TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025069911
公報種別
公開特許公報(A)
公開日
2025-05-01
出願番号
2024064940
出願日
2024-04-12
発明の名称
工具
出願人
パナソニック株式会社
代理人
弁理士法人北斗特許事務所
主分類
B25F
5/00 20060101AFI20250423BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】本開示は、工具の動作時における音の抑制を図ることを目的とする。
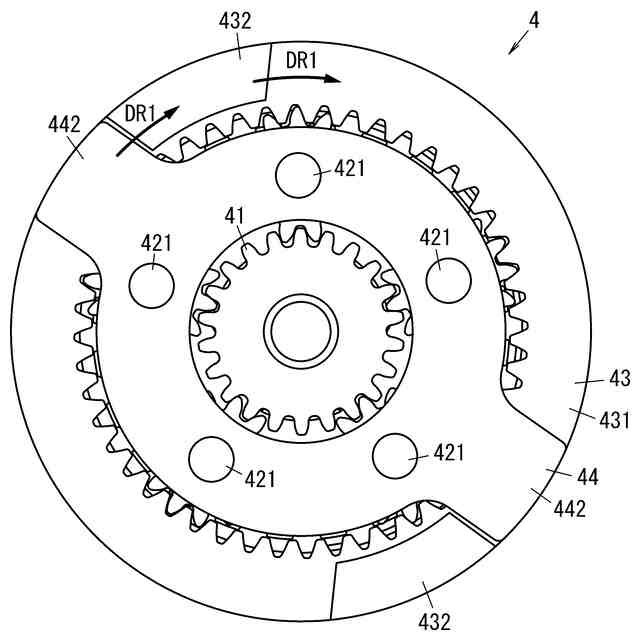
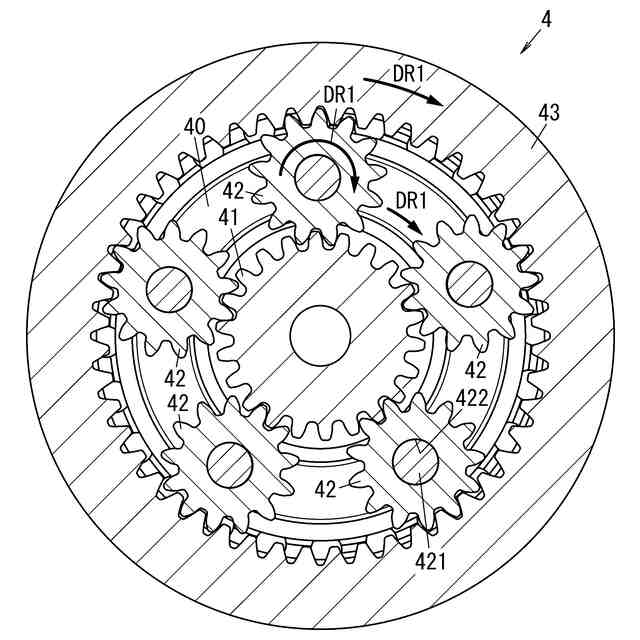
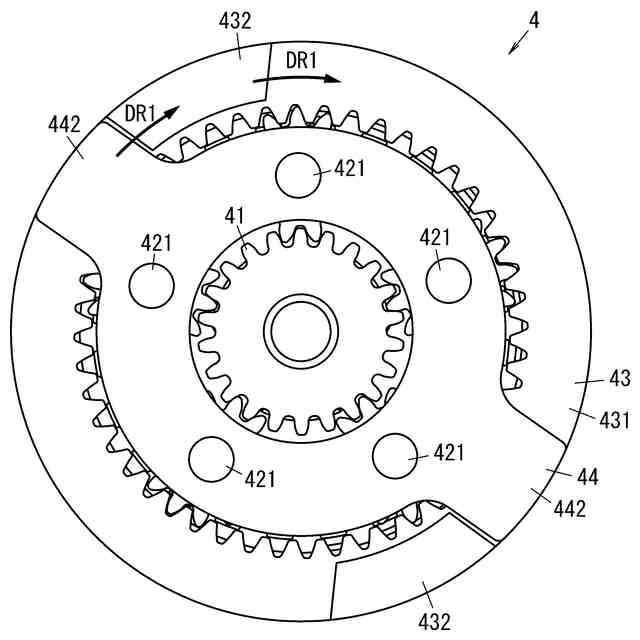
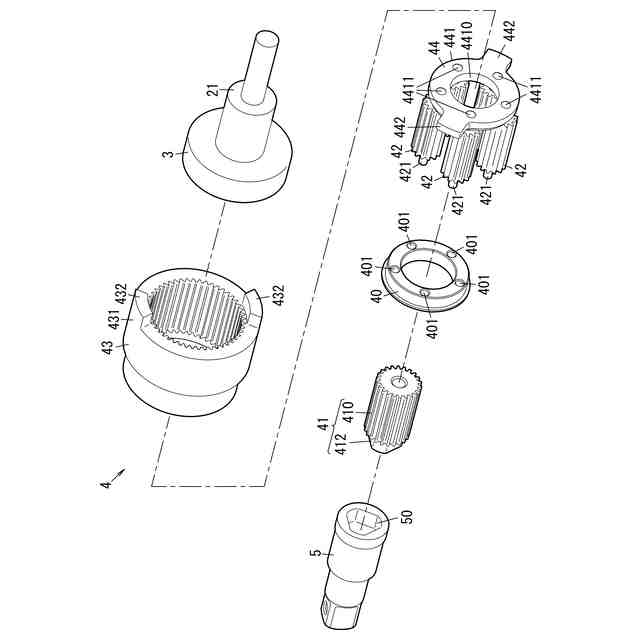
【解決手段】工具は、モータと、太陽歯車41と、出力軸と、複数の遊星歯車と、遊星キャリア44と、内歯車43と、を備える。出力軸には、先端工具が取り付けられ、太陽歯車41の回転が伝達される。内歯車43は、回転可能な状態で保持される。遊星キャリア44は、伝達体に固定され、伝達体の回転に応じて回転する。内歯車43は、第1係合部432を有する。遊星キャリア44は、第2係合部442を有する。内歯車43の第1係合部432と、遊星キャリア44の第2係合部442とは、伝達体の回転方向に沿って相対移動可能であり、内歯車43の回転に応じて接触する。
【選択図】図4
特許請求の範囲
【請求項1】
トルクを他の部材に伝達する伝達体を回転させるモータと、
太陽歯車と、
先端工具が取り付けられ、前記太陽歯車の回転が伝達される出力軸と、
前記太陽歯車の周囲に配置され、前記太陽歯車と噛み合う複数の遊星歯車と、
前記複数の遊星歯車を自転可能に支持し、前記太陽歯車を中心として回転する遊星キャリアと、
前記複数の遊星歯車を囲うように配置され、前記複数の遊星歯車と噛み合い、回転可能な状態で保持される内歯車と、を備え、
前記遊星キャリアは、前記伝達体に固定され、前記伝達体の回転に応じて回転し、
