TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025082659
公報種別
公開特許公報(A)
公開日
2025-05-29
出願番号
2023196142
出願日
2023-11-17
発明の名称
軌道生成装置及び軌道生成プログラム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20250522BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
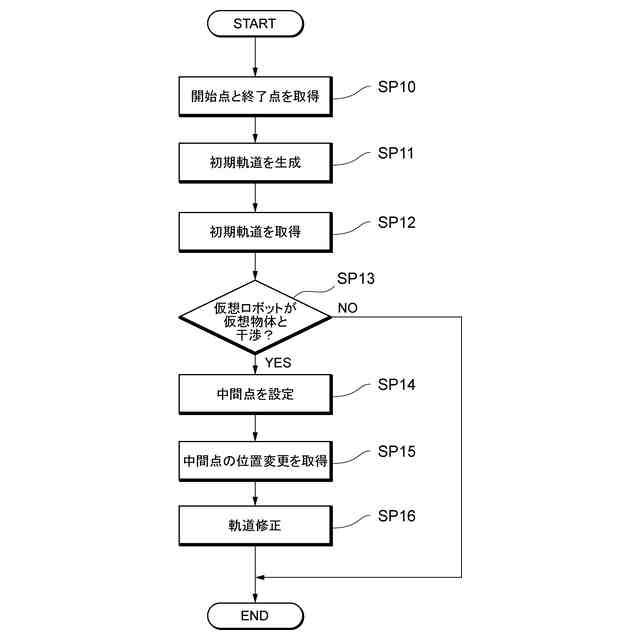
【課題】適切な位置に中間点を容易に設定できることにより、ロボットの軌道修正の手間を軽減することができる軌道生成装置及び軌道生成プログラムを提供する。
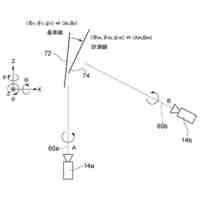
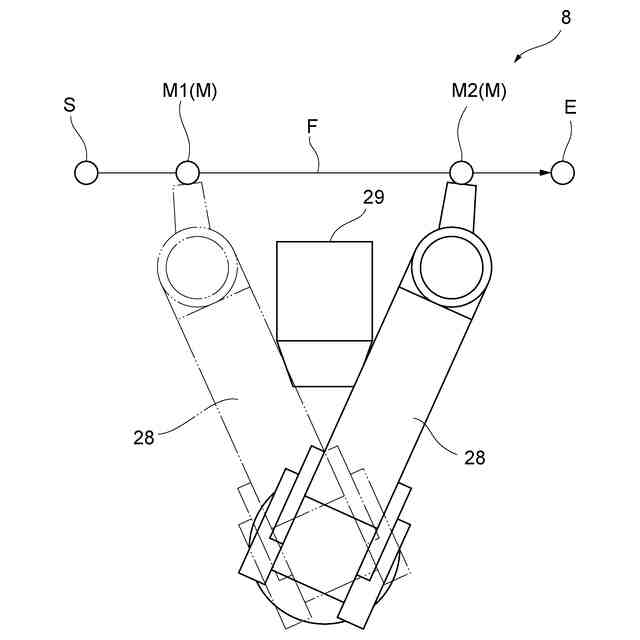
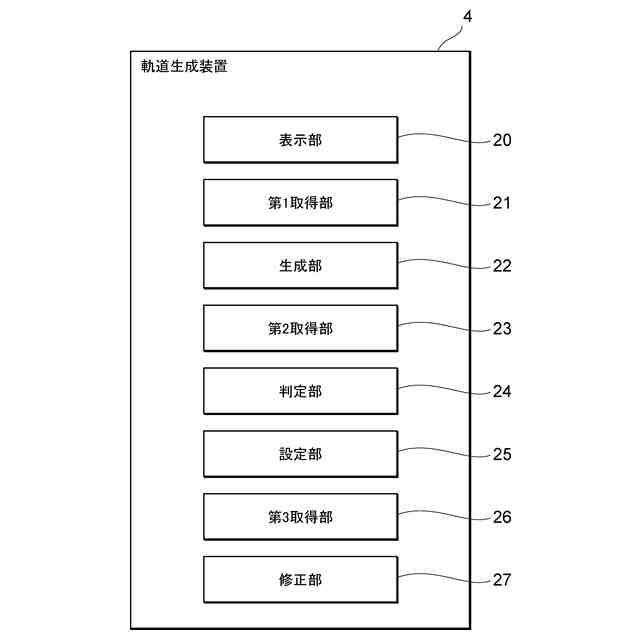
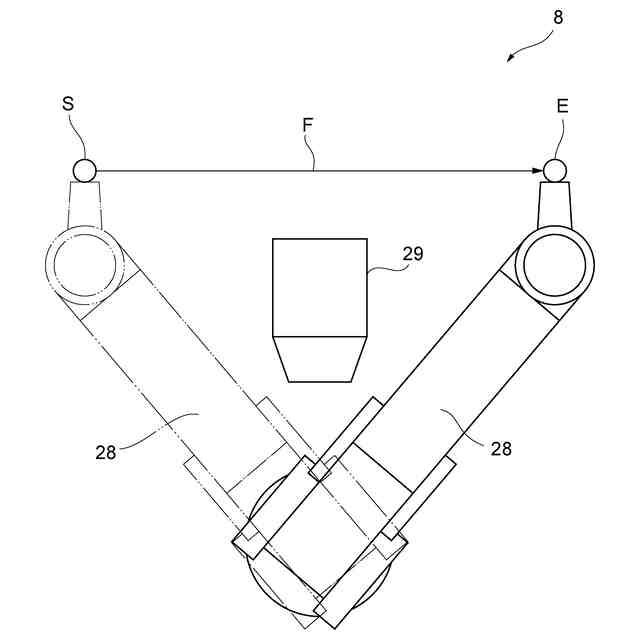
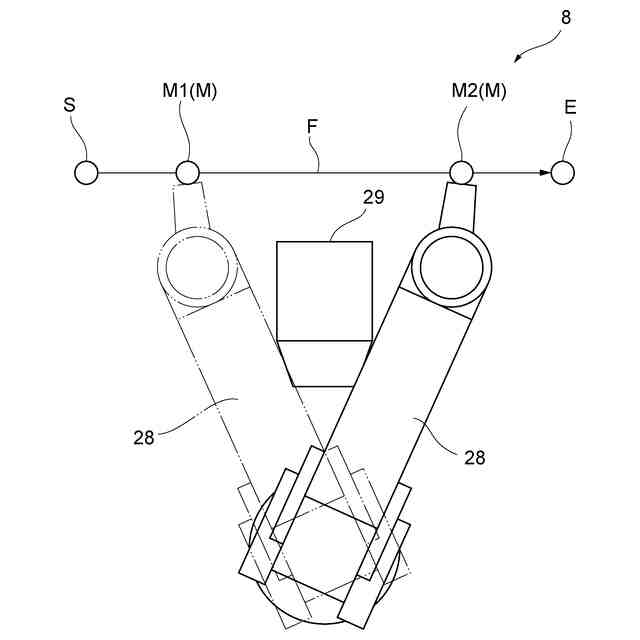
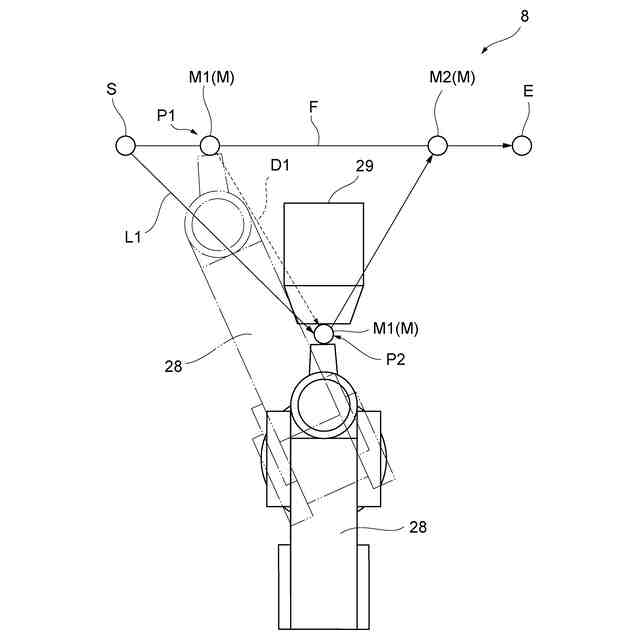
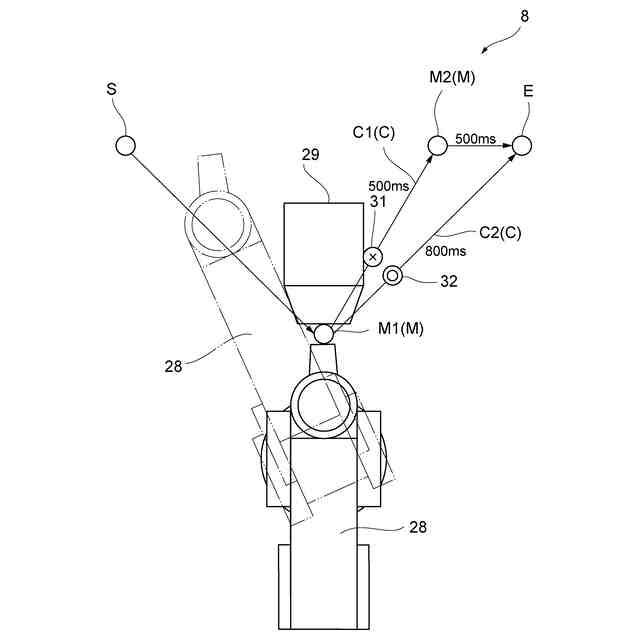
【解決手段】軌道生成装置は、仮想空間8に仮想ロボット28及び仮想物体28を表示する表示部と、仮想ロボット28の動作の開始点Sと、終了点Eとを取得する第1取得部と、開始点Sと終了点Eとを結ぶ初期軌道Fを取得する第2取得部と、初期軌道Fに沿って仮想ロボット28を動作させた場合に、仮想ロボット28が仮想物体28と干渉するか否かを判定する判定部と、仮想ロボット28が仮想物体28と干渉し始める仮想ロボット28の初期軌道F上の位置と、仮想ロボット28が仮想物体28と干渉し終える仮想ロボット28の初期軌道F上の位置とを中間点Mとして設定する設定部と、中間点Mの位置変更に関する指示を取得する第3取得部と、変更後の中間点Mの位置を通過するように初期軌道Fを修正する修正部と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
