TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025081949
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023195073
出願日
2023-11-16
発明の名称
昇降装置及び昇降システム
出願人
株式会社昭電
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
5/02 20060101AFI20250521BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】支線の有無によらず避雷針等の柱状の物体を昇降することが可能な昇降装置を提供する。
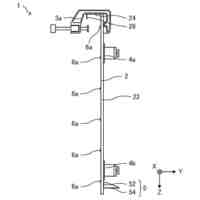
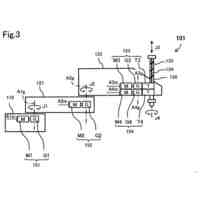
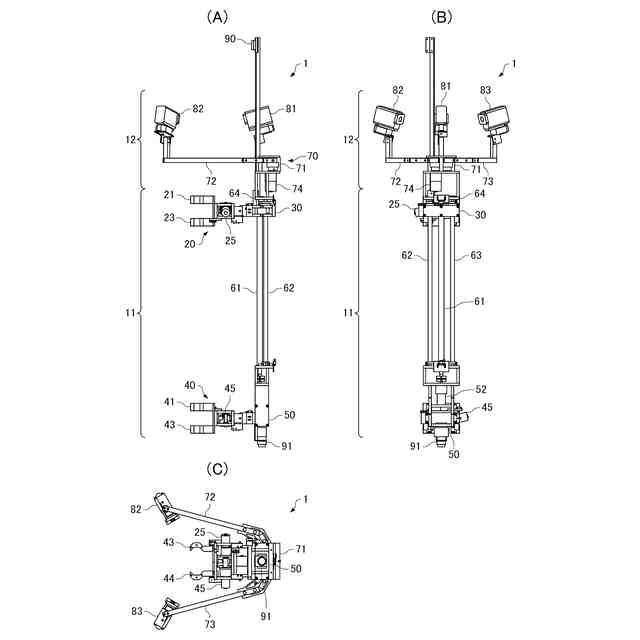
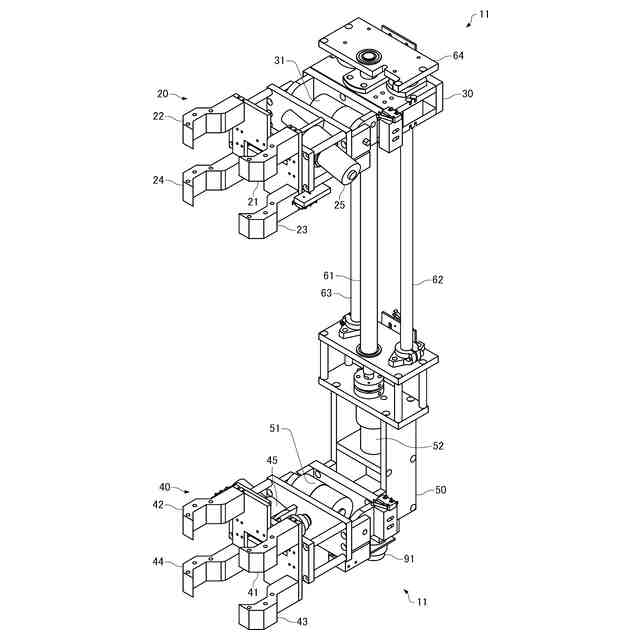
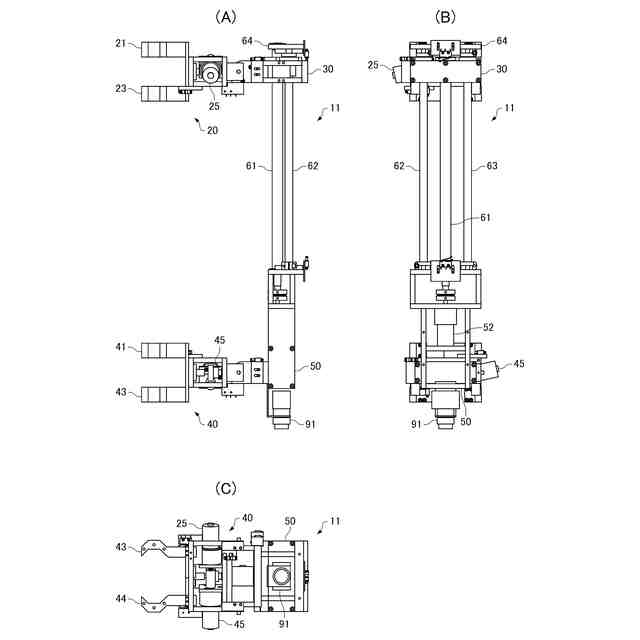
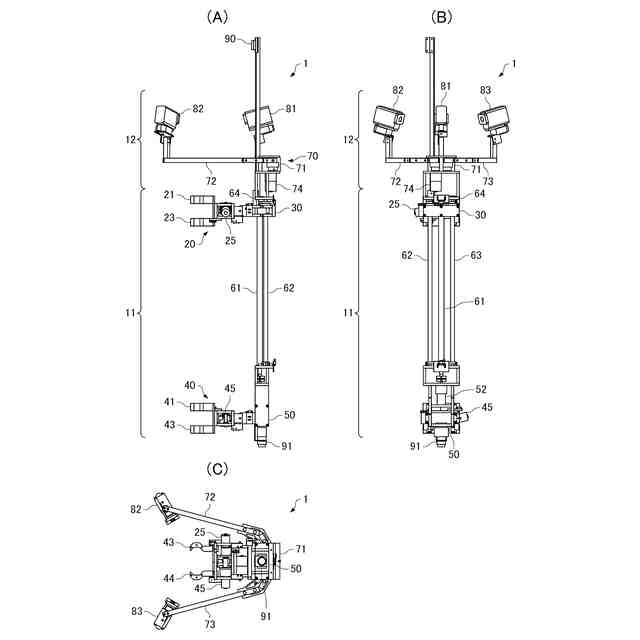
【解決手段】昇降装置1は、柱状の物体を昇降する装置であって、第1チャック20及び第2チャック40は、それぞれ、制御部100の制御により、避雷針6を把持又は解放し、避雷針6を解放した状態で、連結軸61の長手方向と直交する方向を回転軸として回転可能であり、第1チャック20が避雷針6を解放し、かつ、第2チャック40が避雷針6を把持しているとき、第1チャック20及び第1支持部30は、制御部100の制御により、連結軸61に沿って移動可能であり、第2チャック40が避雷針6を解放し、かつ、第1チャック20が避雷針6を把持しているとき、第2チャック40及び第2支持部50は、制御部100の制御により、連結軸61とともに連結軸61の長手方向に移動可能である。
【選択図】図7
特許請求の範囲
【請求項1】
柱状の物体を昇降する昇降装置であって、
前記物体を把持又は解放することが可能な第1チャックと、
前記第1チャックを支持する第1支持部と、
前記物体を把持又は解放することが可能な第2チャックと、
前記第2チャックを支持する第2支持部と、
