TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025082913
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2023196473
出願日
2023-11-20
発明の名称
多関節ロボット
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20250523BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】多関節ロボットの手先の位置精度を高めることのできる技術を提供する。
【解決手段】本開示の多関節ロボットは、基台と、基台に接続され、基台に対して回転駆動する第1アームと、第1アームを基台に対して回転させる第1駆動装置と、を備える。第1駆動装置は、第1モーターと、第1減速機とを有し、第1モーターの回転軸と第1減速機の出力軸とが交差している。
【選択図】図3
特許請求の範囲
【請求項1】
多関節ロボットであって、
基台と、
前記基台に接続され、前記基台に対して回転駆動する第1アームと、
前記第1アームを前記基台に対して回転させる第1駆動装置と、
を備え、
前記第1駆動装置は、第1モーターと、第1減速機とを有し、
前記第1モーターの回転軸と前記第1減速機の出力軸とが交差している、多関節ロボット。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の多関節ロボットであって、
前記第1減速機は、ローラーギヤカム減速機である、多関節ロボット。
【請求項3】
請求項1に記載の多関節ロボットであって、更に、
前記第1アームに接続された第2アームと、
前記第2アームを前記第1アームに対して回転させる第2駆動装置と、
を備え、
前記第2駆動装置は、第2モーターと、第2減速機とを有し、
前記第2モーターの回転軸と前記第2減速機の出力軸とが交差している、多関節ロボット。
【請求項4】
請求項3に記載の多関節ロボットであって、
前記第2駆動装置は、前記第1アームに設けられている、多関節ロボット。
【請求項5】
請求項3に記載の多関節ロボットであって、更に、
前記第2アームの先端部分に設けられたシャフトと、
前記シャフトを上下運動させる第3駆動装置と、
備え、