前記内歯車は、第1係合部を有し、
前記遊星キャリアは、第2係合部を有し、
前記内歯車の前記第1係合部と、前記遊星キャリアの前記第2係合部とは、前記伝達体の回転方向に沿って相対移動可能であり、前記内歯車の回転に応じて接触する、
工具。
続きを表示(約 2,000 文字)
【請求項2】
前記内歯車は、前記先端工具が作業対象に接触しているとき、かつ、前記内歯車の前記第1係合部と前記遊星キャリアの前記第2係合部とが接触していないときに、前記伝達体と同方向に回転し、
前記内歯車と、前記出力軸とは、前記先端工具が作業対象に接触しているとき、かつ、前記内歯車の前記第1係合部と前記遊星キャリアの前記第2係合部とが接触しているときに、前記伝達体と一体的に回転する、
請求項1に記載の工具。
【請求項3】
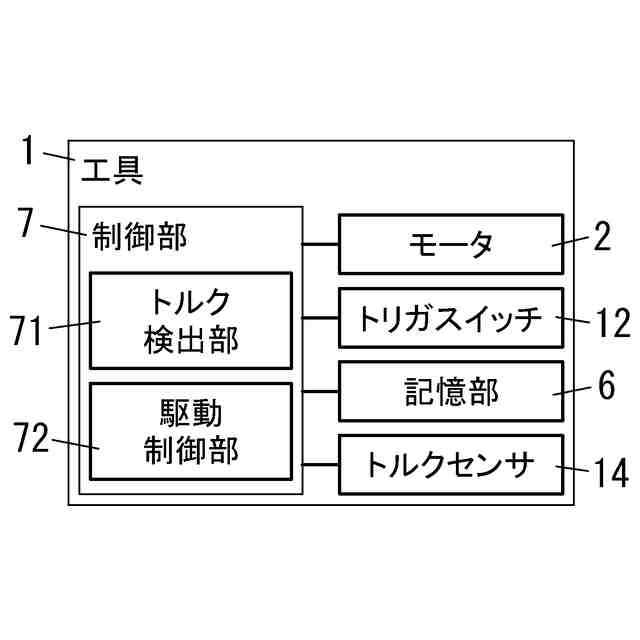
前記モータを制御する制御部を更に備え、
前記制御部は、
前記モータを制御して前記伝達体を第1方向に回転させ、
前記内歯車と前記出力軸との一体的な回転が止まった後に、前記モータを制御して前記伝達体を前記第1方向とは逆方向の第2方向に所定時間又は所定角度回転させ、
前記伝達体を前記第2方向に前記所定時間又は前記所定角度回転させた後に、前記モータを制御して前記伝達体を前記第1方向に回転させる、
請求項1に記載の工具。
【請求項4】
前記内歯車は、円環状又は円筒状に形成され内周面に複数の歯が設けられた本体部を更に有し、
前記遊星キャリアは、前記複数の遊星歯車の各々の軸と連結されたキャリア部を更に有し、
前記内歯車の前記第1係合部は、前記出力軸の回転軸に沿って、前記本体部から突出しており、
前記遊星キャリアの前記第2係合部は、前記回転軸と直交する方向に沿って、前記キャリア部から突出している、
請求項1に記載の工具。
【請求項5】
前記内歯車は、
円環状又は円筒状に形成され内周面に複数の歯が設けられた本体部と、
第3係合部と、を更に有し、
前記内歯車の前記第1係合部及び前記第3係合部は、前記本体部から突出しており、
前記遊星キャリアは、
前記複数の遊星歯車の各々の軸の第1端と連結された第1キャリア部と、
前記複数の遊星歯車の各々の前記軸の第2端と連結された第2キャリア部と、
