TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025069505
公報種別
公開特許公報(A)
公開日
2025-05-01
出願番号
2023179254
出願日
2023-10-18
発明の名称
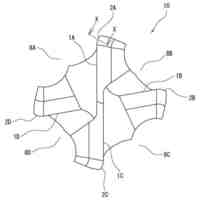
垂直多関節ロボット
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20250423BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】モータがカバーで覆われていても、フレーム干渉半径を大きくすることなく、簡素な構成でモータを冷却することができる垂直多関節ロボットを提供する。
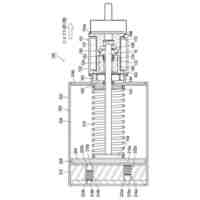
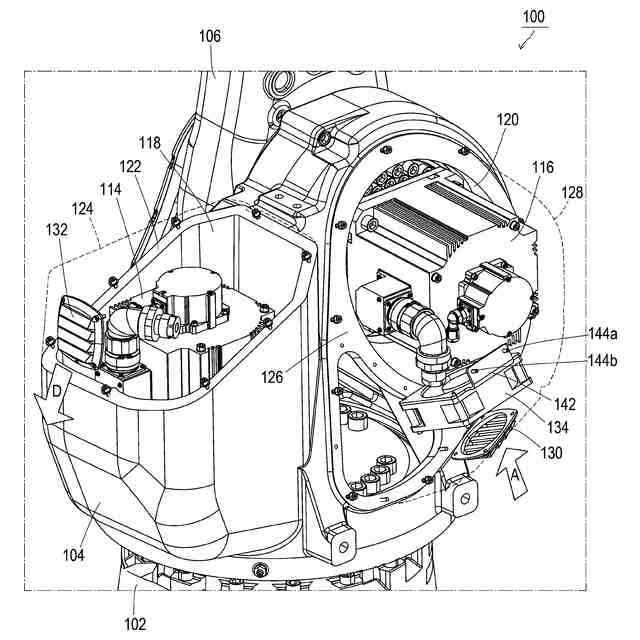
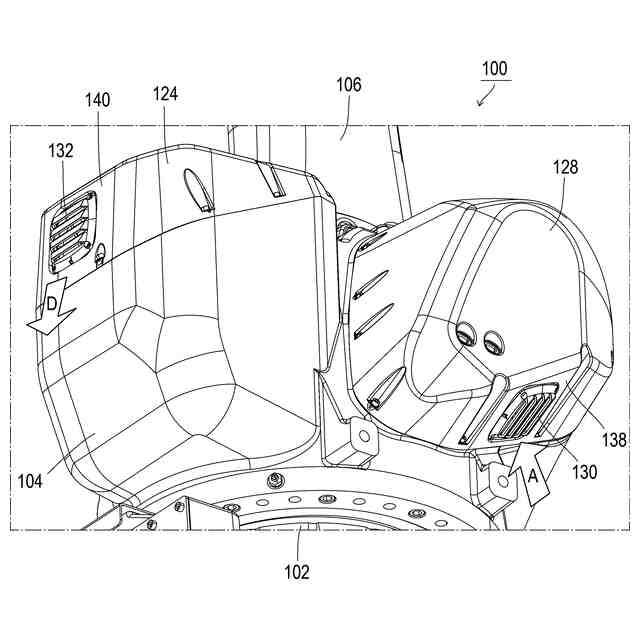
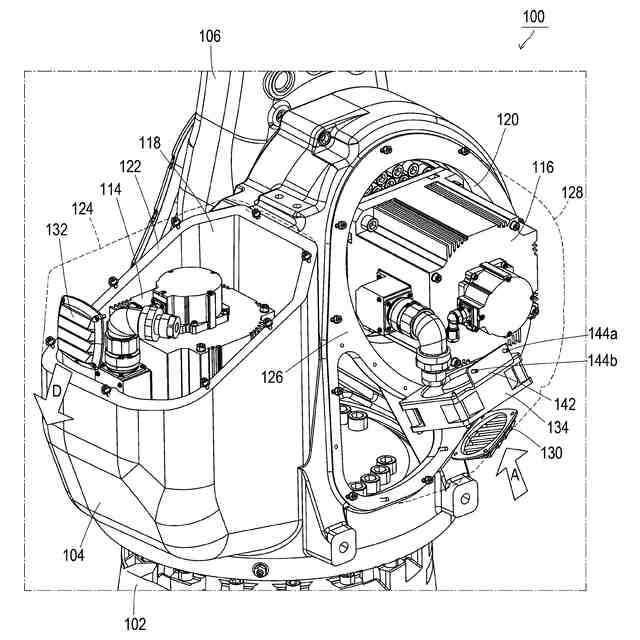
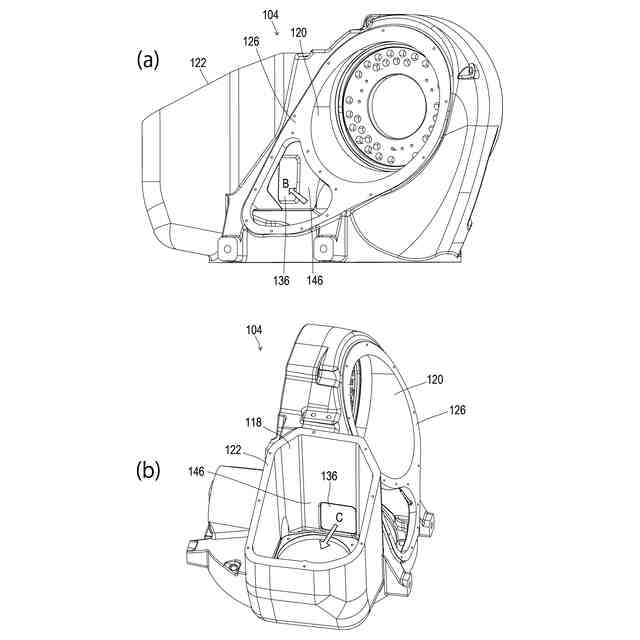
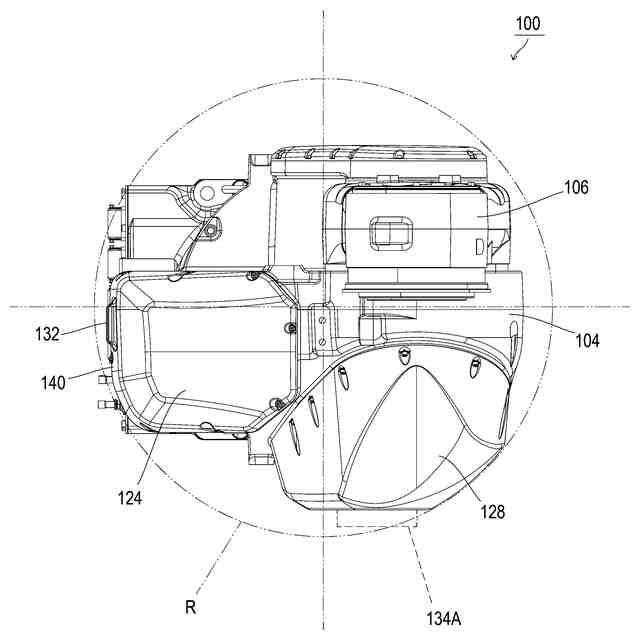
【解決手段】垂直多関節ロボット100は、基台102に対して胴部104を回動させる第1モータ114と、胴部に対して下アーム106を回動させる第2モータ116と、胴部の内部に形成され第1モータ、第2モータをそれぞれ収容する第1モータ室118、第2モータ室120と、胴部の内部に形成され第1モータ室と第2モータ室とを連通する連通口136と、第1モータ室の開口122、第2モータ室の開口126をそれぞれ覆う第1モータカバー124、第2モータカバー128と、第2モータカバーの下面138に形成された吸気口130と、第1モータカバーに形成された排気口132と、吸気口の近傍であって胴部の内部に配置された送気ファン134とを備える。
【選択図】図3
特許請求の範囲
【請求項1】
アームを有する垂直多関節ロボットであって、
基台と、
前記基台に載置された胴部と、
前記基台に対して前記胴部を回動させる第1モータと、
前記胴部に対して前記アームを回動させる第2モータと、
前記胴部の内部に形成され前記第1モータを収容する第1モータ室と、
前記胴部の内部に形成され前記第2モータを収容する第2モータ室と、
前記胴部の内部に形成され前記第1モータ室と前記第2モータ室とを連通する連通口と、
前記第1モータ室の開口を覆う第1モータカバーと、
前記第2モータ室の開口を覆う第2モータカバーと、
前記第1モータカバーまたは前記第2モータカバーの一方の下面に形成された吸気口と、
前記吸気口が前記第1モータカバーに形成されている場合、前記第2モータカバーに形成され、前記吸気口が前記第2モータカバーに形成されている場合、前記第1モータカバーに形成された排気口と、