仮想空間に仮想ロボット及び仮想物体を表示する表示部と、
前記仮想空間における前記仮想ロボットの動作の開始点と、終了点とを取得する第1取得部と、
前記開始点と前記終了点とを結ぶ軌道を取得する第2取得部と、
前記軌道に沿って前記仮想ロボットを動作させた場合に、前記仮想ロボットが前記仮想物体と干渉するか否かを判定する判定部と、
前記仮想ロボットが前記仮想物体と干渉する場合に、前記仮想ロボットが前記仮想物体と干渉し始める前記仮想ロボットの前記軌道上の位置と、前記仮想ロボットが前記仮想物体と干渉し終える前記仮想ロボットの前記軌道上の位置との少なくとも何れか一方の位置を中間点として設定して、前記中間点を前記表示部に表示させる設定部と、
前記中間点の位置変更に関する指示を取得する第3取得部と、
変更後の前記中間点の位置を通過するように前記軌道を修正して前記表示部に表示させる修正部と、
を備えることを特徴とする軌道生成装置。
続きを表示(約 1,000 文字)
【請求項2】
前記第3取得部は、前記仮想空間における前記中間点に対するユーザのドラッグ操作により、前記中間点の位置変更に関する指令を取得することを特徴とする請求項1に記載の軌道生成装置。
【請求項3】
前記中間点は、前記軌道上に複数設定されており、
前記修正部は、前記開始点と、位置変更がされた前記中間点と、前記終了点とを結ぶように前記軌道を修正して複数の候補軌道を生成して前記表示部に表示させ、ユーザにより選択された前記候補軌道を採用軌道とすることを特徴とする請求項1又は2に記載の軌道生成装置。
【請求項4】
前記修正部は、複数の前記候補軌道として、前記開始点と、位置変更がされた前記中間点と、前記終了点とを結び、且つ位置変更がされた前記中間点以外の全ての前記中間点を通過する第1候補軌道、及び、前記第1候補軌道とは異なる軌道であり、前記開始点と、位置変更がされた前記中間点と、前記終了点とを結ぶ第2候補軌道をそれぞれ生成することを特徴とする請求項3に記載の軌道生成装置。
