TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025117004
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011626
出願日
2024-01-30
発明の名称
環境地図生成プログラム及び3次元センサ制御装置
出願人
株式会社不二越
代理人
個人
主分類
G09B
29/00 20060101AFI20250804BHJP(教育;暗号方法;表示;広告;シール)
要約
【課題】動体が存在する環境でも、正確かつ高速に環境地図を生成可能な環境地図生成プログラムを提供する。
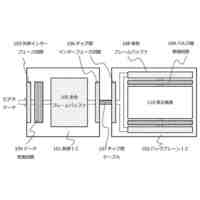
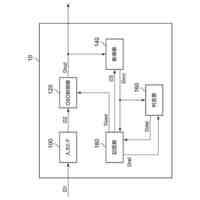
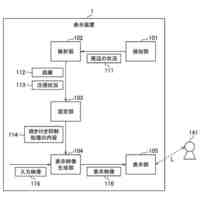
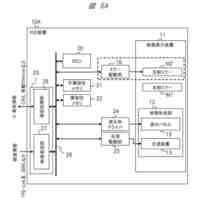
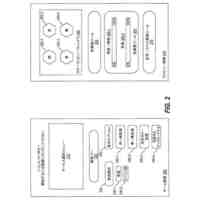
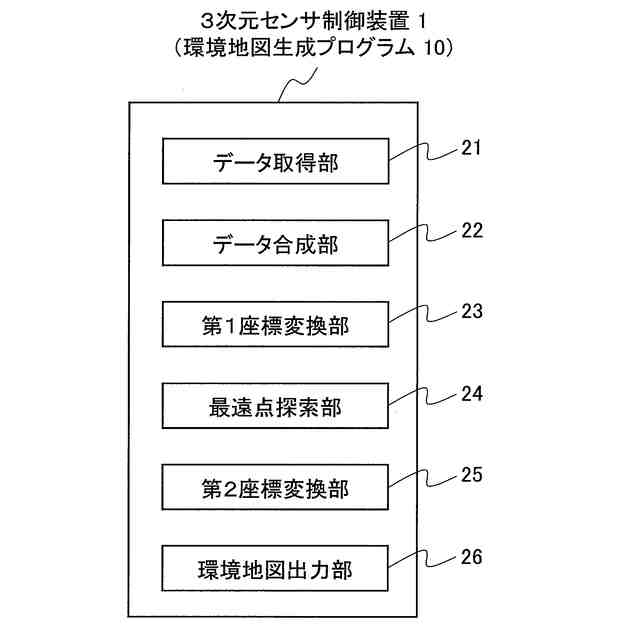
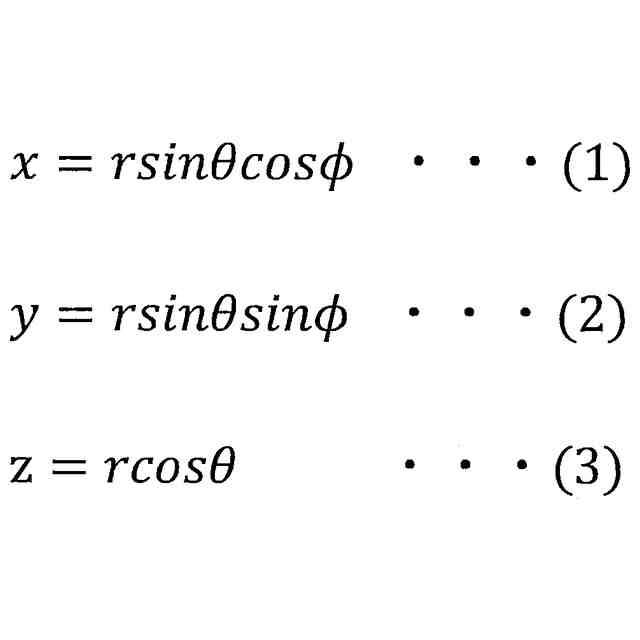
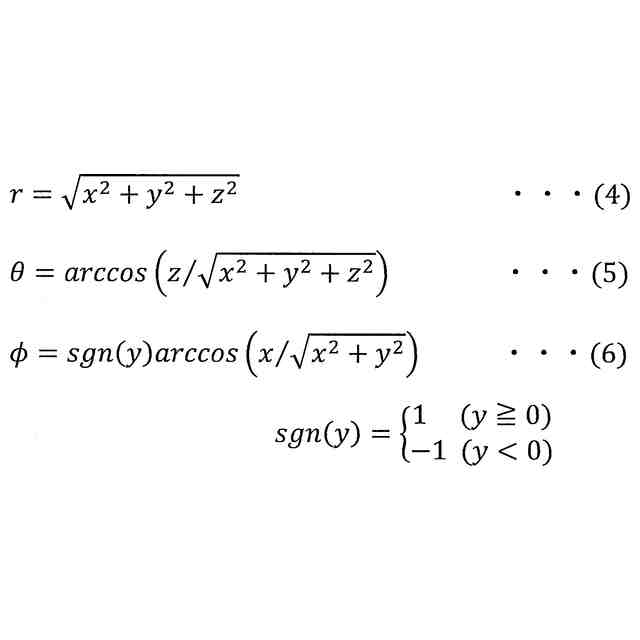
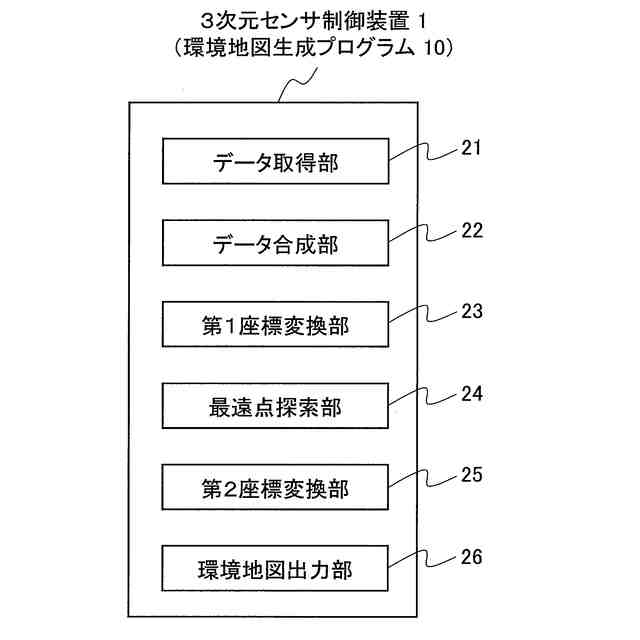
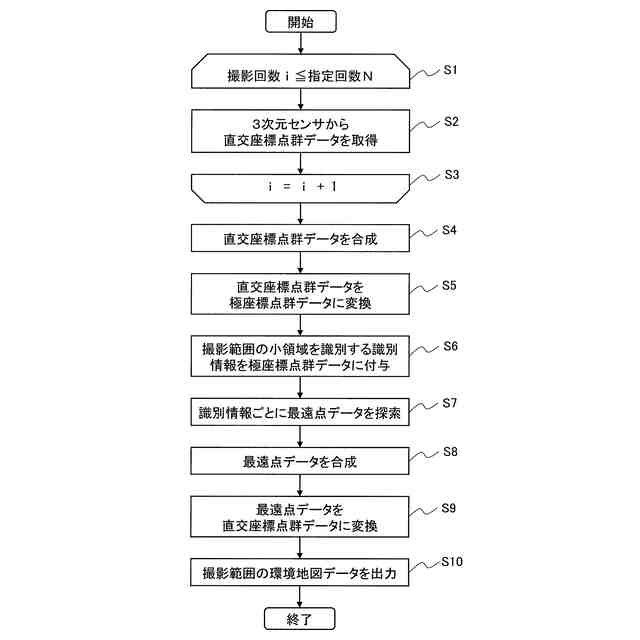
【解決手段】環境地図生成プログラム10は、コンピュータを、撮影範囲が固定された3次元センサによって撮影される複数の撮影フレームの直交座標点群データを取得するデータ取得部21、直交座標から極座標への第1変換式に基づいて、直交座標点群データを極座標点群データに変換する第1座標変換部23、撮影範囲の小領域ごとに3次元センサからの距離が最も遠い極座標点群データを最遠点データとして探索する最遠点探索部24、極座標から直交座標への第2変換式に基づいて、最遠点データを直交座標点群データに変換する第2座標変換部25、第2座標変換部25によって得られる直交座標点群データに基づいて撮影範囲の環境地図データを出力する環境地図出力部26として機能させるためのプログラムである。
