TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025051217
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023160224
出願日
2023-09-25
発明の名称
バール
出願人
個人
代理人
弁理士法人日峯国際特許事務所
主分類
B25C
11/00 20060101AFI20250328BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】木材間に隙間がない場合でも木材を引き離して容易に釘を抜くことができるバールを提供する。
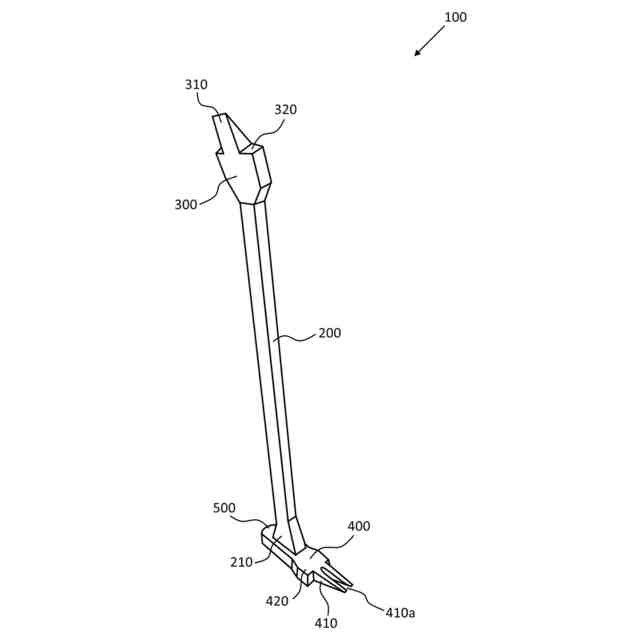
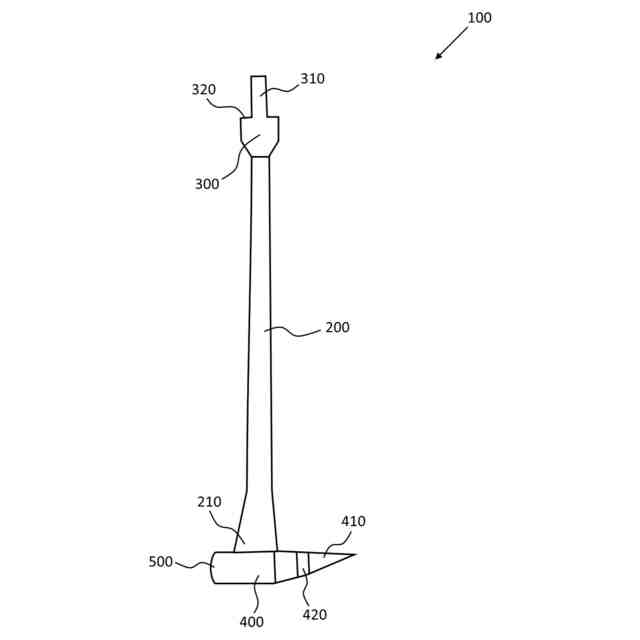
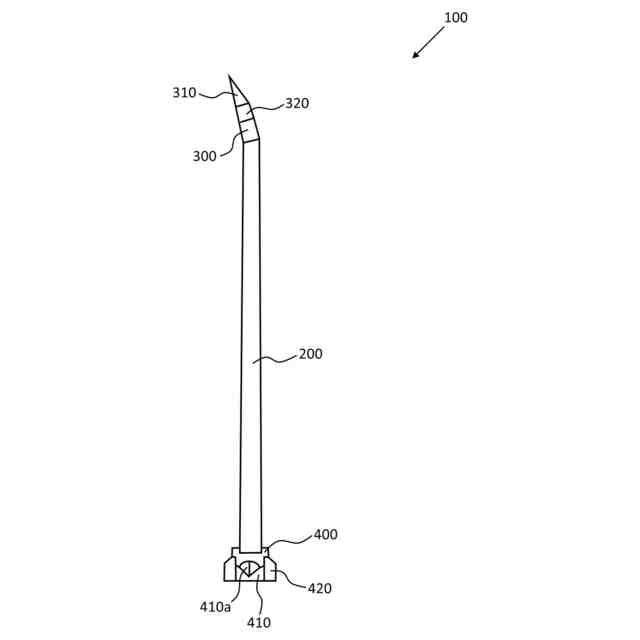
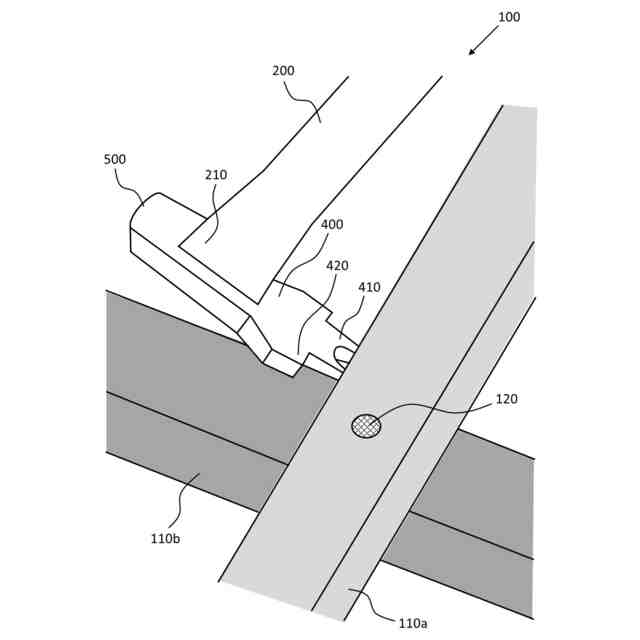
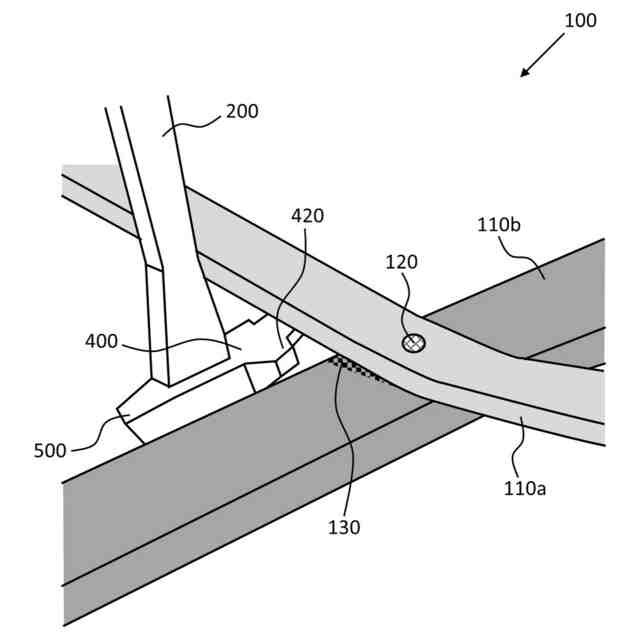
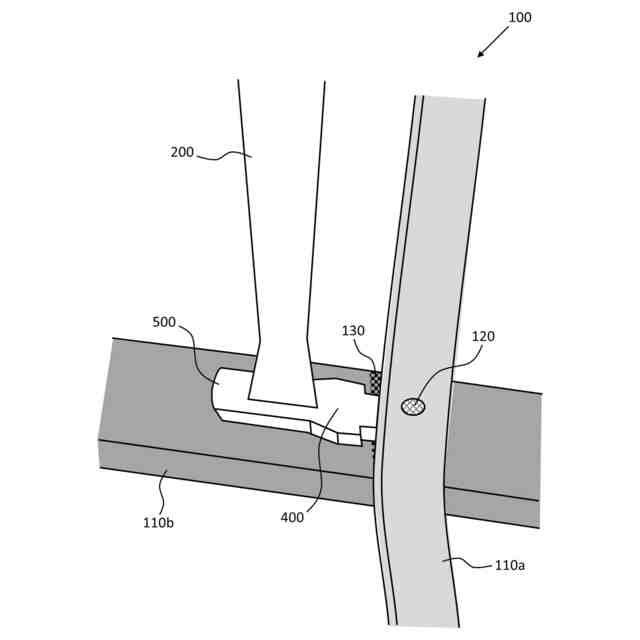
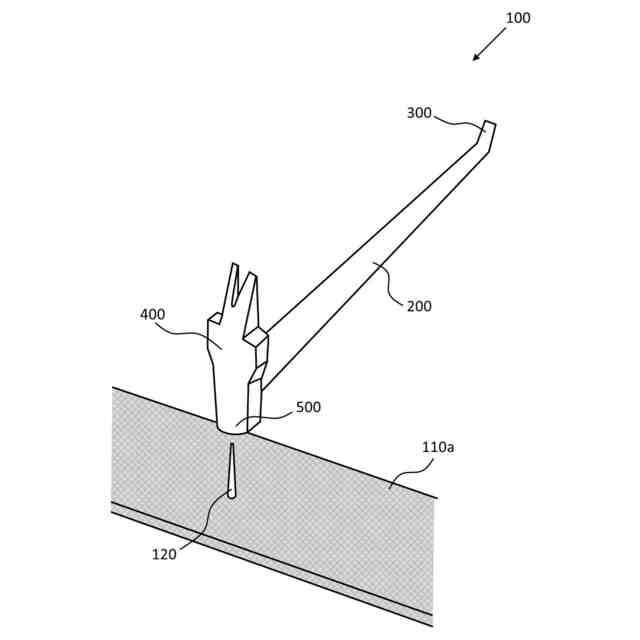
【解決手段】バールは、棒状のシャフト部の一端側に前記シャフト部と垂直に取り付けられた先端の釘抜部にV字溝が形成されたヘッド部、及び前記シャフト部の他端側に先端が爪部であるグリップ部を有し、前記釘抜部より後側に前記ヘッド部の両側方へ突出する張出部を設け、前記爪部より下側に前記グリップ部の両側方へ突出する張出部を設け、前記ヘッド部の後側にハンマー部を設けた、ことを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
