TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025042755
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023149868
出願日
2023-09-15
発明の名称
ロボット操作装置
出願人
株式会社不二越
代理人
個人
主分類
B25J
13/02 20060101AFI20250321BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】外付け操作ユニットを用いたとしても、物理的なボタンの数が少なく、操作性が高いロボット操作装置を提供する。
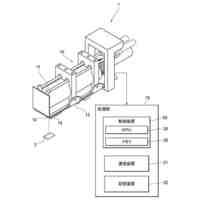
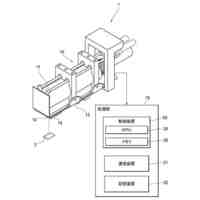
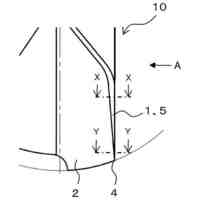
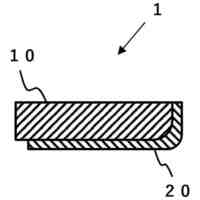
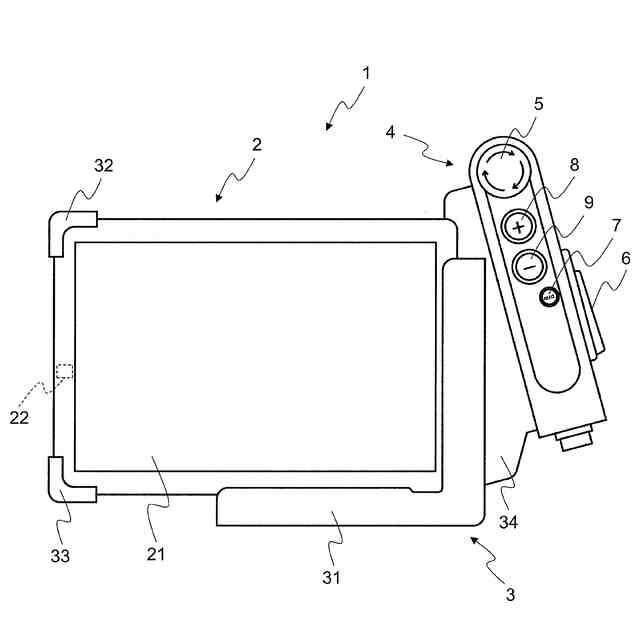
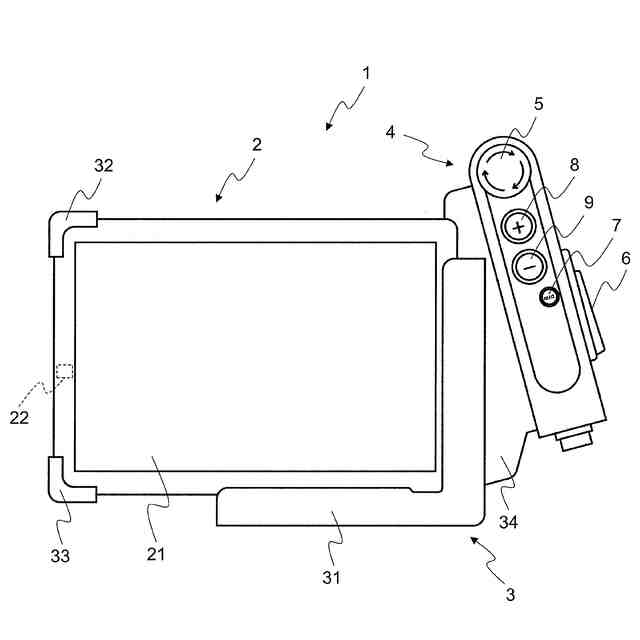
【解決手段】ロボット操作装置1は、タッチパネルディスプレイ21を有する携帯端末2と外付け操作ユニット4とを有する。外付け操作ユニット4は、手動操作によるロボットの手動操作方向の正の向きへの移動を指示する正ボタン8と、手動操作方向の負の向きへの移動を指示する負ボタン9と、を有する。携帯端末2は、タッチパネルディスプレイ21又は外付け操作ユニット4に対する入力に基づいて手動操作方向を決定し、正ボタン8又は負ボタン9が押下されている間、決定された手動操作方向の正の向き又は負の向きへの移動命令をロボットに送信する。
【選択図】図1
特許請求の範囲
【請求項1】
タッチパネルディスプレイを有する携帯端末と外付け操作ユニットとを有するロボット操作装置であって、
前記外付け操作ユニットは、手動操作による前記ロボットの手動操作方向の正の向きへの移動を指示する正ボタンと、前記手動操作方向の負の向きへの移動を指示する負ボタンと、を有し、
前記携帯端末は、前記タッチパネルディスプレイ又は前記外付け操作ユニットに対する入力に基づいて前記手動操作方向を決定し、前記正ボタン又は前記負ボタンが押下されている間、決定された前記手動操作方向の正の向き又は負の向きへの移動命令を前記ロボットに送信することを特徴とするロボット操作装置。