【選択図】図2
特許請求の範囲
【請求項1】
コンピュータを、
撮影範囲が固定された3次元センサによって撮影される複数の撮影フレームの直交座標点群データを取得するデータ取得部、
直交座標から極座標への第1変換式に基づいて、前記直交座標点群データを極座標点群データに変換する第1座標変換部、
前記撮影範囲の小領域ごとに前記3次元センサからの距離が最も遠い前記極座標点群データを最遠点データとして探索する最遠点探索部、
前記極座標から前記直交座標への第2変換式に基づいて、前記最遠点データを前記直交座標点群データに変換する第2座標変換部、
前記第2座標変換部によって得られる前記直交座標点群データに基づいて前記撮影範囲の環境地図データを出力する環境地図出力部、
として機能させることを特徴とする環境地図生成プログラム。
続きを表示(約 420 文字)
【請求項2】
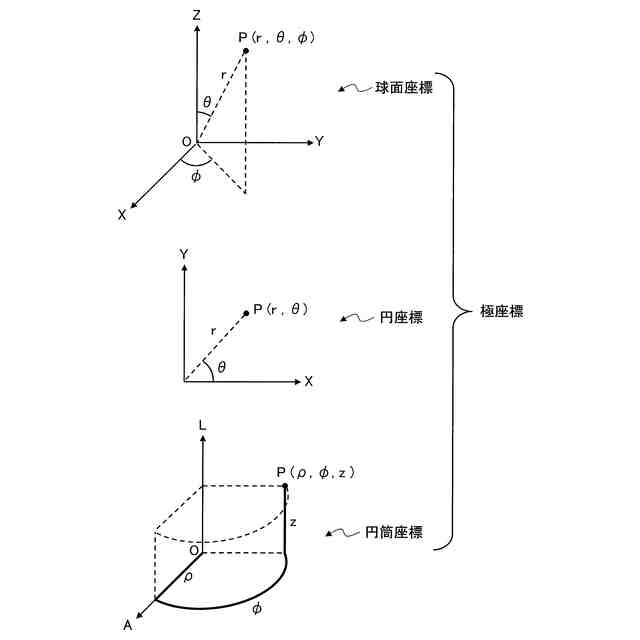
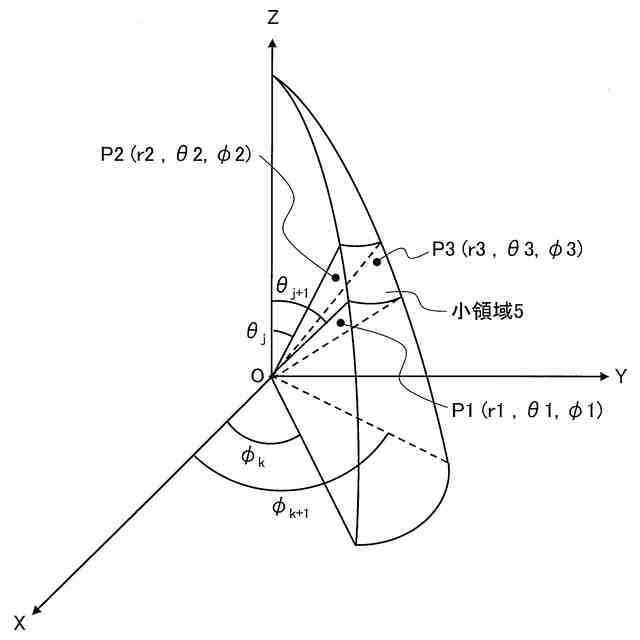
前記極座標は、動径、極角及び方位角を成分とする球面座標であるとともに、前記小領域は、前記極角及び前記方位角によって分割され、
前記最遠点探索部は、前記小領域ごとに前記動径の値が最も大きい前記極座標点群データを前記最遠点データとして探索する
ことを特徴とする請求項1に記載の環境地図生成プログラム。
【請求項3】
前記第1座標変換部は、前記極座標点群データの前記極角及び前記方位角の値に基づいて前記小領域を識別する識別情報を付与し、
前記最遠点探索部は、前記識別情報ごとに前記3次元センサからの距離が最も遠い前記極座標点群データを前記最遠点データとして探索する
ことを特徴とする請求項2に記載の環境地図生成プログラム。
【請求項4】
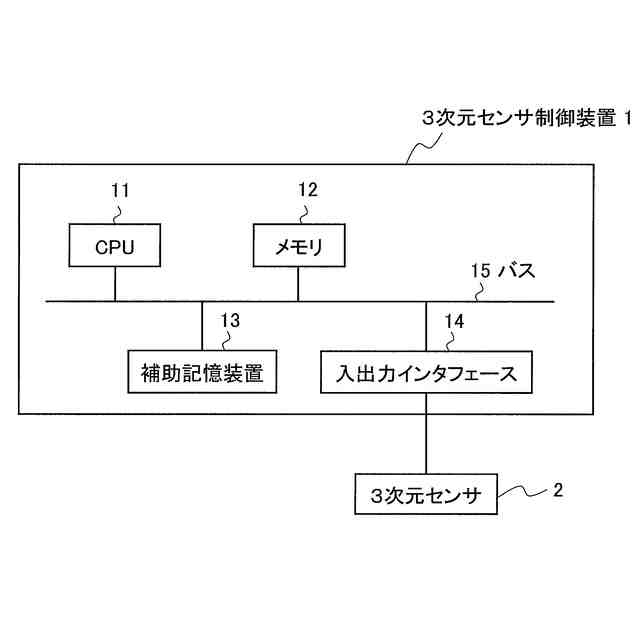