前記第3駆動装置は、第3モーターと、第3減速機とを有し、
前記第3モーターの回転軸と前記第3減速機の出力軸とが交差している、多関節ロボット。
【請求項6】
請求項5に記載の多関節ロボットであって、
前記第2減速機と前記第3減速機のそれぞれは、ローラーギヤカム減速機であり、
前記第2減速機と前記第3減速機は、前記第2アームに設けられている、多関節ロボット。
【請求項7】
請求項3に記載の多関節ロボットであって、
前記第1駆動装置は、前記基台に設けられており、
前記第2駆動装置は、前記第2アームに設けられており、
前記第1減速機と前記第2減速機のそれぞれは、中空部を有するタレットと、前記タレットの外周に係合するローラーギヤカムと、を有するローラーギヤカム減速機であり、
前記第2アーム内に設けられた電気配線が、
(i)前記第2減速機の前記タレットの前記中空部を通過して前記第2アームから前記第1アームに進入し、
(ii)前記第1アームの内部を通過して前記基台の上方に至り、
(iii)前記第1減速機の前記タレットの前記中空部を通過して前記基台の内部に至る、
ように配置されている、多関節ロボット。
【請求項8】
請求項1に記載の多関節ロボットであって、更に、
前記第1アームに接続された第2アームと、
前記第2アームを前記第1アームに対して回転させる第2駆動装置と、
を備え、
前記第2駆動装置は、第2モーターと、第2減速機とを有し、
前記第2モーターの回転軸と前記第2減速機の出力軸とが平行である、多関節ロボット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、多関節ロボットに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、作業ロボットによる塗装方法が開示されている。この方法では、作業ロボットのハンド部にプリントヘッドを装着し、印刷対象とプリントヘッドとの距離を一定に維持した状態でプリントヘッドを動かしながら印刷を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2022-083166号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、塗装品質の向上のために作業ロボットのハンド部の位置精度が重要となる。塗装に限らず、多関節ロボットを用いて作業を行う場合は、位置精度が重要となる。そこで、多関節ロボットの手先の位置精度を高める技術が望まれる。
