を搭載した移動体の一例を模式的に示してある。図1に示す移動体1は、工場、公共施設、商業施設、飲食店などの屋内を移動する搬送用ロボットや、公道などの屋外を移動する自動車などの移動体であってよい。また、障害物検知装置は、移動体1の進行方向における前方側の障害物を検出するものであって、移動体1は、その検出結果に基づいて、自動的に旋回して障害物を避け、または減速あるいは停止して、障害物が通過することを待つように走行する、いわゆる自動運転する移動体(例えば、ロボット)であってもよく、障害物がある旨を運転者に通知するなどして運転者が旋回操作や減速操作などを行う手動運転の移動体であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