前記吸気口または前記排気口の近傍であって前記胴部の内部に配置された送気ファンと、を備えることを特徴とする垂直多関節ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、アームを有する垂直多関節ロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
垂直多関節ロボットは、産業用ロボットであって、汎用の目的に用いられる。垂直多関節ロボットは、床などに設置される基台と、基台に載置された胴部とを備える。胴部の内部には、基台に対して胴部を回動させるモータ(第1モータ)や、胴部に対してアームを回動させるモータ(第2モータ)などが収容されている。
【0003】
垂直多関節ロボットは5軸や6軸の構成を取ることが多い。すると先端(エンドエフェクタ)寄りのモータよりも基台寄りのモータの方が動作させる質量が大きくなるため、必然的に出力の大きなモータを配置することになる。すると胴部に収容される第1モータや第2モータは出力が大きくなり、発熱も大きくなるため、モータの温度上昇を抑制する必要がある。
【0004】
特許文献1には、ロボットの関節部に用いられる冷却装置が記載されている。この冷却装置は、冷却媒体流路が形成されている冷却媒体流路体と、冷却媒体流路体に接続されている冷却媒体循環流路と、ラジエータおよび送出器(ポンプ)と、ファンとを備える。冷却媒体流路体は、ロボットの関節部の発熱部となるモータに配設されている(液冷)。ラジエータおよび送出器は、冷却媒体循環流路の途中に設けられている。ファンは、ラジエータに設けられていて、ラジエータを冷却するように構成されている。
【先行技術文献】
【特許文献】
【0005】
特開2022-056064号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の冷却装置は、ロボットの関節部のモータに冷却媒体流路体を配設する必要があり、構造が複雑となるという問題がある。
【0007】
別の構成として、冷却ファンを取り付けてモータを冷却(空冷)する構成が考えられる。しかしロボットがフルカバーモデル(機構部がカバーで覆われる構造)である場合には、モータもカバーで覆われている。そのカバーの外側に冷却ファンを取り付けたり、冷却ファンを覆うようにカバーを大きくしたりすると、ロボットが動作したときのフレーム干渉半径が大きくなるという問題がある。
【0008】
本発明は、このような課題に鑑み、モータがカバーで覆われていても、フレーム干渉半径を大きくすることなく、簡素な構成でモータを冷却することができる垂直多関節ロボットを提供することを目的としている。