【課題を解決するための手段】
【0005】
本開示の一形態によれば、多関節ロボットが提供される。この多関節ロボットは、基台と、前記基台に接続され、前記基台に対して回転駆動する第1アームと、前記第1アームを前記基台に対して回転させる第1駆動装置と、を備える。前記第1駆動装置は、第1モーターと、第1減速機とを有し、前記第1モーターの回転軸と前記第1減速機の出力軸とが交差している。
【図面の簡単な説明】
【0006】
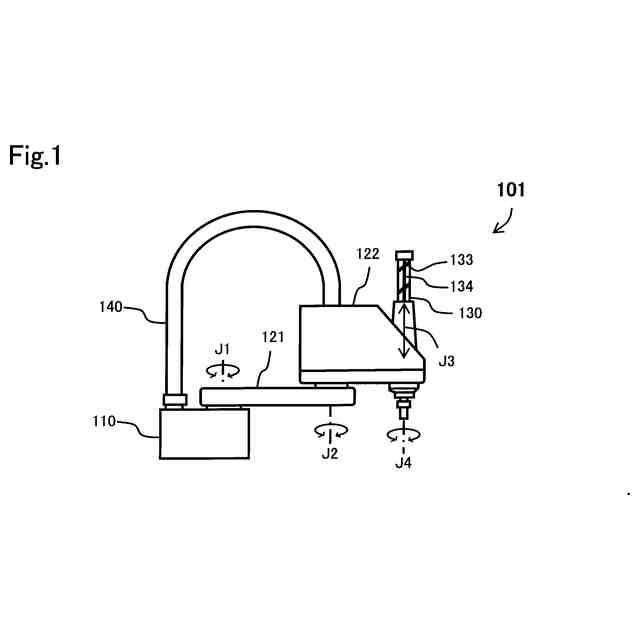
第1実施形態におけるスカラロボットの構成を示す説明図。
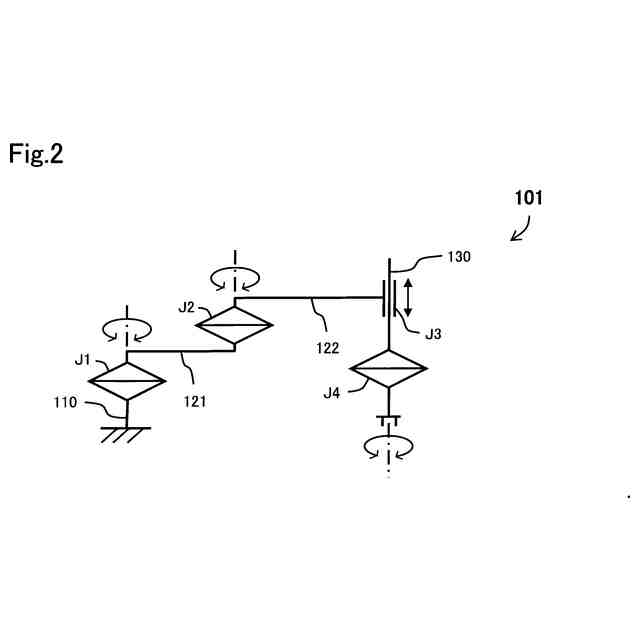
第1実施形態におけるスカラロボットの機構図。
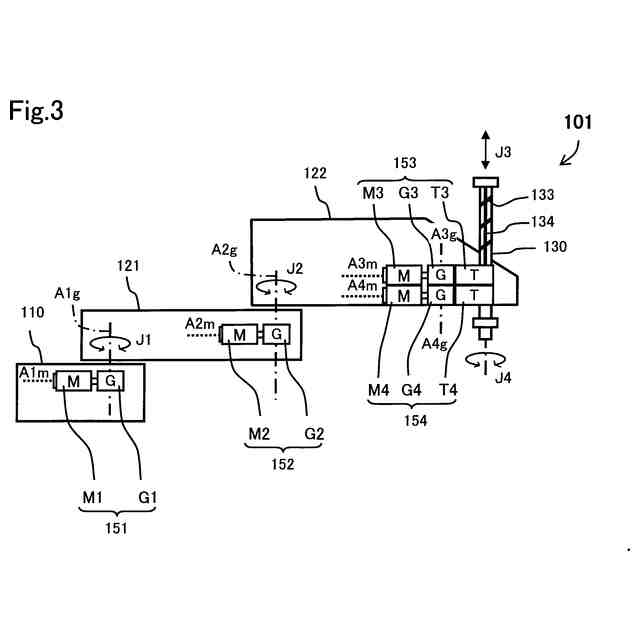
第1実施形態におけるスカラロボットの各軸の駆動装置を示す説明図。
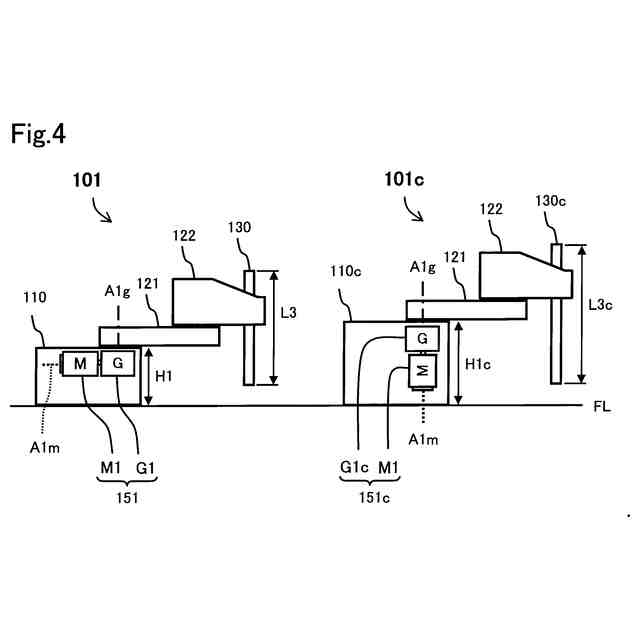
第1減速機の違いによる基台の高さを比較して示す説明図。
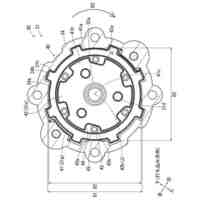
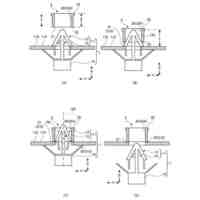
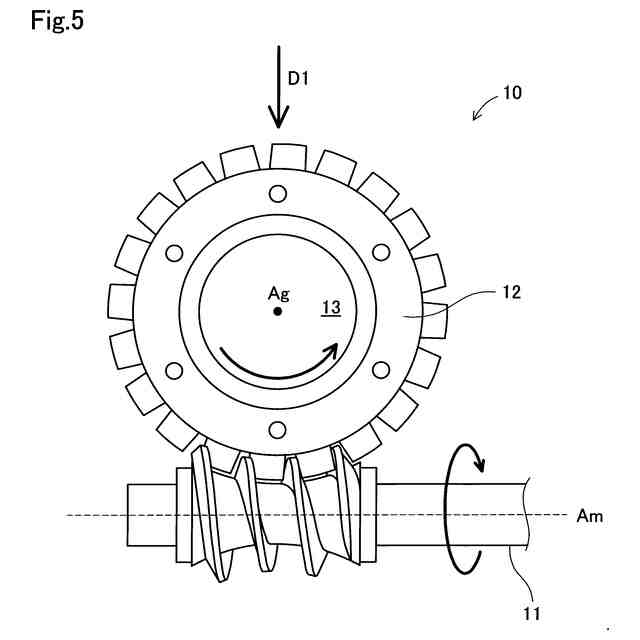
ローラーギヤカム減速機の構成を示す説明図。
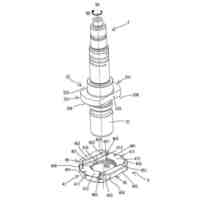
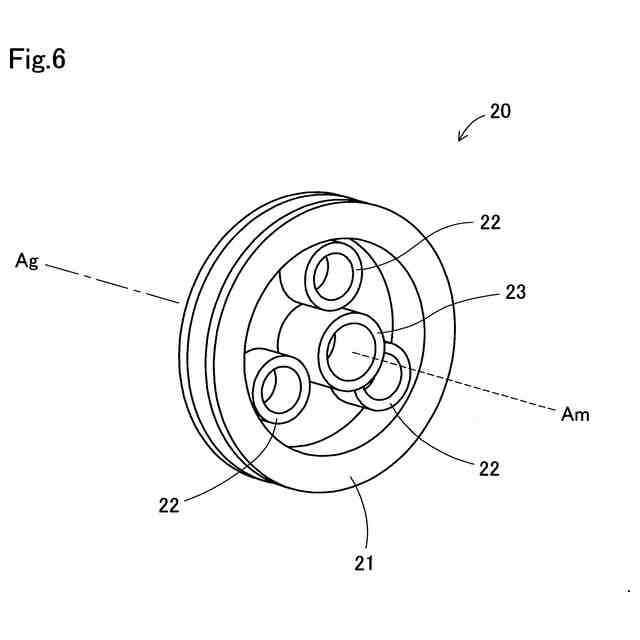
トラクションドライブユニットの構成を示す説明図。
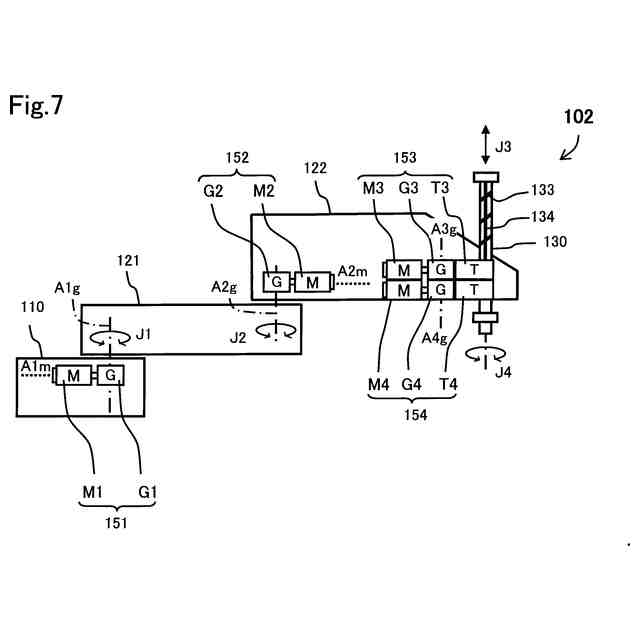
第2実施形態におけるスカラロボットの各軸の駆動装置を示す説明図。
第2実施形態における電気配線の経路を示す説明図。
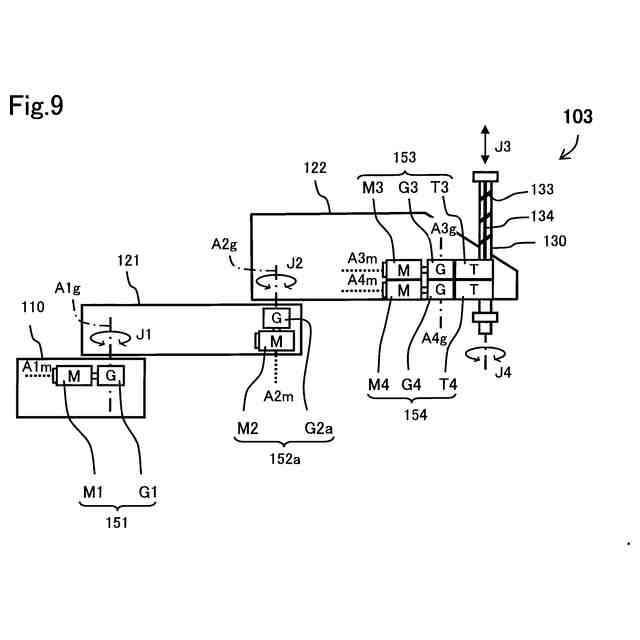
第3実施形態におけるスカラロボットの各軸の駆動装置を示す説明図。
第4実施形態における6軸ロボットの構成を示す説明図。
第5実施形態における6軸ロボットの構成を示す説明図。