棒状のシャフト部の一端側に前記シャフト部と垂直に取り付けられた先端の釘抜部にV字溝が形成されたヘッド部を有し、
前記釘抜部より後側に前記ヘッド部の両側方へ突出する張出部を設けた、
ことを特徴とするバール。
続きを表示(約 160 文字)
【請求項2】
前記シャフト部の他端側に先端が爪部であるグリップ部を有し、
前記爪部より下側に前記グリップ部の両側方へ突出する張出部を設けた、
ことを特徴とする請求項1に記載のバール。
【請求項3】
前記ヘッド部の後側にハンマー部を設けた、
ことを特徴とする請求項1に記載のバール。
発明の詳細な説明
【技術分野】
【0001】
本発明は、釘を抜くためのバールに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
バールは、木材等に打ち込まれた釘を梃(テコ)の原理を利用して引き抜くための棒状の工具であり、主に金属製で一方の先端が曲げられてL字状になっている。また、両端に釘抜きが付いているものや、曲げた反対側にハンマーを付けてT字状になっているものもある。
【0003】
特許文献1に記載されているように、長い釘でも面倒な準備をすることなく容易に引き抜くことができ、嵩張らず、しかも構造が単純で製造しやすい釘抜き工具の発明も開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第5046346号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
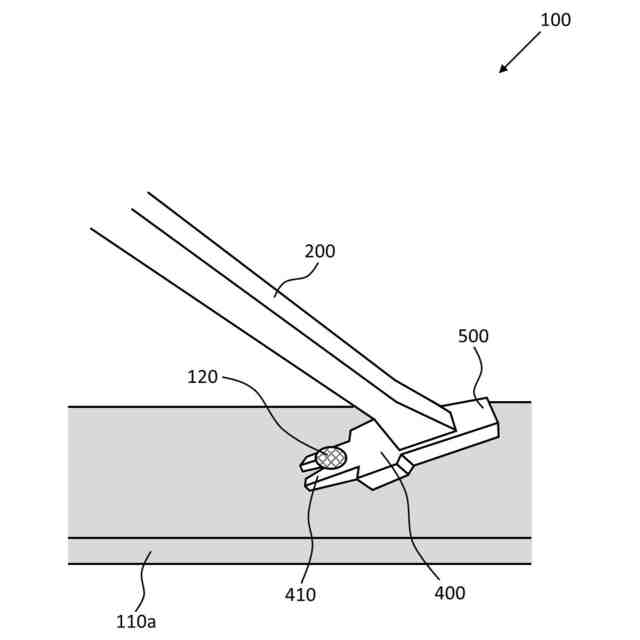
