TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025063821
公報種別
公開特許公報(A)
公開日
2025-04-16
出願番号
2024104127
出願日
2024-06-27
発明の名称
インパクト工具
出願人
株式会社マキタ
代理人
弁理士法人酒井国際特許事務所
主分類
B25B
21/02 20060101AFI20250409BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】カムアウト現象の発生を抑制すること。
【解決手段】インパクト工具は、18V以上の電圧が入力されるモータと、モータにより回転されるスピンドルと、スピンドルに形成されるスピンドル溝と、スピンドル溝に保持されるボールと、ボールを介してスピンドルに支持されるハンマと、ハンマを前方に付勢するスプリングと、ハンマにより回転方向に打撃されるアンビルと、を備える。ハンマがアンビルの打撃を開始するときにアンビルに作用するトルクを示す打撃開始トルクは、1100N・mm以下である。
【選択図】図23
特許請求の範囲
【請求項1】
18V以上の電圧が入力されるモータと、
前記モータにより回転されるスピンドルと、
前記スピンドルに形成されるスピンドル溝と、
前記スピンドル溝に保持されるボールと、
前記ボールを介して前記スピンドルに支持されるハンマと、
前記ハンマを前方に付勢するスプリングと、
前記ハンマにより回転方向に打撃されるアンビルと、を備え、
前記ハンマが前記アンビルの打撃を開始するときに前記アンビルに作用するトルクを示す打撃開始トルクは、1100N・mm以下である、
インパクト工具。
続きを表示(約 1,300 文字)
【請求項2】
バッテリパックが装着されるバッテリ装着部を備え、
前記バッテリパックの定格電圧が18V以上である、
請求項1に記載のインパクト工具。
【請求項3】
前記スピンドル溝の深さは、前記スピンドルの軸方向の位置により異なる、
請求項1に記載のインパクト工具。
【請求項4】
モータと、
前記モータにより回転されるスピンドルと、
前記スピンドルに形成されるスピンドル溝と、
前記スピンドル溝に保持されるボールと、
前記ボールの少なくとも一部が配置されるハンマ溝を有し、前記ボールを介して前記スピンドルに支持されるハンマと、
前記ハンマを前方に付勢するスプリングと、
前記ハンマにより回転方向に打撃されるアンビルと、を備え、
前記スピンドルに対して前記ハンマが最も後方に移動した時点を最大ストローク時とし、
前記ボールと前記ハンマ溝との接触点を通り前記スピンドルの回転軸を中心とする円の接線と平行な方向を接線ベクトルとし、
前記ボールから前記ハンマとの前記接触点に荷重が伝わる方向を荷重ベクトルとした場合、
前記接線ベクトルと前記荷重ベクトルとがなす角度は、50度以下である、
インパクト工具。
【請求項5】
前記スピンドル溝の端部は、前記スピンドル溝の中央部よりも後方に配置され、
前記スピンドルに対して前記ハンマが後方に移動するときに、前記ボールが前記スピンドル溝の端部に移動し、