第4係合部と、を更に有し、
前記複数の遊星歯車は、前記第1キャリア部と前記第2キャリア部との間に配置され、
前記遊星キャリアの前記第2係合部は、前記第1キャリア部から突出しており、
前記遊星キャリアの前記第4係合部は、前記第2キャリア部から突出しており、
前記内歯車の前記第3係合部と、前記遊星キャリアの前記第4係合部とは、前記伝達体の回転方向に沿って相対移動可能であり、
前記内歯車の前記第1係合部と、前記遊星キャリアの前記第2係合部とが、前記内歯車の回転に応じて接触するとき、前記内歯車の前記第3係合部と、前記遊星キャリアの前記第4係合部とが接触する、
請求項1に記載の工具。
【請求項6】
前記内歯車の前記第1係合部及び前記第3係合部は、前記出力軸の回転軸に沿って、前記本体部から突出しており、
前記遊星キャリアの前記第2係合部は、前記回転軸と直交する方向に沿って、前記第1キャリア部から突出しており、
前記遊星キャリアの前記第4係合部は、前記回転軸と直交する所定方向に沿って、前記第2キャリア部から突出している、
請求項5に記載の工具。
【請求項7】
前記内歯車は、
前記第1係合部を含む複数の第1係合部と、
前記第3係合部を含む複数の第3係合部と、を有し、
前記遊星キャリアは、
前記第2係合部を含む複数の第2係合部と、
前記第4係合部を含む複数の第4係合部と、を有する、
請求項5に記載の工具。
【請求項8】
前記太陽歯車としての第1太陽歯車とは別の第2太陽歯車と、
前記複数の遊星歯車としての複数の第1遊星歯車とは別の複数の第2遊星歯車と、
前記遊星キャリアとしての第1遊星キャリアとは別の第2遊星キャリアと、を更に備え、
前記第2遊星キャリアは、
前記第1太陽歯車に固定され、前記第1太陽歯車の回転に応じて前記第1太陽歯車を中心として回転し、
前記複数の第2遊星歯車を自転可能に支持し、
前記複数の第2遊星歯車は、前記第2太陽歯車の周囲に配置され、前記第2太陽歯車と噛み合い、
前記内歯車は、前記複数の第1遊星歯車及び前記複数の第2遊星歯車を囲うように配置され、前記複数の第1遊星歯車及び前記複数の第2遊星歯車と噛み合う、
請求項1に記載の工具。
【請求項9】
前記モータと前記複数の遊星歯車との間に配置され、前記伝達体と一体的に回転する慣性体を更に備える、
