TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062942
公報種別
公開特許公報(A)
公開日
2025-04-15
出願番号
2023172330
出願日
2023-10-03
発明の名称
制御装置、方法、及びプログラム
出願人
オムロン株式会社
,
国立大学法人 奈良先端科学技術大学院大学
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
13/00 20060101AFI20250408BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
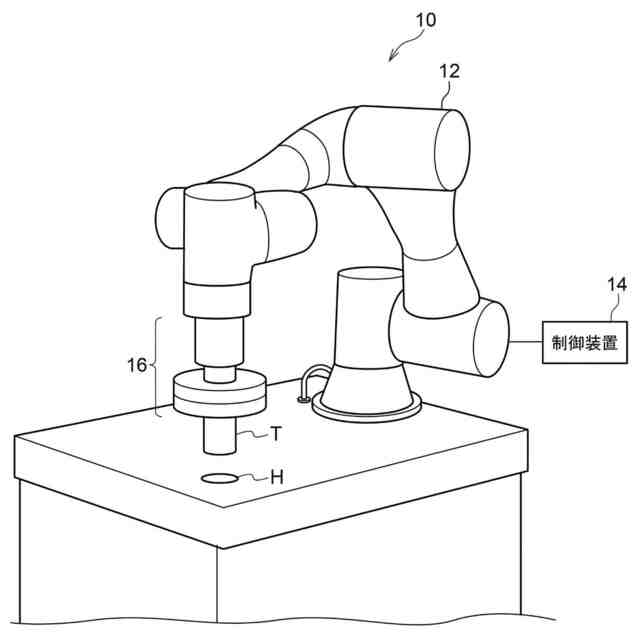
【課題】ロボットが環境に関する情報を事前に取得することができない場合に、ロボットが硬い状態で障害物に接触することを抑制しつつタスクを実行する。
【解決手段】制御装置は、ロボットが備える制御対象部位の位置データを取得する。そして、制御装置は、位置データが表す位置に制御対象部位が過去に訪れたことが無い場合又は位置データにおいて制御対象部位が障害物に接触する度合いが所定以上である場合には、制御対象部位の柔らかさの度合いが所定値以上である第1モードとなるように制御対象部位を制御する。また、制御装置は、位置データが表す位置に制御対象部位が過去に訪れたことがある場合であって、かつ位置データにおいて制御対象部位が障害物に接触する度合いが所定未満である場合には、制御対象部位の硬さの度合いが所定値以上である第2モードとなるように制御対象部位を制御する。
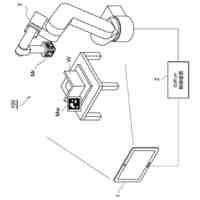
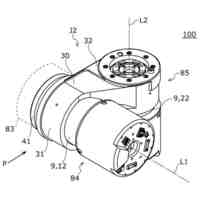
【選択図】図1
特許請求の範囲
【請求項1】
ロボットが備える制御対象部位の位置データを取得する取得部と、
前記位置データが表す位置に前記制御対象部位が過去に訪れたことが無い場合又は前記位置において前記制御対象部位が障害物に接触する度合いが所定以上である場合には、前記制御対象部位の柔らかさの度合いが所定値以上である第1モードとなるように前記制御対象部位を制御し、
前記位置データが表す位置に前記制御対象部位が過去に訪れたことがある場合であって、かつ前記位置において前記制御対象部位が障害物に接触する度合いが所定未満である場合には、前記制御対象部位の硬さの度合いが所定値以上である第2モードとなるように前記制御対象部位を制御する制御部と、
を備える制御装置。
続きを表示(約 2,100 文字)
【請求項2】
前記制御対象部位の位置データが入力されると前記制御対象部位の変形度合いの予測値を表す予測変形度合データが出力されるダイナミクスモデルに対して、前記取得部により取得された前記位置データを入力することにより、前記制御対象部位が障害物に接触する度合いとして、前記予測変形度合データを生成する生成部を更に備え、
前記制御部は、前記ロボットを制御する際に、生成された前記予測変形度合データが所定閾値以上である場合には、前記第1モードとなるように前記制御対象部位を制御し、生成された前記予測変形度合データが所定閾値未満である場合には、前記第2モードとなるように前記制御対象部位を制御する、
請求項1に記載の制御装置。
【請求項3】
学習部を更に備え、
前記制御部は、前記制御対象部位を移動させている最中に得られた、前記制御対象部位の位置データと前記制御対象部位の実際の変形度合いを表す正解変形度合データとの組み合わせを取得し、前記組み合わせを記憶部へ格納し、
前記学習部は、前記記憶部から前記組み合わせを読み出し、前記組み合わせに基づいて、前記ダイナミクスモデルを学習させる、
請求項2に記載の制御装置。
【請求項4】
前記学習部は、モデルベース強化学習において、前記第1モードと前記第2モードとの切り替えを表す前記ロボットの離散値の行動を表す離散行動データを固定しながら、前記ロボットの連続値の行動を表す連続行動データ及び前記離散行動データを最適化し、