請求項1に記載の前記環境地図生成プログラムがインストールされ、前記3次元センサを動作制御する3次元センサ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、環境地図を生成するための環境地図生成プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
車両の自動運転、自律移動ロボット(AGV:Automatic Guided Vehicle)・協働ロボット・配膳ロボット・ロボット掃除機・ドローンの制御、AR(Augmented Reality:拡張現実)技術等では、周辺の環境地図が必要になる。従来、環境地図の作成技術としてSLAM(Simultaneous Localization and Mapping:自己位置推定と環境地図作成の同時実行)という手法が活用されている。SLAMは、一定の条件下において自己位置推定と環境地図作成とを実行できる。例えば、特許文献1に、LiDAR(Light Detection and Ranging:光検出と測距)センサを用いたLiDAR SLAMによって空間データ等を収集することが記載されている。一般に、LiDARセンサ等の3次元センサは、3次元座標(x,y,z)で表現される点群(Point Cloud)データを取得する。
【先行技術文献】
【特許文献】
【0003】
特開2022-134119号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のSLAMでは3つの課題がある。第1に、点群データの密度は、一般的な静止画像の解像度に比べて粗いため、点群データ同士のマッチング(=点群マッチング)が十分に行えない場合がある。例えば、平原などの構造特徴が乏しい場所では点群マッチングが十分に行えず、環境地図が上手く生成できない。第2に、点群マッチングは処理負荷が高いため、高スペックのコンピュータが必要になる、或いは高速化の工夫が必要になる。第3に、SLAMは、環境が静的と仮定するため、人間等の動体が存在する環境では、動体をランドマークとして認識し、誤った環境地図を作成してしまう場合がある。
【0005】
