TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025116989
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011583
出願日
2024-01-30
発明の名称
物体検出システム及びロボットシステム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
G06T
7/70 20170101AFI20250804BHJP(計算;計数)
要約
【課題】二台のカメラを用いて物体を検出する場合、より簡易な方法で、少なくとも物体の姿勢を検出可能な物体検出システム及びロボットシステムを提供する。
【解決手段】物体検出システム(10)の画像解析装置(16)は、第一画像データ(Img1)から第一カメラ(14a)の第一光軸(60a)周りの回転位置を示す第一角度(Am)を求めるとともに、第二画像データ(Img2)から第二カメラ(14b)の第二光軸(60b)周りの回転位置を示す第二角度(Bm)を求め、第一角度(Am)及び第二角度(Bm)を三次元空間上における物体(12)の三軸周りの角度(φm,θm,ψm)に変換する。
【選択図】図6
特許請求の範囲
【請求項1】
三次元空間上にある物体を撮影して第一画像データを出力する第一カメラと、
前記第一カメラとは異なる位置に配置され、かつ前記物体を撮影して第二画像データを出力する第二カメラと、
前記第一カメラ及び前記第二カメラが接続されている画像解析装置と、を備え、
前記画像解析装置は、
前記第一画像データから前記第一カメラの第一光軸周りの回転位置を示す第一角度を求めるとともに、前記第二画像データから前記第二カメラの第二光軸周りの回転位置を示す第二角度を求める画像処理と、
前記画像処理により求められた前記第一角度及び前記第二角度を、前記三次元空間上における前記物体の三軸周りの角度に変換する変換処理と、
を実行することを特徴とする物体検出システム。
続きを表示(約 920 文字)
【請求項2】
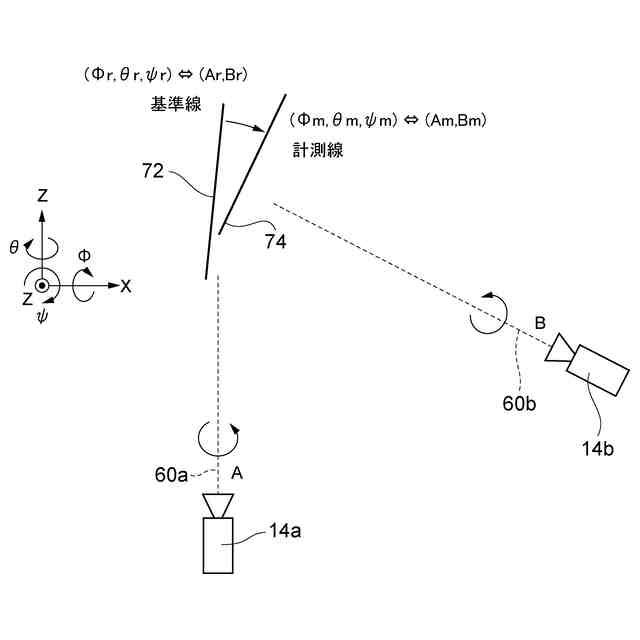
前記変換処理において、第一基準角及び第二基準角から変換される前記三軸周りの角度方向に延びる直線を基準線と定義し、第一計測角及び第二計測角から変換される前記三軸周りの角度方向に延びる直線を計測線と定義するとき、
前記第一角度は、前記第一計測角から前記第一基準角を引いた量であり、
前記第二角度は 、前記第二計測角から前記第二基準角を引いた量であり、
前記画像解析装置は、前記基準線に対する前記計測線の傾き量を、前記三軸周りの角度の変化量として求める差分処理をさらに実行することを特徴とする請求項1に記載の物体検出システム。
【請求項3】
前記基準線は、前記第一光軸を包含しかつ前記第一基準角に対応する平面と、前記第二光軸を包含しかつ前記第二基準角に対応する平面とが交わる直線であり、
前記計測線は、前記第一光軸を包含しかつ前記第一計測角に対応する平面と、前記第二光軸を包含しかつ前記第二計測角に対応する平面とが交わる直線であることを特徴とする請求項2に記載の物体検出システム。
【請求項4】
三次元空間上にあるワークに処理を行うロボットと、
前記ワークを撮影して第一画像データを出力する第一カメラと、
前記第一カメラとは異なる位置に配置され、かつ前記ワークを撮影して第二画像データを出力する第二カメラと、
前記第一カメラ及び前記第二カメラが接続されており、かつ前記ロボットの駆動制御を行う制御装置と、を備え、
前記制御装置は、
前記第一画像データから前記第一カメラの第一光軸周りの回転位置を示す第一角度を求めるとともに、前記第二画像データから前記第二カメラの第二光軸周りの回転位置を示す第二角度を求める画像処理と、
前記画像処理により求められた前記第一角度及び前記第二角度を、前記三次元空間上における前記物体の三軸周りの角度に変換する変換処理と、
前記変換処理により変換された前記三軸周りの角度に基づいて、前記駆動制御に関する制御量を決定する決定処理と、
を実行することを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物体を検出する物体検出システム、及び、ワークを処理するロボットを含んで構成されるロボットシステムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
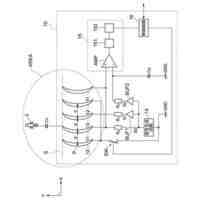
従来から、複数台のカメラを用いて、物体を検出する物体検出システムが知られている。例えば、特許文献1に、ステレオ計測原理(いわゆる、三角測量法)に基づいて、物体の三次元位置・姿勢を認識する手法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第3525896号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記した三角測量法では、二台のカメラ間の共通点を計算するステレオマッチングに時間がかかるという問題がある。また、三角測量法では、計測点がカメラの共通視野にないと物体の位置・姿勢を計測できないという問題がある。
