TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043415
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023150654
出願日
2023-09-19
発明の名称
UI付エンドエフェクタ
出願人
ARMA株式会社
代理人
個人
主分類
B25J
9/22 20060101AFI20250325BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットのダイレクトティーチング等に際して、エンドエフェクタが自立して作業部の動作等を制御し効率性および正確性をより向上させることができ、ロボットシステムの状態や状況をロボットシステムの操作盤の表示器で確認することなくエンドエフェクタで確認でき、ロボットシステムの操作盤や制御盤を介さずエンドエフェクタから情報を得て作業者が対応およびロボットシステムとの連携が可能となり、より付加価値の高い作業をより容易かつ低廉に実現可能なUI付エンドエフェクタを提供する。
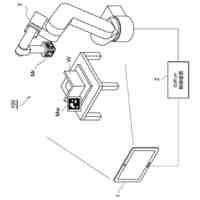
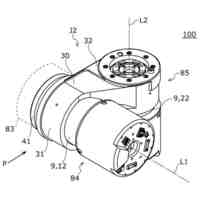
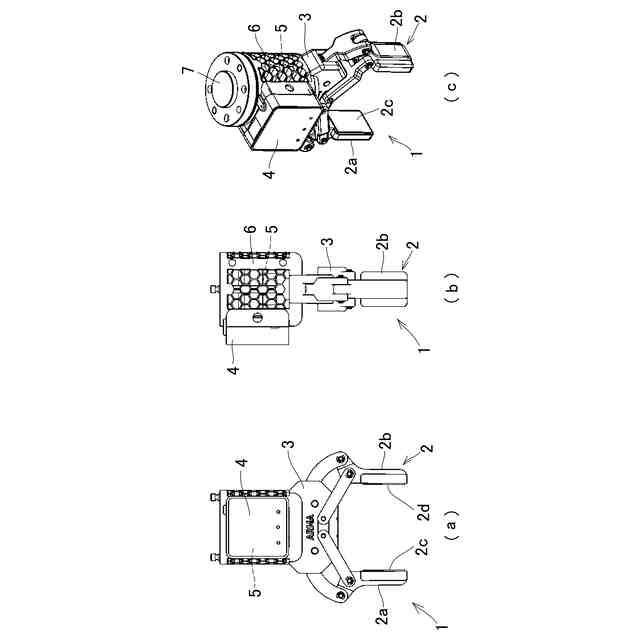
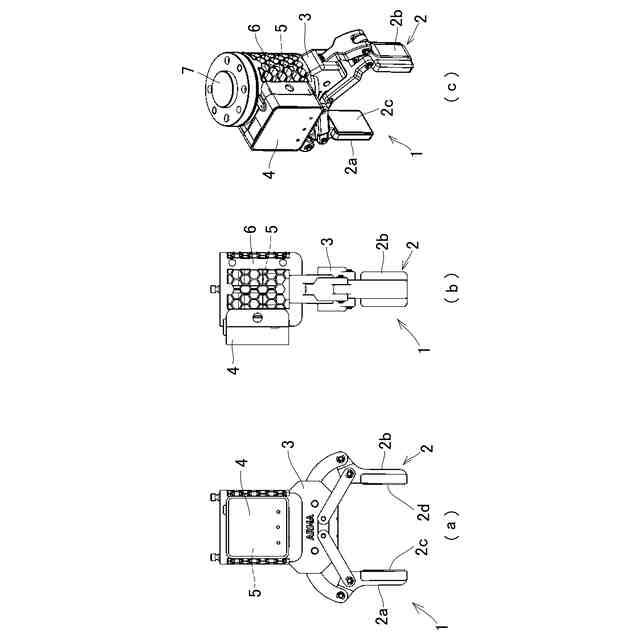
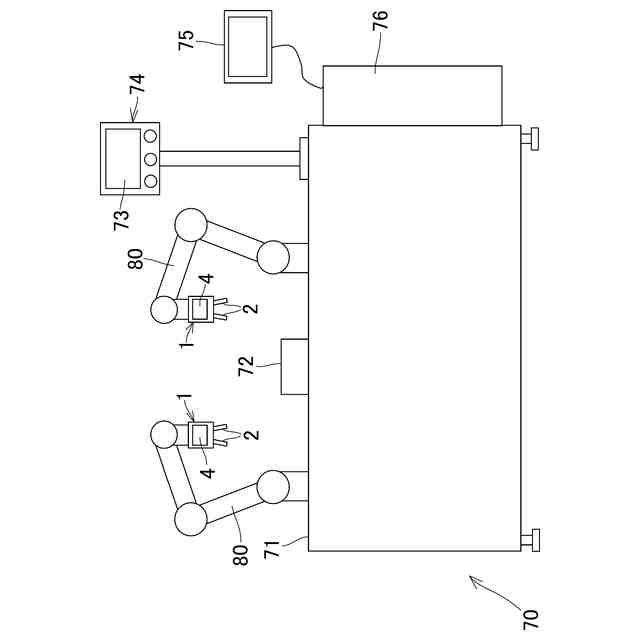
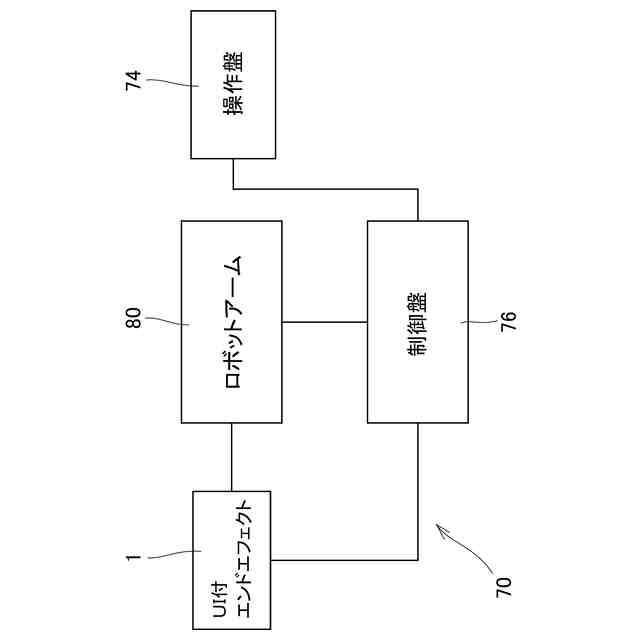
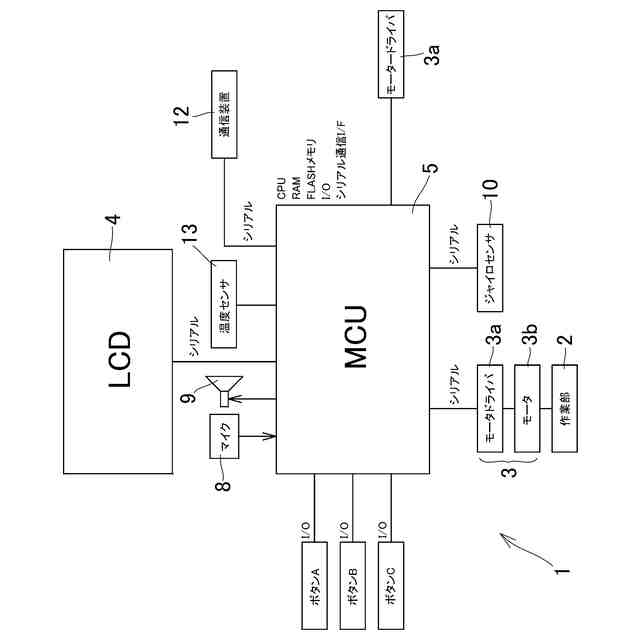
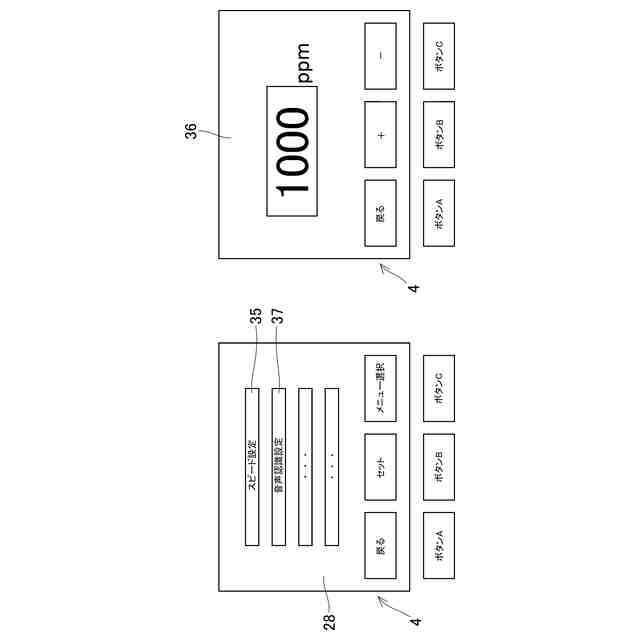