続きを表示(約 650 文字)
【請求項2】
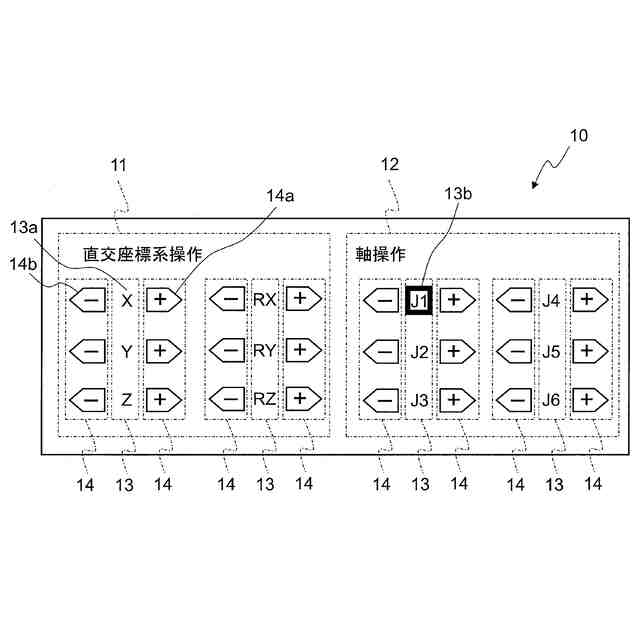
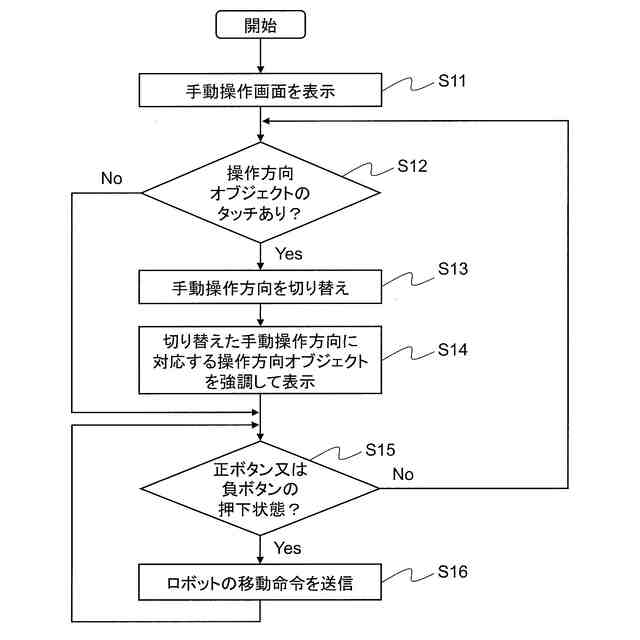
前記携帯端末は、前記タッチパネルディスプレイに手動操作画面を表示し、前記手動操作画面に表示される操作方向オブジェクトがタッチされると、タッチされた前記操作方向オブジェクトに基づいて前記手動操作方向を切り替えるとともに、切り替えた前記手動操作方向に対応する前記操作方向オブジェクトを強調して表示することを特徴とする請求項1に記載のロボット操作装置。
【請求項3】
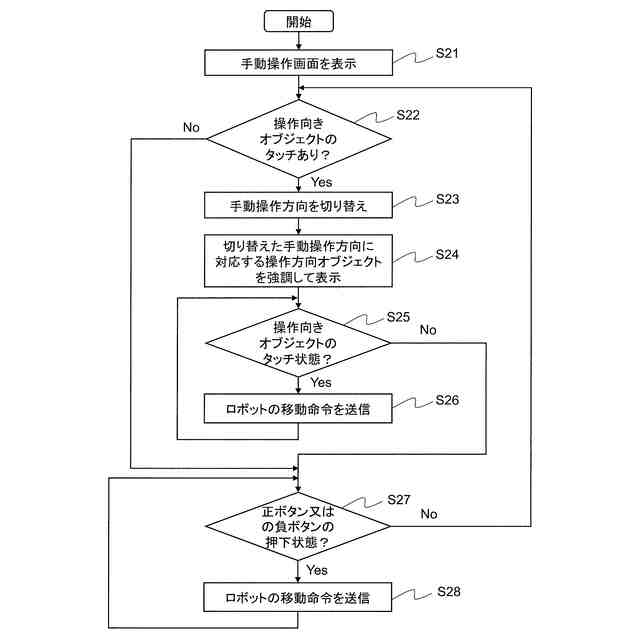
前記携帯端末は、前記タッチパネルディスプレイに手動操作画面を表示し、前記手動操作画面に表示される操作向きオブジェクトがタッチされると、タッチされた前記操作向きオブジェクトに基づいて前記手動操作方向を切り替えるとともに、切り替えた前記手動操作方向に対応する前記操作向きオブジェクトを強調して表示し、更に、前記操作向きオブジェクトがタッチされている間、タッチされている前記操作向きオブジェクトに対応する前記手動操作方向の向きへの移動命令を前記ロボットに送信することを特徴とする請求項1に記載のロボット操作装置。
【請求項4】
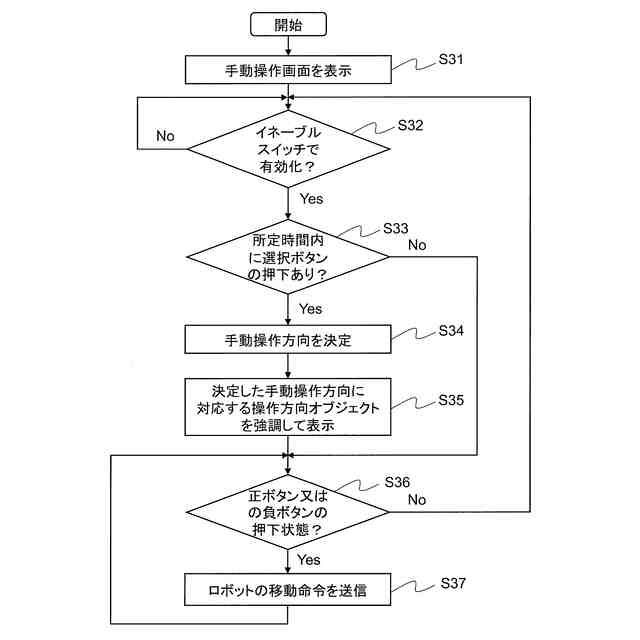
前記外付け操作ユニットは、更に、前記ロボットの操作を有効化するイネーブルスイッチと、前記手動操作方向の選択を切り替える選択ボタンと、を有し、
前記携帯端末は、前記イネーブルスイッチが押下されてから所定時間内に前記選択ボタンが押下されると、前記選択ボタンが押下された回数に基づいて前記手動操作方向を決定することを特徴とする請求項1に記載のロボット操作装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、タッチパネルディスプレイを有する携帯端末を用いたロボット操作装置に関するものである。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
産業用ロボットの教示に用いられるロボット操作装置(ティーチペンダントとも言う。)としては、タッチパネルではないディスプレイに情報が表示され、物理的なボタンによって操作するボタン式が知られている。また、ロボット操作装置としては、タッチパネルディスプレイを有する汎用のタブレット端末やスマートフォン等の携帯端末を用いたタッチパネル式(特許文献1参照)も知られている。近年は、ディスプレイの大型化の要求等に応えるため、タッチパネル式が増えている。