請求項1に記載の工具。
発明の詳細な説明
【技術分野】
【0001】
本開示は一般に工具に関し、より詳細には、モータを備える工具に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、インパクト機構を備えるインパクト回転工具が開示されている。特許文献1のインパクト回転工具では、インパクト機構が出力軸に打撃衝撃を加える。
【先行技術文献】
【特許文献】
【0003】
特開2017-132021号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載されているようなインパクト回転工具では、インパクト機構が出力軸に打撃衝撃を加える際に、音が発生する。
【0005】
本開示は上記事由に鑑みてなされており、動作時における音の抑制を図ることができる工具を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係る工具は、モータと、太陽歯車と、出力軸と、複数の遊星歯車と、遊星キャリアと、内歯車と、を備える。前記モータは、トルクを他の部材に伝達する伝達体を回転させる。前記出力軸には、先端工具が取り付けられ、前記太陽歯車の回転が伝達される。前記複数の遊星歯車は、前記太陽歯車の周囲に配置され、前記太陽歯車と噛み合う。前記遊星キャリアは、前記複数の遊星歯車を自転可能に支持し、前記太陽歯車を中心として回転する。前記内歯車は、前記複数の遊星歯車を囲うように配置され、前記複数の遊星歯車と噛み合い、回転可能な状態で保持される。前記遊星キャリアは、前記伝達体に固定され、前記伝達体の回転に応じて回転する。前記内歯車は、第1係合部を有する。前記遊星キャリアは、第2係合部を有する。前記内歯車の前記第1係合部と、前記遊星キャリアの前記第2係合部とは、前記伝達体の回転方向に沿って相対移動可能であり、前記内歯車の回転に応じて接触する。
【発明の効果】
【0007】
本開示には、工具の動作時における音の抑制を図ることができるという利点がある。
【図面の簡単な説明】
【0008】
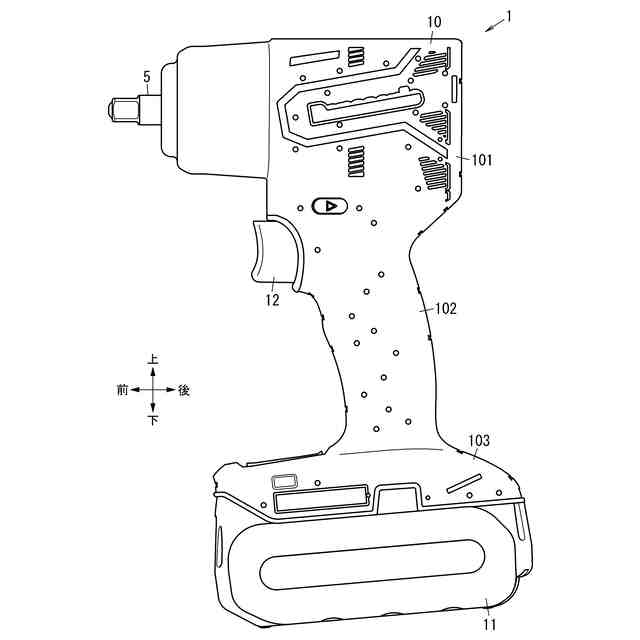
図1は、実施形態1に係る工具の側面図である。