前記制御部は、最適化された前記連続行動データ及び前記離散行動データに応じて、前記ロボットの動作を制御する、
請求項3に記載の制御装置。
【請求項5】
前記学習部は、
時刻tの前記ロボットの連続値の状態を表す連続状態データと時刻tの前記連続行動データが入力されると時刻t+1の前記連続状態データが出力される前記ダイナミクスモデルに対して、前時刻の前記連続状態データと前時刻の前記連続行動データを繰り返し入力することにより、時刻t+1から時刻t+Hまでの前記連続状態データの系列を取得し、
時刻t+1から時刻t+Hまでの前記離散行動データの系列を固定し、
取得された時刻t+1から時刻t+Hまでの前記連続状態データの系列と、固定された時刻t+1から時刻t+Hまでの前記離散行動データとに基づいて、モデルベース強化学習における報酬の総和を表す評価関数が最大となるような、時刻t+1から時刻t+Hまでの前記連続行動データの系列と時刻t+1から時刻t+Hまでの前記離散行動データの系列とを取得し、
前記制御部は、時刻t+1から時刻t+Hまでの前記連続行動データの系列と時刻t+1から時刻t+Hまでの前記離散行動データの系列とに応じて、前記ロボットの動作を制御する、
請求項4に記載の制御装置。
【請求項6】
前記制御対象部位は、前記ロボットが備えるアームとグリッパとを含む部位を表し、
前記第1モードは、前記アームと前記グリッパとが弾性体によって接続されるモードであり、
前記第2モードは、前記アームと前記グリッパとが一体となるように接続されるモードである、
請求項1又は請求項2に記載の制御装置。
【請求項7】
ロボットが備える制御対象部位の位置データを取得し、
前記位置データが表す位置に前記制御対象部位が過去に訪れたことが無い場合又は前記位置において前記制御対象部位が障害物に接触する度合いが所定以上である場合には、前記制御対象部位の柔らかさの度合いが所定値以上である第1モードとなるように前記制御対象部位を制御し、
前記位置データが表す位置に前記制御対象部位が過去に訪れたことがある場合であって、かつ前記位置において前記制御対象部位が障害物に接触する度合いが所定未満である場合には、前記制御対象部位の硬さの度合いが所定値以上である第2モードとなるように前記制御対象部位を制御する、
処理をコンピュータが実行する制御方法。
【請求項8】
ロボットが備える制御対象部位の位置データを取得し、
前記位置データが表す位置に前記制御対象部位が過去に訪れたことが無い場合又は前記位置において前記制御対象部位が障害物に接触する度合いが所定以上である場合には、前記制御対象部位の柔らかさの度合いが所定値以上である第1モードとなるように前記制御対象部位を制御し、
前記位置データが表す位置に前記制御対象部位が過去に訪れたことがある場合であって、かつ前記位置において前記制御対象部位が障害物に接触する度合いが所定未満である場合には、前記制御対象部位の硬さの度合いが所定値以上である第2モードとなるように前記制御対象部位を制御する、
処理をコンピュータに実行させるための制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、方法、及びプログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、ロボットの手首部分が柔軟であるロボットシステムが知られている(例えば、非特許文献1を参照)。
【先行技術文献】
【非特許文献】
【0003】
Hamaya, M., Lee, R., Tanaka, K., von Drigalski, F., Nakashima, C., Shibata, Y., & Ijiri, Y. (2020, May). "Learning robotic assembly tasks with lower dimensional systems by leveraging physical softness and environmental constraints." In 2020 IEEE International Conference on Robotics and Automation (ICRA) (pp. 7747-7753). IEEE.