【先行技術文献】
【特許文献】
【0003】
特開2021-167065号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1を含む従来のタッチパネル式の技術では、タッチパネルディスプレイに表示される仮想的なボタンをタッチした時の感触が無いことや、反応速度が遅くなるといった問題が解消できておらず、操作性が低下する。操作性を向上させるために、タッチパネルディスプレイに物理的なボタンを外付け操作ユニットとして外付けする技術も周知であるが、物理的なボタンが多くなると、携帯性が低下し、コストも増加する。
【0005】
本発明は、前述した問題点に鑑みてなされたものであり、その目的とすることは、外付け操作ユニットを用いたとしても、物理的なボタンの数が少なく、操作性が高いロボット操作装置を提供することである。
【課題を解決するための手段】
【0006】
前述した目的を達成するための本発明は、タッチパネルディスプレイを有する携帯端末と外付け操作ユニットとを有するロボット操作装置であって、前記外付け操作ユニットは、手動操作による前記ロボットの手動操作方向の正の向きへの移動を指示する正ボタンと、前記手動操作方向の負の向きへの移動を指示する負ボタンと、を有し、前記携帯端末は、前記タッチパネルディスプレイ又は前記外付け操作ユニットに対する入力に基づいて前記手動操作方向を決定し、前記正ボタン又は前記負ボタンが押下されている間、決定された前記手動操作方向の正の向き又は負の向きへの移動命令を前記ロボットに送信することを特徴とするロボット操作装置である。
【0007】
前記携帯端末は、前記タッチパネルディスプレイに手動操作画面を表示し、前記手動操作画面に表示される操作方向オブジェクトがタッチされると、タッチされた前記操作方向オブジェクトに基づいて前記手動操作方向を切り替えるとともに、切り替えた前記手動操作方向に対応する前記操作方向オブジェクトを強調して表示するようにしても良い。
【0008】
また、前記携帯端末は、前記タッチパネルディスプレイに手動操作画面を表示し、前記手動操作画面に表示される操作向きオブジェクトがタッチされると、タッチされた前記操作向きオブジェクトに基づいて前記手動操作方向を切り替えるとともに、切り替えた前記手動操作方向に対応する前記操作向きオブジェクトを強調して表示し、更に、前記操作向きオブジェクトがタッチされている間、タッチされている前記操作向きオブジェクトに対応する前記手動操作方向の向きへの移動命令を前記ロボットに送信するようにしても良い。