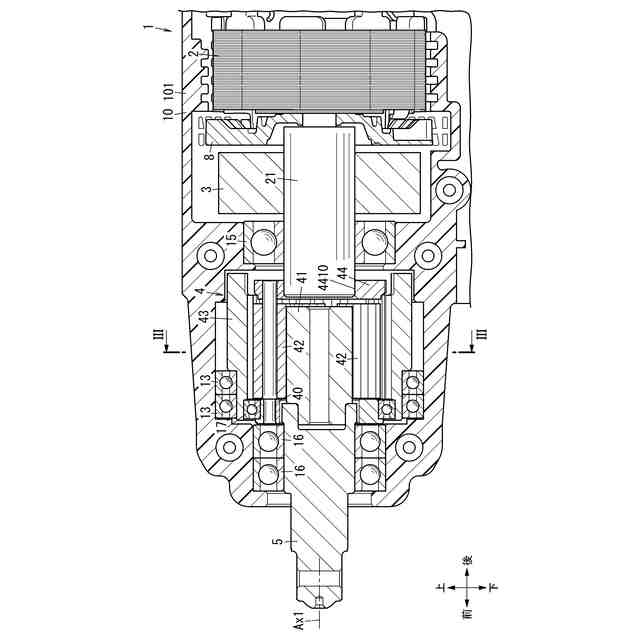
図2は、同上の工具の要部の側断面図である。
図3は、図2のIII-III線に対応する断面図である。
図4は、同上の工具の遊星歯車機構の背面図である。
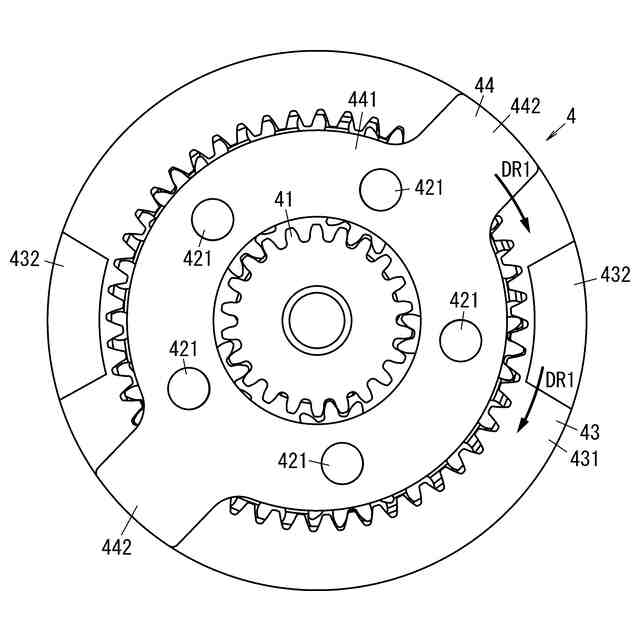
図5は、同上の工具の遊星歯車機構の背面図であって、図4よりも後の時点を表す。
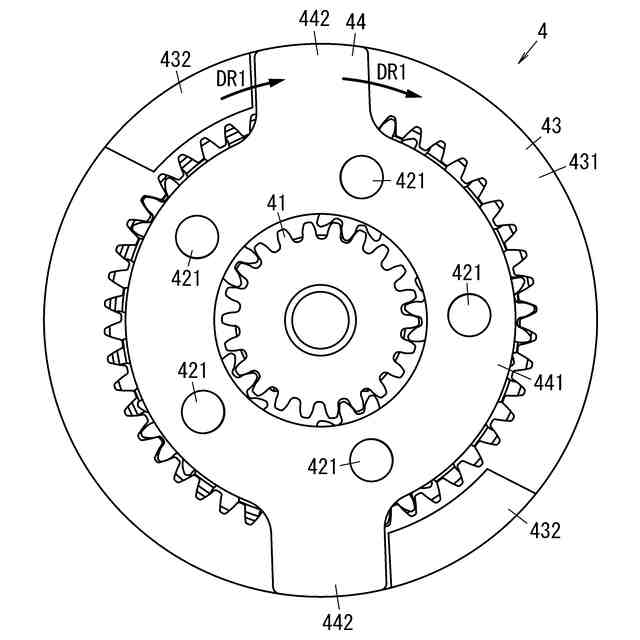
図6は、同上の工具の遊星歯車機構の背面図であって、図5よりも後の時点を表す。
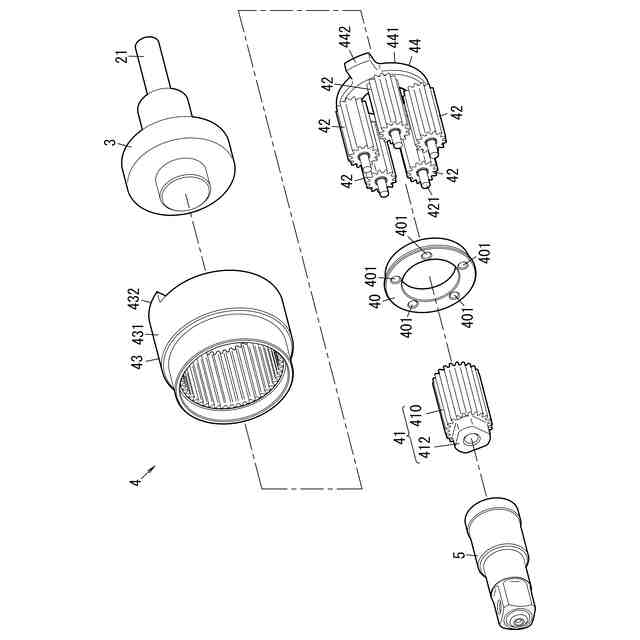
図7は、同上の工具の分解斜視図である。
図8は、同上の工具の分解斜視図である。
図9は、同上の工具の構成を示すブロック図である。
図10は、同上の工具の動作を示すタイミングチャートである。
図11は、実施形態2に係る工具の要部の側断面図である。
図12は、図11のXII-XII線に対応する断面図である。
図13は、図11のXIII-XIII線に対応する断面図である。
図14は、同上の工具の分解斜視図である。
図15は、実施形態3に係る工具の要部の側断面図である。
図16は、同上の工具の分解斜視図である。
【発明を実施するための形態】
【0009】
以下、本開示に関する好ましい実施形態について図を参照しつつ詳細に説明する。なお、以下に説明する各実施形態において互いに共通する要素には同一符号を付しており、共通する要素についての重複する説明は省略する場合がある。以下の各実施形態は、本開示の様々な実施形態の一つに過ぎない。各実施形態は、本開示の目的を達成できれば、設計等に応じて種々の変更が可能である。また、各実施形態(各変形例を含む)は、適宜組み合わせて実現されてもよい。
【0010】
本開示において説明する各図は、模式的な図であり、各図中の各構成要素の大きさ及び厚さのそれぞれの比が、必ずしも実際の寸法比を反映しているとは限らない。なお、図中の各方向を示す矢印は一例であり、工具の使用時の方向を規定する趣旨ではない。また、図中の各方向を示す矢印は説明のために表記しているに過ぎず、実体を伴わない。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