前記第1支持部を挿通し、前記第1支持部と前記第2支持部とを連結する連結軸と、
制御部と、を備え、
前記第1チャック及び前記第2チャックは、それぞれ、前記制御部の制御により、前記物体を把持又は解放し、前記物体を解放した状態で、前記連結軸の長手方向と直交する方向を回転軸として回転可能であり、
前記第1チャックが前記物体を解放し、かつ、前記第2チャックが前記物体を把持しているとき、前記第1チャック及び前記第1支持部は、前記制御部の制御により、前記連結軸に沿って移動可能であり、
前記第2チャックが前記物体を解放し、かつ、前記第1チャックが前記物体を把持しているとき、前記第2チャック及び前記第2支持部は、前記制御部の制御により、前記連結軸とともに前記連結軸の前記長手方向に移動可能である、
ことを特徴とする昇降装置。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の昇降装置において、
前記連結軸を回転させるモーターを備え、
前記連結軸は、送りねじであり、
前記第1チャックが前記物体を解放し、かつ、前記第2チャックが前記物体を把持しているときに、前記連結軸が回転することにより、前記第1チャック及び前記第1支持部が前記連結軸に沿って移動し、
前記第2チャックが前記物体を解放し、かつ、前記第1チャックが前記物体を把持しているときに、前記連結軸が回転することにより、前記第2チャック及び前記第2支持部が前記連結軸とともに移動する、
ことを特徴とする昇降装置。
【請求項3】
請求項1に記載の昇降装置において、
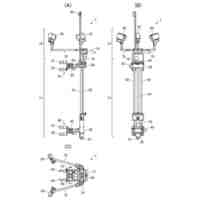
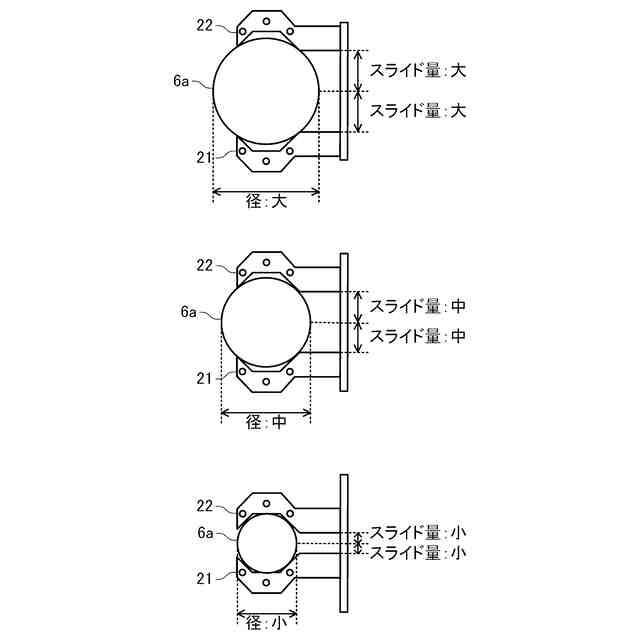
前記第1チャックは、第1爪部及び第2爪部を有し、前記第1爪部と前記第2爪部とが近づく方向にスライドして前記物体を把持し、前記第1爪部と前記第2爪部とが離れる方向にスライドして前記物体を解放し、前記第1爪部及び前記第2爪部のスライド量が可変であり、
前記第2チャックは、第3爪部及び第4爪部を有し、前記第3爪部と前記第4爪部とが近づく方向にスライドして前記物体を把持し、前記第3爪部と前記第4爪部とが離れる方向にスライドして前記物体を解放し、前記第3爪部及び前記第4爪部のスライド量が可変である、
ことを特徴とする昇降装置。
【請求項4】
請求項3に記載の昇降装置において、