前記ボールが前記スピンドル溝の端部に近付くほど前記角度が小さくなる、
請求項4に記載のインパクト工具。
【請求項6】
18V以上の電圧が入力されるモータと、
前記モータにより回転されるスピンドルと、
前記スピンドルに形成されるスピンドル溝と、
前記スピンドル溝に保持されるボールと、
前記ボールを介して前記スピンドルに支持されるハンマと、
前記ハンマを前方に付勢するスプリングと、
前記ハンマにより回転方向に打撃されるアンビルと、を備え、
最大締付トルクが220N・mよりも高く、
前記ハンマが前記アンビルの打撃を開始するときに前記アンビルに作用するトルクを示す打撃開始トルクは、1300N・mm以下である、
インパクト工具。
【請求項7】
バッテリパックが装着されるバッテリ装着部を備え、
前記バッテリパックの定格電圧が18V以上である、
請求項6に記載のインパクト工具。
【請求項8】
前記スピンドル溝の深さは、前記スピンドルの軸方向の位置により異なる、
請求項6に記載のインパクト工具。
【請求項9】
前記最大締付トルクが230N・m以上である、
請求項6に記載のインパクト工具。
【請求項10】
前記最大締付トルク(N・mm)を前記打撃開始トルク(N・mm)で割った値が165よりも大きい、
請求項6に記載のインパクト工具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、インパクト工具に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
インパクト工具に係る技術分野において、特許文献1に開示されているようなインパクト回転工具が知られている。
【先行技術文献】
【特許文献】
【0003】
特許第4600562号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
インパクト工具を用いる作業性の向上のために、先端工具がねじの頭部に形成されている十字溝から外れてしまうカムアウト現象の発生を抑制できる技術が要望される。
【0005】
本明細書で開示する技術は、カムアウト現象の発生を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本明細書は、インパクト工具を開示する。インパクト工具は、18V以上の電圧が入力されるモータと、モータにより回転されるスピンドルと、スピンドルに形成されるスピンドル溝と、スピンドル溝に保持されるボールと、ボールを介してスピンドルに支持されるハンマと、ハンマを前方に付勢するスプリングと、ハンマにより回転方向に打撃されるアンビルと、を備える。ハンマがアンビルの打撃を開始するときにアンビルに作用するトルクを示す打撃開始トルクは、1100N・mm以下である。
【発明の効果】
【0007】
本明細書で開示する技術によれば、カムアウト現象の発生が抑制される。
【図面の簡単な説明】
【0008】
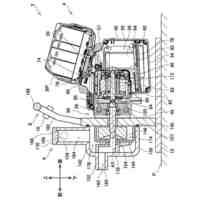
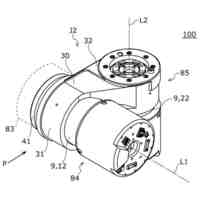
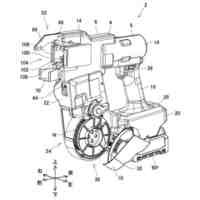