【0005】
本発明はこのような問題に鑑みてなされたものであり、その目的は、二台のカメラを用いて物体を検出する場合、より簡易な方法で、少なくとも物体の姿勢を検出可能な物体検出システム及びロボットシステムを提供することにある。
【課題を解決するための手段】
【0006】
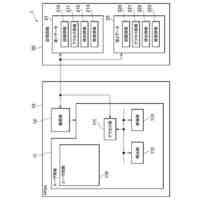
本発明の物体検出システムは、三次元空間上にある物体を撮影して第一画像データを出力する第一カメラと、前記第一カメラとは異なる位置に配置され、かつ前記物体を撮影して第二画像データを出力する第二カメラと、前記第一カメラ及び前記第二カメラが接続されている画像解析装置と、を備え、前記画像解析装置は、前記第一画像データから前記第一カメラの第一光軸周りの回転位置を示す第一角度を求めるとともに、前記第二画像データから前記第二カメラの第二光軸周りの回転位置を示す第二角度を求める画像処理と、前記画像処理により求められた前記第一角度及び前記第二角度を、前記三次元空間上における前記物体の三軸周りの角度に変換する変換処理と、を実行する。
【0007】
また、前記変換処理において、前記第一基準角及び前記第二基準角から変換される前記三軸周りの角度方向に延びる直線を基準線と定義し、前記第一計測角及び前記第二計測角から変換される前記三軸周りの角度方向に延びる直線を計測線と定義するとき、前記第一角度は、前記第一計測角から前記第一基準角を引いた量であり、前記第二角度は、前記第二計測角から前記第二基準角を引いた量であり、前記画像解析装置は、前記基準線に対する前記計測線の傾き量を、前記三軸周りの角度の変化量として求める差分処理をさらに実行してもよい。
【0008】
また、前記基準線は、前記第一光軸を包含しかつ前記第一基準角に対応する平面と、前記第二光軸を包含しかつ前記第二基準角に対応する平面とが交わる直線であり、前記計測線は、前記第一光軸を包含しかつ前記第一計測角に対応する平面と、前記第二光軸を包含しかつ前記第二計測角に対応する平面とが交わる直線であってもよい。
【0009】
本発明におけるロボットシステムは、三次元空間上にあるワークに処理を行うロボットと、前記ワークを撮影して第一画像データを出力する第一カメラと、前記第一カメラとは異なる位置に配置され、かつ前記ワークを撮影して第二画像データを出力する第二カメラと、前記第一カメラ及び前記第二カメラが接続されており、かつ前記ロボットの駆動制御を行う制御装置と、を備え、前記制御装置は、前記第一画像データから前記第一カメラの第一光軸周りの回転位置を示す第一角度を求めるとともに、前記第二画像データから前記第二カメラの第二光軸周りの回転位置を示す第二角度を求める画像処理と、前記画像処理により求められた前記第一角度及び前記第二角度を、前記三次元空間上における前記物体の三軸周りの角度に変換する変換処理と、前記変換処理により変換された前記三軸周りの角度に基づいて、前記駆動制御に関する制御量を決定する決定処理と、を実行する。
【発明の効果】
【0010】
本発明によれば、二台のカメラを用いて物体を検出する場合、より簡易な方法で、少なくとも物体の姿勢を検出することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社不二越
熱処理システム
5日前
株式会社不二越
アクチュエータ
5日前
株式会社不二越
ロボットシステム
3日前
株式会社不二越
ロボットシステム
6日前
株式会社不二越
ロボット操作装置
11日前
株式会社不二越
スカイビング加工機
13日前
株式会社不二越
スカイビング加工機
13日前
株式会社不二越
センサ及びセンサを備えるロボット
11日前
株式会社不二越
データ修復機能を有する回路システム
9日前
株式会社不二越
マルテンサイト系ステンレス鋼焼結体
12日前
株式会社不二越
マルテンサイト系ステンレス鋼焼結体
17日前
株式会社不二越
転がり軸受用転動体およびそれを用いた転がり軸受
13日前
個人
裁判のAI化
1か月前
個人
情報処理システム
2か月前
個人
フラワーコートA
1か月前
個人
工程設計支援装置
1か月前
個人
検査システム
2か月前
個人
記入設定プラグイン
2か月前
個人
介護情報提供システム
1か月前
個人
為替ポイント伊達夢貯
10日前
個人
冷凍食品輸出支援構造
10日前
個人
設計支援システム
1か月前
個人
設計支援システム
1か月前
個人
表変換編集支援システム
3日前
個人
携帯情報端末装置
1か月前
個人
知財出願支援AIシステム
10日前
個人
不動産売買システム
2か月前
キヤノン電子株式会社
携帯装置
2か月前
株式会社サタケ
籾摺・調製設備
2か月前
個人
結婚相手紹介支援システム
27日前
個人
パスワード管理支援システム
3日前
株式会社カクシン
支援装置
1か月前
個人
行動時間管理システム
5日前
個人
AIによる情報の売買の仲介
12日前
個人
アンケート支援システム
1か月前
個人
パスポートレス入出国システム
16日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