前記第1チャックは、第5爪部及び第6爪部をさらに有し、前記第5爪部と前記第6爪部とが近づく方向にスライドして前記物体を把持し、前記第5爪部と前記第6爪部とが離れる方向にスライドして前記物体を解放し、前記第5爪部及び前記第6爪部のスライド量が可変であり、
前記第2チャックは、第7爪部及び第8爪部を有し、前記第7爪部と前記第8爪部とが近づく方向にスライドして前記物体を把持し、前記第7爪部と前記第8爪部とが離れる方向にスライドして前記物体を解放し、前記第7爪部及び前記第8爪部のスライド量が可変
である、
ことを特徴とする昇降装置。
【請求項5】
請求項1に記載の昇降装置において、
カメラが搭載される雲台を備え、
前記連結軸の一端は、前記第2支持部に固定され、
前記連結軸の他端は、前記雲台に固定されている、
ことを特徴とする昇降装置。
【請求項6】
請求項5に記載の昇降装置において、
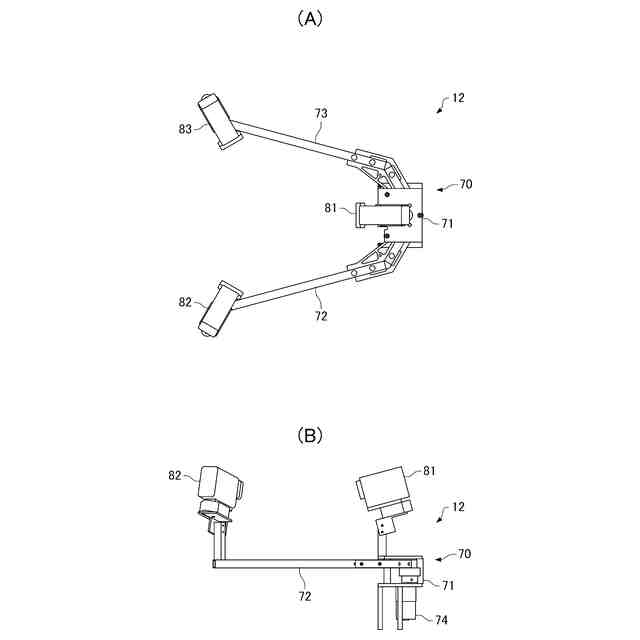
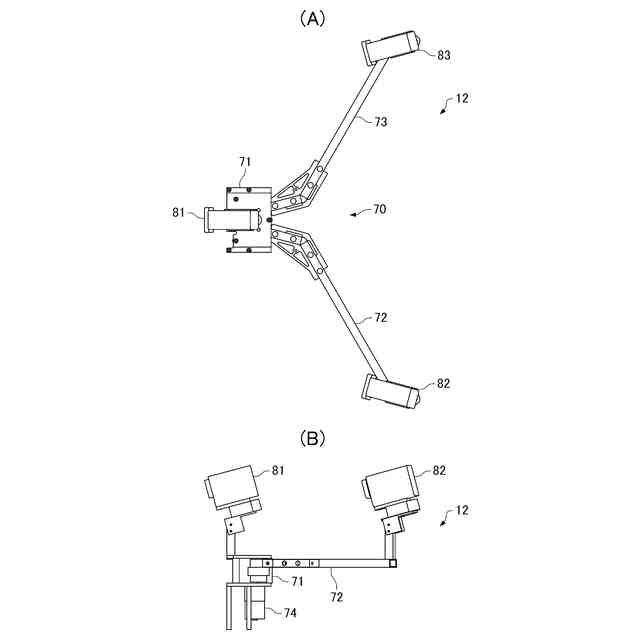
前記雲台は、
第1カメラが搭載される基部と、
第2カメラが搭載され、前記基部と接続される第1アームと、
第3カメラを搭載し、前記基部と接続される第2アームと、を備え、
前記第1アーム及び前記第2アームは、前記制御部の制御により、前記物体に近づく方向及び前記物体から離れる方向に移動可能である、
ことを特徴とする昇降装置。
【請求項7】
請求項1に記載の昇降装置において、
前記第1支持部には、前記物体の頂上を検出する頂上センサーが取り付けられており、
前記第1チャック及び前記第1支持部が前記連結軸に沿って移動中に、前記頂上センサーが前記物体の前記頂上を検出した場合、前記第1チャック及び前記第1支持部が停止する、
ことを特徴とする昇降装置。
【請求項8】
請求項1に記載の昇降装置において、
前記第2支持部には、前記昇降装置の昇降範囲の下死点を検出するリミットスイッチが取り付けられており、
前記第2チャック及び前記第2支持部が前記連結軸に沿って移動中に、前記リミットスイッチが前記下死点を検出した場合、前記第2チャック及び前記第2支持部が停止する、
ことを特徴とする昇降装置。
【請求項9】
請求項1に記載の昇降装置において、
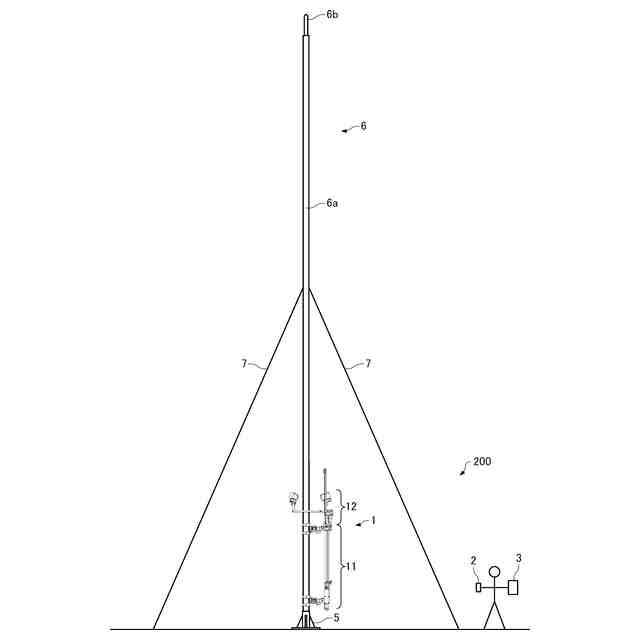
前記物体は、支線が取り付けられた避雷針である、
ことを特徴とする昇降装置。