【請求項5】
前記修正部は、前記候補軌道のそれぞれに対して、サイクルタイムと干渉の有無との少なくとも何れか一方を対応付けて前記表示部に表示させることを特徴とする請求項3に記載の軌道生成装置。
【請求項6】
コンピュータを、
仮想空間に仮想ロボット及び仮想物体を表示する表示部、
前記仮想空間における前記仮想ロボットの動作の開始点と、終了点とを取得する第1取得部、
前記開始点と前記終了点とを結ぶ軌道を取得する第2取得部、
前記軌道に沿って前記仮想ロボットを動作させた場合に、前記仮想ロボットが前記仮想物体と干渉するか否かを判定する判定部、
前記仮想ロボットが前記仮想物体と干渉する場合に、前記仮想ロボットが前記仮想物体と干渉し始める前記仮想ロボットの前記軌道上の位置と、前記仮想ロボットが前記仮想物体と干渉し終える前記仮想ロボットの前記軌道上の位置との少なくとも何れか一方の位置を中間点として設定して、前記中間点を前記表示部に表示させる設定部、
前記中間点の位置変更に関する指示を取得する第3取得部、
変更後の前記中間点の位置を通過するように前記軌道を修正して前記表示部に表示させる修正部、
として機能させることを特徴とする軌道生成プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、軌道生成装置及び軌道生成プログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
自動車や電機製品等の工業製品の生産ラインに産業用のロボットが配置され、ロボットが所定の作業をワークに対して実行することが一般的に行われている。
【0003】
例えば特許文献1は、ロボットに対して所定の作業を実行させるために、ロボットの動作の設計において仮想空間上のシミュレーションを利用することが開示されている。特許文献1では、動作の開始点と終了点との間に中間点を設定し、中間点に対して移動距離等を入力して軌道の修正を行う。
【先行技術文献】
【特許文献】
【0004】