電動ドライバ
12日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社ダイヘン
移動体
15日前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
関節機構
17日前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
26日前
株式会社スター精機
吸着パッド
11日前
学校法人五島育英会
アーム機構
17日前
株式会社スター精機
吸着パッド
11日前
工機ホールディングス株式会社
作業機
3日前
工機ホールディングス株式会社
作業機
3日前
工機ホールディングス株式会社
作業機
3日前
庄内機械株式会社
釘打装置
1か月前
住友重機械工業株式会社
ロボット
1か月前
株式会社PILLAR
チューブ保持治具
22日前
川崎重工業株式会社
制動システム
1か月前
株式会社アイエイアイ
グリッパー
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
株式会社不二越
垂直多関節ロボット
1か月前
株式会社スター精機
産業用ロボット
9日前
オークラ輸送機株式会社
ハンド装置
25日前
株式会社マキタ
電動作業機
18日前
株式会社マキタ
電動作業機
18日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
トヨタ自動車東日本株式会社
搬送治具
1か月前
芝浦機械株式会社
双腕ロボット
1か月前
株式会社リコー
多関節ロボット
16日前
株式会社安川電機
ロボット
9日前
株式会社ダイヘン
ロボット制御システム
15日前
株式会社安川電機
ロボット
9日前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社安川電機
ロボット
9日前
株式会社ジャノメ
ロボット
5日前
パナソニック株式会社
工具
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