【請求項10】
請求項1乃至9のいずれか一項に記載の昇降装置と、
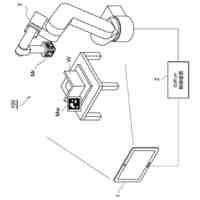
前記制御部に制御信号を送信するリモートコントローラーと、を備える、
ことを特徴とする昇降システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、避雷針等の柱状の物体を昇降する昇降装置及び昇降システムに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
雷撃を受ける避雷針は、雷保護システムの重要な部材であるが、避雷針の先端にあって受雷部である突針が雷撃によって破損すると、その後は雷保護システムが有効に機能しないおそれがある。そのため、避雷針は法定点検の対象になっているが、避雷針は径が小さく点検者が避雷針を登るには危険が伴うとともに大きな手間やコストがかかるため、現状では、屋根等の避雷針の固定箇所から目視により点検される場合が多い。
これに対して、本件出願人は、特許文献1に記載されているように、避雷針を昇って受雷部を撮影する点検装置を開発した。この点検装置により、点検者が避雷針の点検作業を容易かつ安全に実施することができ、雷撃に対して雷保護システムが確実に機能する状態が維持されることにより、情報化社会に安心と営業の継続がもたらされる。
【先行技術文献】
【特許文献】
【0003】
特許第6744463号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の点検装置は、支線が設けられた避雷針に対しては、支線を回避することができないため、避雷針の先端まで昇ることができない。
そこで、本発明が解決しようとする課題は、支線のような障害物の有無によらず避雷針等の柱状の物体を昇降することが可能な昇降装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明は前述の課題の少なくとも一部を解決するためになされたものであり、以下の態様又は適用例として実現することが可能である。
【0006】
[適用例1]
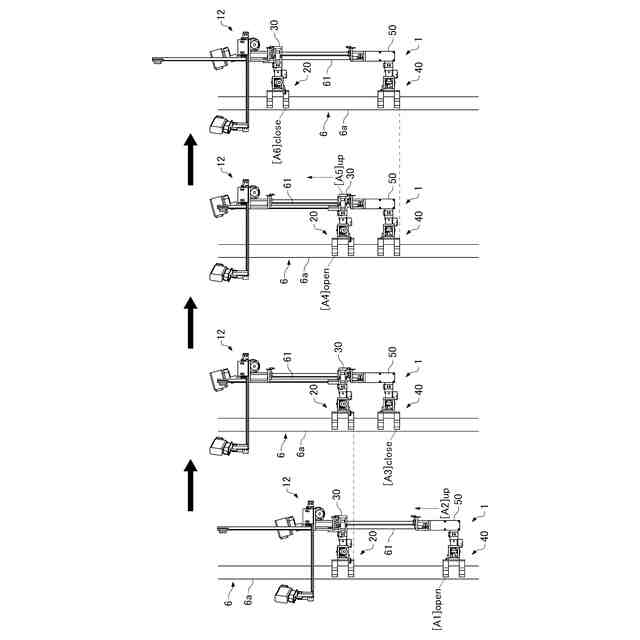