特許第5978890号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、中間点がユーザにより設定される場合やランダムに設定される場合、適切に軌道を修正するために手間を要する可能性がある。特に操作に慣れないユーザにとっては、中間点を適切な位置へ設定することが困難であり、また、中間点がランダムに設定されたとしても位置を修正すべき中間点を特定することが困難である。
【0006】
上記課題に鑑み、本発明は、適切な位置に中間点を容易に設定できることにより、ロボットの軌道修正の手間を軽減することができる軌道生成装置及び軌道生成プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
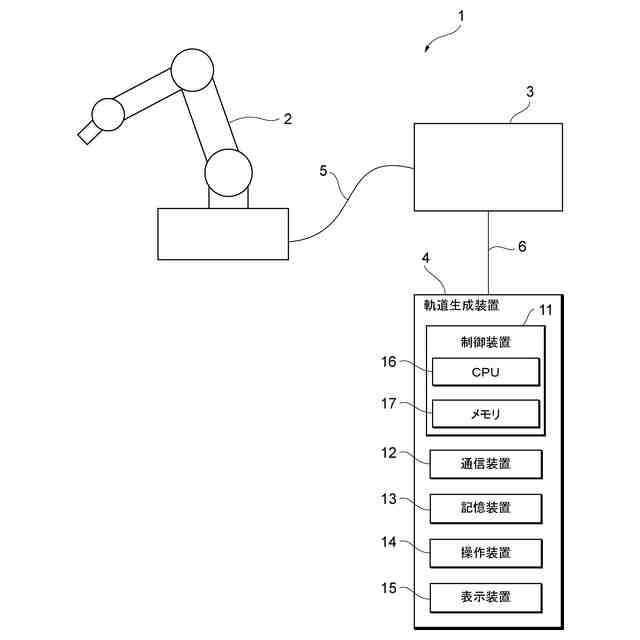
上記課題を解決するために、本発明に係る軌道生成装置は、仮想空間に仮想ロボット及び仮想物体を表示する表示部と、前記仮想空間における前記仮想ロボットの動作の開始点と、終了点とを取得する第1取得部と、前記開始点と前記終了点とを結ぶ軌道を取得する第2取得部と、前記軌道に沿って前記仮想ロボットを動作させた場合に、前記仮想ロボットが前記仮想物体と干渉するか否かを判定する判定部と、前記仮想ロボットが前記仮想物体と干渉する場合に、前記仮想ロボットが前記仮想物体と干渉し始める前記仮想ロボットの前記軌道上の位置と、前記仮想ロボットが前記仮想物体と干渉し終える前記仮想ロボットの前記軌道上の位置との少なくとも何れか一方の位置を中間点として設定して、前記中間点を前記表示部に表示させる設定部と、前記中間点の位置変更に関する指示を取得する第3取得部と、変更後の前記中間点の位置を通過するように前記軌道を修正して前記表示部に表示させる修正部と、を備える。
【0008】
また、軌道生成装置において、前記第3取得部は、前記仮想空間における前記中間点に対するユーザのドラッグ操作により、前記中間点の位置変更に関する指令を取得する。
【0009】
また、軌道生成装置において、前記中間点は、前記軌道上に複数設定されており、
前記修正部は、前記開始点と、位置変更がされた前記中間点と、前記終了点とを結ぶように前記軌道を修正して複数の候補軌道を生成して前記表示部に表示させ、ユーザにより選択された前記候補軌道を採用軌道とする。