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明にかかる垂直多関節ロボットの代表的な構成は、アームを有する垂直多関節ロボットであって、基台と、基台に載置された胴部と、基台に対して胴部を回動させる第1モータと、胴部に対してアームを回動させる第2モータと、胴部の内部に形成され第1モータを収容する第1モータ室と、胴部の内部に形成され第2モータを収容する第2モータ室と、胴部の内部に形成され第1モータ室と第2モータ室とを連通する連通口と、第1モータ室の開口を覆う第1モータカバーと、第2モータ室の開口を覆う第2モータカバーと、第1モータカバーまたは第2モータカバーの一方の下面に形成された吸気口と、吸気口が第1モータカバーに形成されている場合、第2モータカバーに形成され、吸気口が第2モータカバーに形成されている場合、第1モータカバーに形成された排気口と、吸気口または排気口の近傍であって胴部の内部に配置された送気ファンと、を備えることを特徴とする。
【発明の効果】
【0010】
本発明によれば、モータがカバーで覆われていても、フレーム干渉半径を大きくすることなく、簡素な構成でモータを冷却することができる垂直多関節ロボットを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
蓄圧装置
3日前
株式会社不二越
NC転造盤
25日前
株式会社不二越
ソレノイド
1か月前
株式会社不二越
摩耗判定装置
1か月前
株式会社不二越
ベーンポンプ
7日前
株式会社不二越
波形抽出装置
1か月前
株式会社不二越
保持器付き軸受
5日前
株式会社不二越
協働ロボットシステム
3日前
株式会社不二越
真空熱処理装置の排気構造
1か月前
株式会社不二越
組立式スカイビングカッタ
2か月前
株式会社不二越
製品選定装置及びプログラム
3日前
株式会社不二越
複合加工機およびツーリング
1か月前
株式会社不二越
情報処理装置及びプログラム
28日前
株式会社不二越
不等リードラジアスエンドミル
1か月前
株式会社不二越
合金鋼およびそれを用いた機械部品
28日前
株式会社不二越
鉄酸化物膜、合金鋼および鉄酸化物膜形成方法
1か月前
株式会社不二越
皮膜付き軸受およびこれに用いられるしゅう動皮膜剤
1か月前
株式会社不二越
鉄酸化物膜、鉄酸化物膜被覆部材、鉄酸化物膜被覆部材用合金鋼および鉄酸化物膜被覆部材の製造方法
1か月前
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
28日前
トヨタ自動車株式会社
関節機構
2か月前
株式会社ダイヘン
移動体
2か月前
住友重機械工業株式会社
教示装置
25日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
26日前
学校法人五島育英会
アーム機構
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
25日前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
2か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
25日前
住友重機械工業株式会社
支援装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