【発明を実施するための形態】
【0007】
A.第1実施形態:
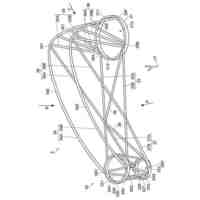
図1は、第1実施形態におけるスカラロボット101の構成を示す説明図であり、図2はその機構図である。スカラロボット101は、基台110と、第1アーム121と、第2アーム122と、シャフト130とを備えている。シャフト130は、第2アーム122の先端部分に設けられている。
【0008】
第1アーム121は、第1関節J1で基台110に接続されており、基台110に対して回転可能に構成されている。第2アーム122は、第2関節J2で第1アーム121に接続されており、第1アーム121に対して回転可能に構成されている。シャフト130は、第3関節J3で第2アーム122の先端部分に接続されており、第2アーム122に対して上下移動可能に構成されている。シャフト130は、更に、第4関節J4で回転可能に支持されている。シャフト130の外周には、らせん状のボールねじ溝133と、シャフト130の中心軸に平行なスプライン溝134とが設けられている。ボールねじ溝133は、第3関節J3でシャフト130を昇降させるために使用される。スプライン溝134は、第4関節J4でシャフト130を回転させるために使用される。シャフト130の下端には、エンドエフェクターが装着される。エンドエフェクターは図示を省略している。基台110と第2アーム122との間には、電気配線140が設けられている。
【0009】
関節J1,J2,J4は、水平回転する回転関節であり、関節J3は上下運動する直動関節である。但し、第3関節J3を回転関節とし、第4関節J4を直動関節としてもよい。第1実施形態のスカラロボット101は、水平多関節ロボットである。なお、関節の数は2以上の任意の整数に設定可能である。
【0010】
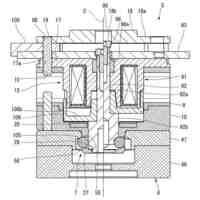
図3は、第1実施形態におけるスカラロボット101の各軸の駆動装置を示す説明図である。基台110には、第1関節J1を駆動する第1駆動装置151が設けられている。第1駆動装置151は、第1アーム121を基台110に対して回転させるように構成されている。第1駆動装置151は、第1モーターM1と、第1モーターM1に接続された第1減速機G1とを有する。第1減速機G1は、入力軸A1mと出力軸A1gとが交差するように構成されている。入力軸A1mは、第1モーターM1の回転軸に相当する。出力軸A1gは、第1関節J1の回転軸に相当する。出力軸A1gは、第1アーム121の筐体に固定されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1日前