【0010】
また、軌道生成装置において、前記修正部は、複数の前記候補軌道として、前記開始点と、位置変更がされた前記中間点と、前記終了点とを結び、且つ位置変更がされた前記中間点以外の全ての前記中間点を通過する第1候補軌道、及び、前記第1候補軌道とは異なる軌道であり、前記開始点と、位置変更がされた前記中間点と、前記終了点とを結ぶ第2候補軌道、をそれぞれ生成する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
蓄圧装置
12日前
株式会社不二越
ソレノイド
2か月前
株式会社不二越
NC転造盤
1か月前
株式会社不二越
波形抽出装置
1か月前
株式会社不二越
ベーンポンプ
16日前
株式会社不二越
摩耗判定装置
1か月前
株式会社不二越
保持器付き軸受
14日前
株式会社不二越
ロボットシステム
1日前
株式会社不二越
協働ロボットシステム
12日前
株式会社不二越
真空熱処理装置の排気構造
2か月前
株式会社不二越
情報処理装置及びプログラム
1か月前
株式会社不二越
製品選定装置及びプログラム
12日前
株式会社不二越
複合加工機およびツーリング
2か月前
株式会社不二越
X線回折測定装置及びプログラム
今日
株式会社不二越
合金鋼およびそれを用いた機械部品
1か月前
株式会社不二越
ロボット制御装置及びロボット制御方法
8日前
株式会社不二越
物体検出システム及びロボットシステム
1日前
株式会社不二越
可変抵抗器自動調整システム、油圧システム
今日
株式会社不二越
鉄酸化物膜、合金鋼および鉄酸化物膜形成方法
2か月前
株式会社不二越
環境地図生成プログラム及び3次元センサ制御装置
1日前
株式会社不二越
皮膜付き軸受およびこれに用いられるしゅう動皮膜剤
1か月前
株式会社不二越
鉄酸化物膜、鉄酸化物膜被覆部材、鉄酸化物膜被覆部材用合金鋼および鉄酸化物膜被覆部材の製造方法
1か月前
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
ホシデン株式会社
分解用治具
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