本発明は、前述した問題点に鑑みてなされたものであり、その目的は、動体が存在する環境でも、正確かつ高速に環境地図を生成可能な環境地図生成プログラムや3次元センサ制御装置を提供することである。
【課題を解決するための手段】
【0006】
前述した目的を達成するための第1の発明は、コンピュータを、撮影範囲が固定された3次元センサによって撮影される複数の撮影フレームの直交座標点群データを取得するデータ取得部、直交座標から極座標への第1変換式に基づいて、前記直交座標点群データを極座標点群データに変換する第1座標変換部、前記撮影範囲の小領域ごとに前記3次元センサからの距離が最も遠い前記極座標点群データを最遠点データとして探索する最遠点探索部、前記極座標から前記直交座標への第2変換式に基づいて、前記最遠点データを前記直交座標点群データに変換する第2座標変換部、前記第2座標変換部によって得られる前記直交座標点群データに基づいて前記撮影範囲の環境地図データを出力する環境地図出力部、として機能させることを特徴とする環境地図生成プログラムである。
【0007】
前記極座標は、動径、極角及び方位角を成分とする球面座標であるとともに、前記小領域は、前記極角及び前記方位角によって分割され、前記最遠点探索部は、前記小領域ごとに前記動径の値が最も大きい前記極座標点群データを前記最遠点データとして探索するようにしても良い。
【0008】
また、前記第1座標変換部は、前記極座標点群データの前記極角及び前記方位角の値に基づいて前記小領域を識別する識別情報を付与し、前記最遠点探索部は、前記識別情報ごとに前記3次元センサからの距離が最も遠い前記極座標点群データを前記最遠点データとして探索するするようにしても良い。
【0009】
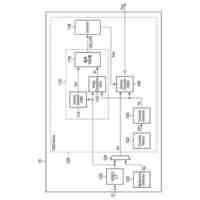
第2の発明は、第1の発明の前記環境地図生成プログラムがインストールされ、前記3次元センサを動作制御する3次元センサ制御装置である。
【発明の効果】
【0010】
本発明により、動体が存在する環境でも、正確かつ高速に環境地図を生成可能な環境地図生成プログラムや3次元センサ制御装置等を提供できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