日東精工株式会社
電動ドライバ
25日前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
28日前
東京都公立大学法人
対象物把持装置
1か月前
工機ホールディングス株式会社
作業機
16日前
株式会社スター精機
吸着パッド
24日前
工機ホールディングス株式会社
作業機
16日前
工機ホールディングス株式会社
作業機
16日前
株式会社スター精機
吸着パッド
24日前
学校法人五島育英会
アーム機構
1か月前
庄内機械株式会社
釘打装置
1か月前
株式会社アイエイアイ
グリッパー
1か月前
株式会社PILLAR
チューブ保持治具
1か月前
オークラ輸送機株式会社
ハンド装置
9日前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社スター精機
産業用ロボット
22日前
株式会社リコー
多関節ロボット
29日前
川崎重工業株式会社
ロボットシステム
10日前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
電動作業機
1か月前
トヨタ自動車東日本株式会社
搬送治具
1か月前
株式会社ダイヘン
ロボット制御システム
28日前
株式会社ジャノメ
ロボット
18日前
株式会社安川電機
ロボット
22日前
株式会社安川電機
ロボット
22日前
株式会社安川電機
ロボット
22日前
セイコーエプソン株式会社
ロボット
24日前
セイコーエプソン株式会社
ロボット
4日前
小倉クラッチ株式会社
ロボット用ツール交換装置
24日前
株式会社マキタ
電動工具
8日前
個人
回転移動式工具ホルダ
1か月前
株式会社マキタ
回転工具
11日前
株式会社マキタ
電動工具
1か月前
SMC株式会社
コンプライアンスユニット
15日前
個人
工具、工具セット、部材取外し方法
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