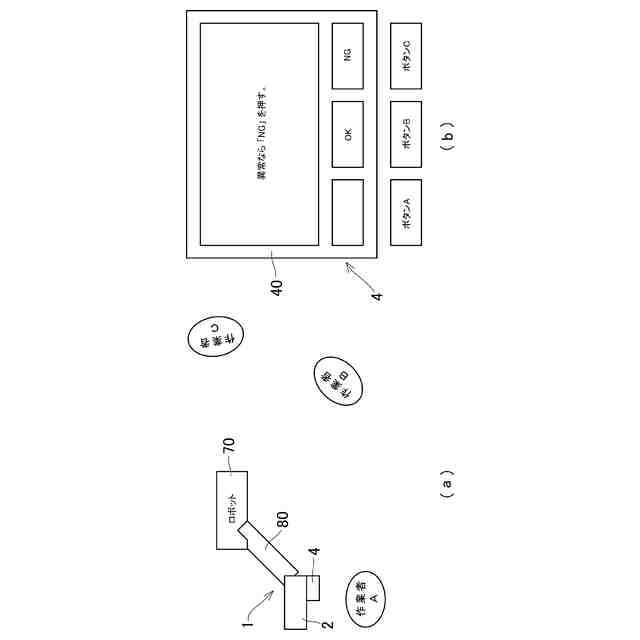
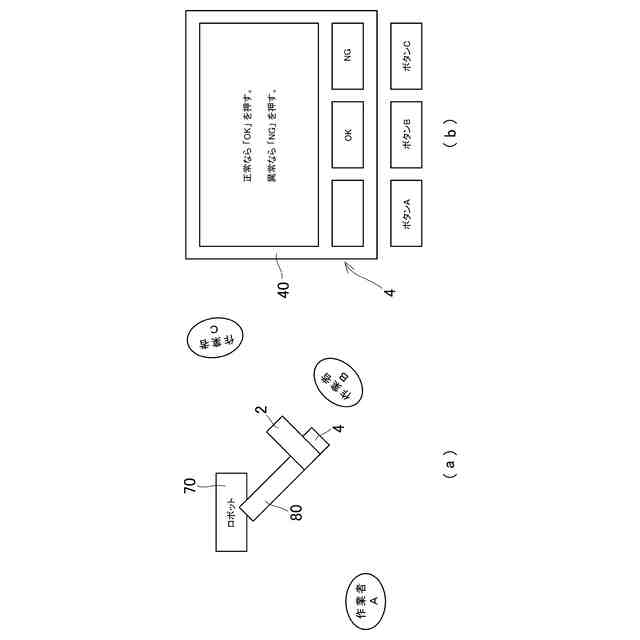
【解決手段】本発明のUI付エンドエフェクタ1は、ロボットアーム80の先端に接続可能なUI付エンドエフェクタであって、作業部2と、作業部2を駆動させるための作業駆動部3と、ディスプレイを備えたユーザーインターフェース4と、作業駆動部3およびユーザーインターフェース4を自立して制御可能な制御部5を有している。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットアームの先端に接続可能なUI付エンドエフェクタであって、作業部と、該作業部を駆動させるための作業駆動部と、ディスプレイを備えたユーザーインターフェース(UI)とを有していることを特徴とするUI付エンドエフェクタ。
続きを表示(約 640 文字)
【請求項2】
前記ユーザーインターフェース(UI)は、タッチパネルディスプレイである請求項1に記載のUI付エンドエフェクタ。
【請求項3】
前記UI付エンドエフェクタは、前記作業駆動部および前記ユーザーインターフェース(UI)を自立して制御可能な制御部を有している請求項1または2に記載のUI付エンドエフェクタ。
【請求項4】
前記UI付エンドエフェクタはマイクおよびスピーカーを有し、前記マイクおよび前記スピーカーは前記制御部により自立して制御可能に構成されている請求項3に記載のUI付エンドエフェクタ。
【請求項5】
前記UI付エンドエフェクタはジャイロセンサを有し、前記ジャイロセンサは前記制御部により自立して制御可能に構成されている請求項3に記載のUI付エンドエフェクタ。
【請求項6】