本適用例に係る昇降装置は、柱状の物体を昇降する昇降装置であって、前記物体を把持又は解放することが可能な第1チャックと、前記第1チャックを支持する第1支持部と、前記物体を把持又は解放することが可能な第2チャックと、前記第2チャックを支持する第2支持部と、前記第1支持部を挿通し、前記第1支持部と前記第2支持部とを連結する連結軸と、制御部と、を備え、前記第1チャック及び前記第2チャックは、それぞれ、前記制御部の制御により、前記物体を把持又は解放し、前記物体を解放した状態で、前記連結軸の長手方向と直交する方向を回転軸として回転可能であり、前記第1チャックが前記物体を解放し、かつ、前記第2チャックが前記物体を把持しているとき、前記第1チャック及び前記第1支持部は、前記制御部の制御により、前記連結軸に沿って移動可能であり、前記第2チャックが前記物体を解放し、かつ、前記第1チャックが前記物体を把持しているとき、前記第2チャック及び前記第2支持部は、前記制御部の制御により、前記連結軸とともに前記連結軸の前記長手方向に移動可能である、ことを特徴とする。
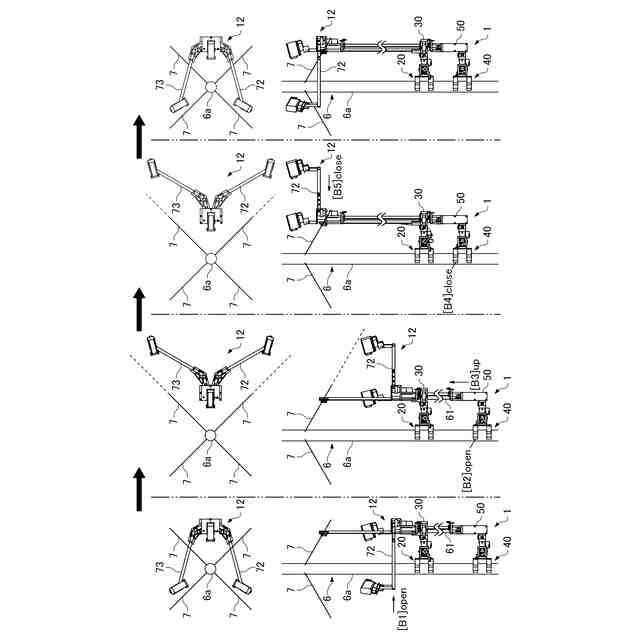
本適用例に係る昇降装置は、第2チャックが柱状の物体を把持した状態で第1チャック及び第1支持部が連結軸に沿って上昇し、第1チャックが物体を把持した状態で第2チャック及び第2支持部が連結軸とともに連結軸の長手方向に上昇する動作を繰り返すことにより、物体を把持しながら上昇することができる。また、本適用例に係る昇降装置は、第1チャックが柱状の物体を把持した状態で第2チャック及び第2支持部が連結軸とともに
連結軸の長手方向に下降し、第2チャックが物体を把持した状態で第1チャック及び第1支持部が連結軸に沿って下降する動作を繰り返すことにより、物体を把持しながら下降することができる。さらに、本適用例に係る昇降装置は、物体に支線が取り付けられている場合であっても、第1チャック及び第2チャックが、それぞれ、支線の手前で回転することにより、支線を回避しながら昇降することができる。このように、本適用例に係る昇降装置は、支線の有無によらず柱状の物体を昇降することができる。
【0007】
[適用例2]
上記適用例に係る昇降装置は、前記連結軸を回転させるモーターを備え、前記連結軸は、送りねじであり、前記第1チャックが前記物体を解放し、かつ、前記第2チャックが前記物体を把持しているときに、前記連結軸が回転することにより、前記第1チャック及び前記第1支持部が前記連結軸に沿って移動し、前記第2チャックが前記物体を解放し、かつ、前記第1チャックが前記物体を把持しているときに、前記連結軸が回転することにより、前記第2チャック及び前記第2支持部が前記連結軸とともに移動してもよい。