時刻表示機能つき手帳
7日前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
車両用表示装置
5日前
日本精機株式会社
車両用表示装置
5日前
日本精機株式会社
車両用表示装置
今日
トヨタ自動車株式会社
評価方法
22日前
シャープ株式会社
表示装置
1か月前
パイオニア株式会社
表示装置
1か月前
個人
口唇閉鎖の訓練具
1か月前
株式会社半導体エネルギー研究所
半導体装置
7日前
株式会社ノジマ
応対体験システム
1か月前
株式会社バンダイ
情報処理装置およびプログラム
1か月前
シチズンファインデバイス株式会社
液晶表示装置
今日
個人
サインポスト
16日前
朝日インテック株式会社
心臓モデル装置
1か月前
シャープ株式会社
表示装置
今日
個人
ピアノの指トレーニング器具及び練習方法
21日前
株式会社リコー
システムおよび方法
1か月前
ニデックインスツルメンツ株式会社
情報処理装置
12日前
個人
トレーニング用具
13日前
株式会社半導体エネルギー研究所
駆動回路、及び半導体装置
19日前
ローム株式会社
半導体装置および表示システム
1か月前
ローム株式会社
半導体装置および表示システム
1か月前
グンゼ株式会社
熱収縮性フィルム及び包装容器
1か月前
TOPPANホールディングス株式会社
ラベル
1日前
ローム株式会社
表示制御装置
22日前
シャープ株式会社
表示装置及び焼き付き抑制方法
1か月前
セイコーエプソン株式会社
投射型表示装置
今日
株式会社シルキー・アクト
スタンドキット
1か月前
マクセル株式会社
虚像表示装置
8日前
遠視界科技股分有限公司
スクリーン拡大表示装置
1か月前
パナソニックIPマネジメント株式会社
表示装置
12日前
大阪シーリング印刷株式会社
積層ラベル
15日前
東芝テック株式会社
拡張カラー表示
15日前
アルプスアルパイン株式会社
映像表示装置
13日前
セイコーエプソン株式会社
表示装置及び電子機器
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