しかしながら、特許文献1に記載の釘抜き工具は、作用部の略V字形状の切り欠きに釘の頭部を掛けて、支点部を支点として、副作用部が円弧を描くように、梃の原理で柄部を後方に動かすことで釘を抜くが、木材等に釘が打ち込まれている場合、釘の頭部が木材等の上面から突出していないと釘抜き工具の略V字形状の切り欠きに掛けることはできない。そのため、釘抜き工具の尖った先端などで木材等を刳り貫いて無理矢理に釘の頭部を出した上で、略V字形状の切り欠きに掛ける等している。
【0006】
また、下側の木材と上側の木材とを釘で留めている場合、木材間に隙間があれば、釘抜き工具の尖った先端などを挿し込んで上下に隙間を拡げながら釘を抜くこともできるが、木材間に隙間がない状態で釘を抜くことは困難である。釘抜き工具など梃の原理を利用するには、支点と作用点を確保する必要がある。
【0007】
そこで、本発明は、木材間に隙間がない場合でも木材を引き離して容易に釘を抜くことができるバールを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、本発明であるバールは、棒状のシャフト部の一端側に前記シャフト部と垂直に取り付けられた先端の釘抜部にV字溝が形成されたヘッド部を有し、前記釘抜部より後側に前記ヘッド部の両側方へ突出する張出部を設けた、ことを特徴とする。
【0009】
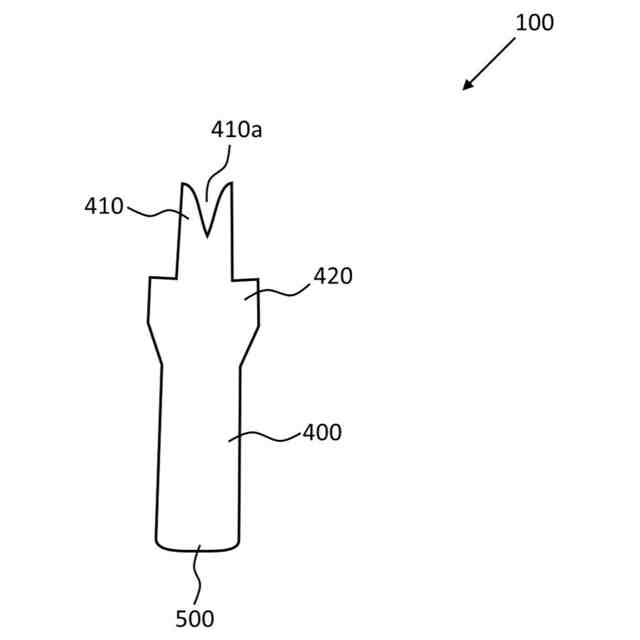
前記バールにおいて、前記シャフト部の他端側に先端が爪部であるグリップ部を有し、前記爪部より下側に前記グリップ部の両側方へ突出する張出部を設けた、ことを特徴とする。
【0010】
前記バールにおいて、前記ヘッド部の後側にハンマー部を設けた、ことを特徴とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
電動ドライバ
5日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社ダイヘン
移動体
8日前
株式会社不二越
ロボット