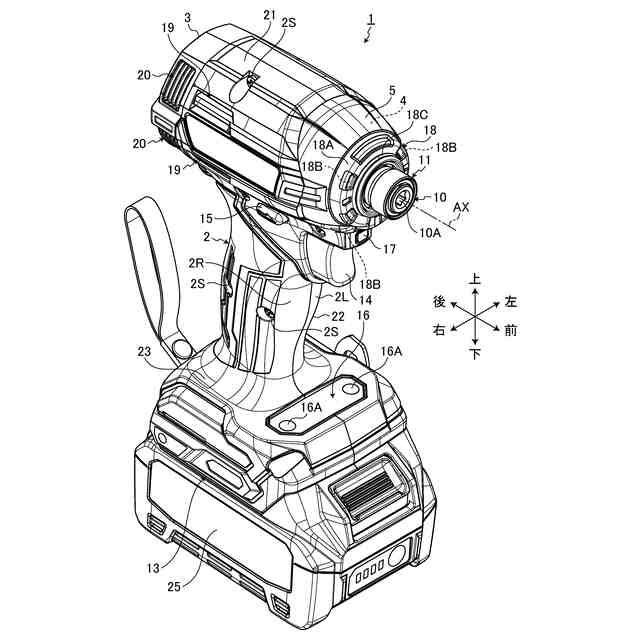
図1は、実施形態に係るインパクト工具を示す前方からの斜視図である。
図2は、実施形態に係るインパクト工具の上部を示す側面図である。
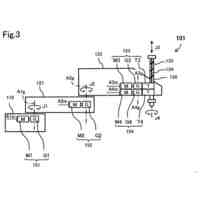
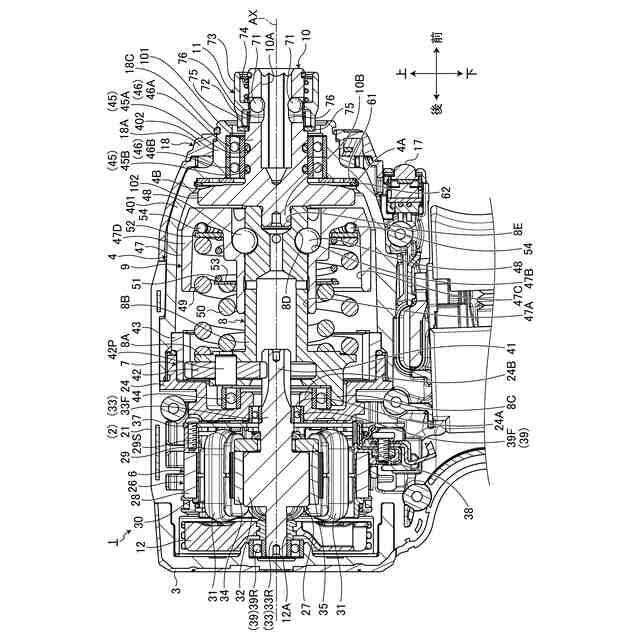
図3は、実施形態に係るインパクト工具の上部を示す縦断面図である。
図4は、実施形態に係るインパクト工具の上部を示す横断面図である。
図5は、実施形態に係る打撃機構の一部を示す前方からの分解斜視図である。
図6は、実施形態に係る打撃機構の一部を示す後方からの分解斜視図である。
図7は、実施形態に係るスピンドルを示す側面図である。
図8は、実施形態に係るスピンドルを示す上面図である。
図9は、実施形態に係るスピンドルの一部を示す上面図である。
図10は、実施形態に係るスピンドルの一部を示す斜視図である。
図11は、実施形態に係るスピンドルを示す縦断面図である。
図12は、実施形態に係るスピンドルを示す断面図である。
図13は、実施形態に係るハンマを示す側面図である。
図14は、実施形態に係るハンマを示す縦断面図である。
図15は、実施形態に係るハンマを示す断面図である。
図16は、実施形態に係るスピンドルを示す斜視図である。
図17は、実施形態に係る打撃機構の動作を説明するための断面図である。
図18は、実施形態に係る打撃機構の動作を説明するための断面図である。
図19は、実施形態に係る打撃機構の動作を説明するための断面図である。
図20は、比較例に係るスピンドルの一部を示す上面図である。
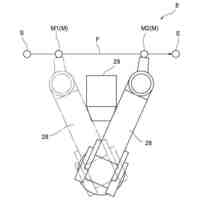
図21は、実施例及び比較例のそれぞれに係るスピンドルとボールとの関係を説明するための図である。
図22は、実施例及び比較例のそれぞれに係るボールがスピンドルから受ける力を説明するための図である。
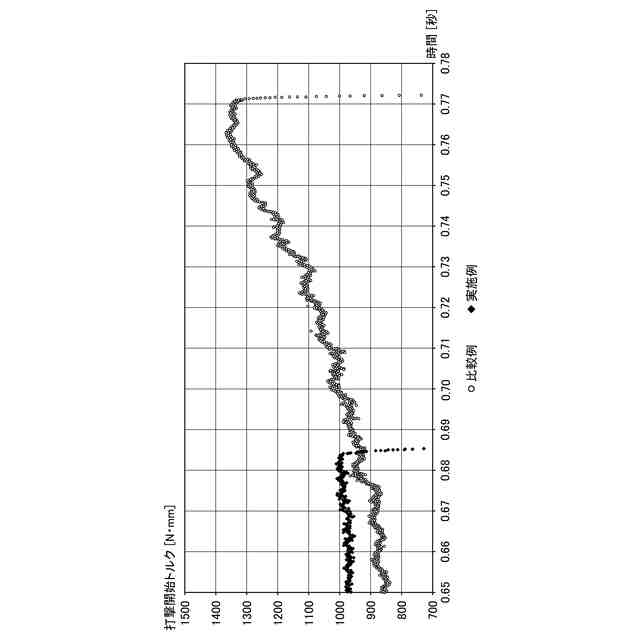
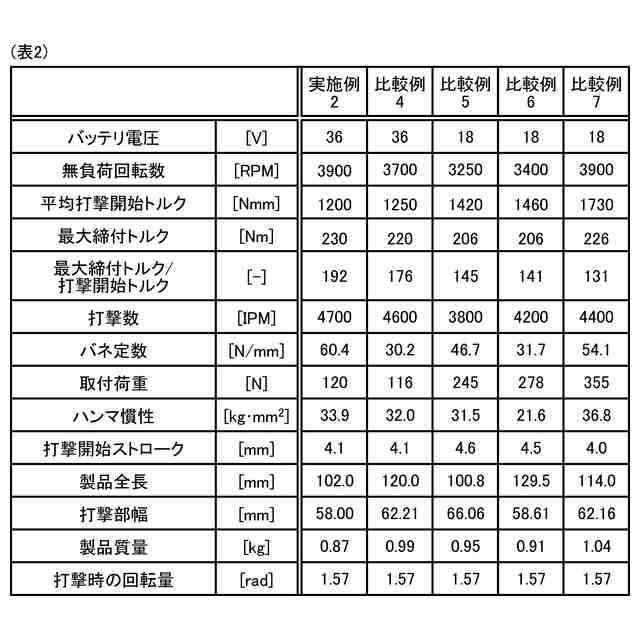
図23は、実施例及び比較例のそれぞれに係る打撃開始トルクを説明するための図である。
図24は、実施例及び比較例のそれぞれに係る締付速度と平均電流と平均電圧とを示す図である。
図25は、実施例及び比較例のそれぞれに係るボールからハンマに荷重が伝わる方向を示す図である。
図26は、実施形態に係るばね要素の構造を説明する模式図である。
図27は、ハンマのストロークに応じたトルク、回転量及びばね荷重の変化を説明するためのグラフである。
図28は、ばね要素を単一のコイルスプリングにした場合の、ハンマのストロークに応じたトルク、回転量及びばね荷重の変化を説明するためのグラフである。
【発明を実施するための形態】
【0009】