本適用例に係る昇降装置、連結軸に送りねじを用いることにより、大がかりな機構を必要とせずに効率よく物体を昇降することができる。
【0008】
[適用例3]
上記適用例に係る昇降装置において、前記第1チャックは、第1爪部及び第2爪部を有し、前記第1爪部と前記第2爪部とが近づく方向にスライドして前記物体を把持し、前記第1爪部と前記第2爪部とが離れる方向にスライドして前記物体を解放し、前記第1爪部及び前記第2爪部のスライド量が可変であり、前記第2チャックは、第3爪部及び第4爪部を有し、前記第3爪部と前記第4爪部とが近づく方向にスライドして前記物体を把持し、前記第3爪部と前記第4爪部とが離れる方向にスライドして前記物体を解放し、前記第3爪部及び前記第4爪部のスライド量が可変であってもよい。
本適用例に係る昇降装置は、柱状の物体の径に応じて第1爪部及び第2爪部のスライド量と第3爪部及び第4爪部のスライド量とを変更することにより、様々な径の物体を昇降することができる。
【0009】
[適用例4]
上記適用例に係る昇降装置において、前記第1チャックは、第5爪部及び第6爪部をさらに有し、前記第5爪部と前記第6爪部とが近づく方向にスライドして前記物体を把持し、前記第5爪部と前記第6爪部とが離れる方向にスライドして前記物体を解放し、前記第5爪部及び前記第6爪部のスライド量が可変であり、前記第2チャックは、第7爪部及び第8爪部を有し、前記第7爪部と前記第8爪部とが近づく方向にスライドして前記物体を把持し、前記第7爪部と前記第8爪部とが離れる方向にスライドして前記物体を解放し、前記第7爪部及び前記第8爪部のスライド量が可変であってもよい。
本適用例に係る昇降装置によれば、第1チャックが第1爪部及び第2爪部と第5爪部及び第6爪部とにより物体の異なる2か所を把持し、第2チャックが第3爪部及び第4爪部と第7爪部及び第8爪部とにより物体の異なる2か所を把持することにより、自重による昇降方向に対する傾きが小さくなる。したがって、本適用例に係る昇降装置は、物体を安定して昇降することができ、物体から脱落するおそれが低減される。
【0010】
[適用例5]
上記適用例に係る昇降装置は、カメラが搭載される雲台を備え、前記連結軸の一端は、前記第2支持部に固定され、前記連結軸の他端は、前記雲台に固定されていてもよい。