【0009】
また、前記外付け操作ユニットは、更に、前記ロボットの操作を有効化するイネーブルスイッチと、前記手動操作方向の選択を切り替える選択ボタンと、を有し、前記携帯端末は、前記イネーブルスイッチが押下されてから所定時間内に前記選択ボタンが押下されると、前記選択ボタンが押下された回数に基づいて前記手動操作方向を決定するようにしても良い。
【発明の効果】
【0010】
本発明により、外付け操作ユニットを用いたとしても、物理的なボタンの数が少なく、操作性が高いロボット操作装置を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
ドリル
2日前
株式会社不二越
ロボット
15日前
株式会社不二越
駆動伝達機構
2日前
株式会社不二越
X線測定装置
3日前
株式会社不二越
X線測定装置
3日前
株式会社不二越
油圧システム
3日前
株式会社不二越
搬送システム
5日前
株式会社不二越
電磁弁制御装置
19日前
株式会社不二越
圧力制御システム
15日前
株式会社不二越
超硬合金製ドリル
15日前
株式会社不二越
垂直多関節ロボット
16日前
株式会社不二越
通り穴加工用タップ
23日前
株式会社不二越
クラッチアクチュエータ
8日前
株式会社不二越
異常検知装置及びプログラム
3日前
株式会社不二越
二次電池用通電部品およびその製造方法
25日前
株式会社不二越
酸化皮膜形成用合金鋼、電食防止部品およびその製造方法
15日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
23日前
株式会社不二越
ロボット
15日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社イノウ
給油口キャップ用開閉具
16日前
川崎重工業株式会社
制動システム
15日前
住友重機械工業株式会社
ロボット
9日前
庄内機械株式会社
釘打装置
2日前
株式会社アイエイアイ
グリッパー
4日前
株式会社不二越
垂直多関節ロボット
16日前
アイホン株式会社
ネジ締めカウントシステム
17日前
芝浦機械株式会社
双腕ロボット
8日前
トヨタ自動車東日本株式会社
搬送治具
2日前
トヨタ自動車株式会社
荷姿影響緩和方法
5日前
パナソニック株式会社
工具
16日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