1つ又はそれ以上の実施形態において、インパクト工具は、18V以上の電圧が入力されるモータと、モータにより回転されるスピンドルと、スピンドルに形成されるスピンドル溝と、スピンドル溝に保持されるボールと、ボールを介してスピンドルに支持されるハンマと、ハンマを前方に付勢するスプリングと、ハンマにより回転方向に打撃されるアンビルと、を備える。ハンマがアンビルの打撃を開始するときにアンビルに作用するトルクを示す打撃開始トルクは、1100N・mm以下である。
【0010】
ねじ締め作業においてねじからアンビルに所定値以上の負荷トルクが作用すると、アンビル及びハンマの回転が停止する。スピンドルは、モータにより回転し続けているので、ハンマの回転が停止している状態でスピンドルが回転し続けると、ハンマは、スピンドルに対して後方に移動する。ハンマが後方に移動した後、スプリングの付勢力により、ハンマは回転しながら前方に移動する。ハンマが回転しながら前方に移動することにより、アンビルは、ハンマにより回転方向に打撃される。上記の構成では、打撃開始トルクが小さいので、ハンマによるアンビルの打撃開始のタイミングが早まる。すなわち、ねじ締め開始時からハンマによりアンビルが打撃される打撃時までの期間が短くなる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
電動作業機
3日前
株式会社マキタ
電動作業機
3日前
株式会社マキタ
電動ポンプ
11日前
株式会社マキタ
鉄筋結束機、鉄筋の結束方法および鉄筋結束機の使用方法
9日前
株式会社不二越
ロボット
28日前
株式会社ダイヘン
移動体
今日
トヨタ自動車株式会社
関節機構
2日前
東京都公立大学法人
対象物把持装置
11日前
学校法人五島育英会
アーム機構
2日前
株式会社イノウ
給油口キャップ用開閉具
29日前
住友重機械工業株式会社
ロボット
22日前
株式会社PILLAR
チューブ保持治具
7日前
庄内機械株式会社
釘打装置
15日前
川崎重工業株式会社
制動システム
28日前
株式会社アイエイアイ
グリッパー
17日前
オークラ輸送機株式会社
ハンド装置
10日前
株式会社リコー
多関節ロボット
1日前
株式会社マキタ
電動作業機
3日前
トヨタ自動車東日本株式会社
搬送治具
15日前
芝浦機械株式会社
双腕ロボット
21日前
株式会社マキタ
電動作業機
3日前
株式会社ダイヘン
ロボット制御システム
今日
トヨタ自動車株式会社
荷姿影響緩和方法
18日前
パナソニック株式会社
工具
29日前
パナソニック株式会社
工具
29日前
株式会社マキタ
電動工具
15日前
住友重機械工業株式会社
ロボット及びカバー
22日前
個人
回転移動式工具ホルダ
9日前
株式会社ダイヘン
端末装置
15日前
株式会社マキタ
打ち込み工具
15日前
株式会社マキタ
打ち込み工具
15日前
住友重機械工業株式会社
アクチュエータ支持部材
21日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
22日前
セイコーエプソン株式会社
多関節ロボット
今日
株式会社昭電
昇降装置及び昇降システム
2日前
株式会社不二越
軌道生成装置及び軌道生成プログラム
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