本適用例に係る昇降装置によれば、物体をカメラで撮影することができるので、ユーザーは、撮影された画像に基づいて物体の状態を検査することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社昭電
パラソル固定具
3か月前
株式会社昭電
昇降装置及び昇降システム
3日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
29日前
トヨタ自動車株式会社
関節機構
3日前
株式会社ダイヘン
移動体
1日前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
12日前
学校法人五島育英会
アーム機構
3日前
工機ホールディングス株式会社
作業機
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
株式会社PILLAR
チューブ保持治具
8日前
住友重機械工業株式会社
ロボット
23日前
川崎重工業株式会社
制動システム
29日前
株式会社アイエイアイ
グリッパー
18日前
庄内機械株式会社
釘打装置
16日前
株式会社不二越
垂直多関節ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
11日前
トヨタ自動車東日本株式会社
搬送治具
16日前
芝浦機械株式会社
双腕ロボット
22日前
株式会社マキタ
電動作業機
4日前
株式会社リコー
多関節ロボット
2日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
株式会社マキタ
電動作業機
4日前
トヨタ自動車株式会社
荷姿影響緩和方法
19日前
株式会社ダイヘン
ロボット制御システム
1日前
パナソニック株式会社
工具
1か月前
パナソニック株式会社
工具
1か月前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
アピュアン株式会社
エアー式衝撃工具
1か月前
株式会社マキタ
電動工具
16日前
個人
回転移動式工具ホルダ
10日前
住友重機械工業株式会社
ロボット及びカバー
23日前
株式会社ダイヘン
端末装置
16日前
セイコーエプソン株式会社
多関節ロボット
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