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ロボットが環境に関する情報を事前に取得することができない状況下において、ロボットがタスクを実行しなければならない場合がある。例えば、ロボットがペグを把持し、そのペグを穴に挿入するタスクであるペグインホールタスク等を実行する際に、ロボットのグリッパの現在位置から穴の位置までの経路において障害物が存在している場合等がある。このような状況下において、ロボットが障害物の位置に関する情報を事前に取得できない場合には、ロボットのグリッパが障害物に接触してしまう可能性がある。このような場合においては、ロボットのグリッパ部分は柔軟な方が好ましい。グリッパ部分が硬い場合には、グリッパが障害物に接触した際の衝撃が大きく、その衝撃により破損が発生してしまう可能性もあるためである。一方で、ペグインホールタスクの全工程に渡ってロボットのグリッパ部分が柔軟である場合には、当該グリッパを移動させる際に振動が発生する又は所望の位置にグリッパを正確に移動させることが困難となる、といった事態が発生し得る。
【0005】
上記非特許文献1に開示されている技術は、柔軟性を有するロボットシステムに関する技術であるものの、ロボットが障害物の位置に関する情報を事前に取得できない場合にロボットにどのような動作をさせるのかについては考慮されていない。
【0006】
本開示は、上記の点に鑑みてなされたものであり、ロボットが環境に関する情報を事前に取得することができない場合に、ロボットが硬い状態で障害物に接触することを抑制しつつタスクを実行することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本開示の制御装置は、ロボットが備える制御対象部位の位置データを取得する取得部と、前記位置データが表す位置に前記制御対象部位が過去に訪れたことが無い場合又は前記位置データにおいて前記制御対象部位が障害物に接触する度合いが所定以上である場合には、前記制御対象部位の柔らかさの度合いが所定値以上である第1モードとなるように前記制御対象部位を制御し、前記位置データが表す位置に前記制御対象部位が過去に訪れたことがある場合であって、かつ前記位置データにおいて前記制御対象部位が障害物に接触する度合いが所定未満である場合には、前記制御対象部位の硬さの度合いが所定値以上である第2モードとなるように前記制御対象部位を制御する制御部と、を備える制御装置である。
【0008】
また、本開示の制御方法は、ロボットが備える制御対象部位の位置データを取得し、前記位置データが表す位置に前記制御対象部位が過去に訪れたことが無い場合又は前記位置データにおいて前記制御対象部位が障害物に接触する度合いが所定以上である場合には、前記制御対象部位の柔らかさの度合いが所定値以上である第1モードとなるように前記制御対象部位を制御し、前記位置データが表す位置に前記制御対象部位が過去に訪れたことがある場合であって、かつ前記位置データにおいて前記制御対象部位が障害物に接触する度合いが所定未満である場合には、前記制御対象部位の硬さの度合いが所定値以上である第2モードとなるように前記制御対象部位を制御する、処理をコンピュータが実行する制御方法である。
【0009】
また、本開示の制御プログラムは、ロボットが備える制御対象部位の位置データを取得し、前記位置データが表す位置に前記制御対象部位が過去に訪れたことが無い場合又は前記位置データにおいて前記制御対象部位が障害物に接触する度合いが所定以上である場合には、前記制御対象部位の柔らかさの度合いが所定値以上である第1モードとなるように前記制御対象部位を制御し、前記位置データが表す位置に前記制御対象部位が過去に訪れたことがある場合であって、かつ前記位置データにおいて前記制御対象部位が障害物に接触する度合いが所定未満である場合には、前記制御対象部位の硬さの度合いが所定値以上である第2モードとなるように前記制御対象部位を制御する、処理をコンピュータに実行させるための制御プログラムである。
【発明の効果】
【0010】
本開示の制御装置、方法、及びプログラムによれば、ロボットが環境に関する情報を事前に取得することができない場合に、ロボットが硬い状態で障害物に接触することを抑制しつつタスクを実行することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
27日前
トヨタ自動車株式会社
関節機構
1日前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
10日前
学校法人五島育英会
アーム機構
1日前
住友重機械工業株式会社
ロボット
21日前
株式会社アイエイアイ
グリッパー
16日前
株式会社イノウ
給油口キャップ用開閉具
28日前
川崎重工業株式会社
制動システム
27日前
株式会社PILLAR
チューブ保持治具
6日前
庄内機械株式会社
釘打装置
14日前
株式会社不二越
垂直多関節ロボット
28日前
オークラ輸送機株式会社
ハンド装置
9日前
株式会社マキタ
電動作業機
2日前
アイホン株式会社
ネジ締めカウントシステム
29日前
株式会社マキタ
電動作業機
2日前
トヨタ自動車東日本株式会社
搬送治具
14日前
株式会社リコー
多関節ロボット
今日
芝浦機械株式会社
双腕ロボット
20日前
トヨタ自動車株式会社
荷姿影響緩和方法
17日前
パナソニック株式会社
工具
28日前
パナソニック株式会社
工具
28日前
個人
回転移動式工具ホルダ
8日前
株式会社マキタ
電動工具
14日前
住友重機械工業株式会社
ロボット及びカバー
21日前
株式会社ダイヘン
端末装置
14日前
株式会社マキタ
打ち込み工具
29日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
21日前
株式会社マキタ
打ち込み工具
14日前
株式会社マキタ
打ち込み工具
14日前
住友重機械工業株式会社
アクチュエータ支持部材
20日前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
インパクト工具
1か月前
DIC株式会社
ロボット用保護具・プロテクタ
今日
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