2か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
関節機構
10日前
株式会社エビス
腰ベルト用連結具
1か月前
個人
深孔スリーブ駆動ロッド構造
2か月前
株式会社不二越
ロボット操作装置
2か月前
東京都公立大学法人
対象物把持装置
19日前
川崎重工業株式会社
ロボット
2か月前
株式会社デンソー
操縦桿
2か月前
個人
バール
2か月前
学校法人五島育英会
アーム機構
10日前
株式会社スター精機
吸着パッド
4日前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
4日前
株式会社黒澤鉄工製作所
けがき用治具
2か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
株式会社アイエイアイ
グリッパー
25日前
梅馨堂合同会社
人協働ロボットシステム
2か月前
庄内機械株式会社
釘打装置
23日前
住友重機械工業株式会社
ロボット
1か月前
川崎重工業株式会社
制動システム
1か月前
株式会社PILLAR
チューブ保持治具
15日前
ARMA株式会社
UI付エンドエフェクタ
2か月前
オークラ輸送機株式会社
ハンド装置
18日前
株式会社スター精機
産業用ロボット
2日前
株式会社不二越
垂直多関節ロボット
1か月前
株式会社マキタ
電動作業機
11日前
芝浦機械株式会社
双腕ロボット
29日前
株式会社マキタ
電動作業機
11日前
株式会社リコー
多関節ロボット
9日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
トヨタ自動車東日本株式会社
搬送治具
23日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