前記UI付エンドエフェクタはカメラを有し、前記カメラは前記制御部により自立して制御可能に構成されている請求項3に記載のUI付エンドエフェクタ。
【請求項7】
前記UI付エンドエフェクタは通信装置を有し、前記通信装置は前記制御部により自立して制御可能に構成されている請求項3に記載のUI付エンドエフェクタ。
【請求項8】
前記UI付エンドエフェクタは温度センサを有し、前記温度センサは前記制御部により自立して制御可能に構成されている請求項3に記載のUI付エンドエフェクタ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットアームの先端に接続可能なUI付エンドエフェクタに関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来より、ロボットアームの先端に接続可能なエンドエフェクタが種々提案されている。例えばそのようなものとして、特許第7084135号公報のエンドエフェクタ等がある。これら従来のエンドエフェクタはロボットアームと共にロボットシステムの制御盤で制御され動作するように構成されていた。また、従来のエンドエフェクタは、UI(ユーザーインターフェース)を備えておらず、ユーザーインターフェースからの入力等に基づいてエンドエフェクタを自立制御できるものが存在しなかった。
【0003】
具体的には、例えばロボットのダイレクトティーチングでは、ロボットの動作とエンドエフェクタの動作を教示するが、エンドエフェクタの作業部が例えば対象ワークを掴むグリッパの場合、把持力(トルク)と掴むスピードは予め設定しておかなければならなかった。すなわち、従来のダイレクトティーチングでは、ティーチングペンダントで把持力やスピードの設定をエンドエフェクタ用に割り付けられたI/Oで直接コントロールしており、グリッパでインチング動作をしながら、把持力(トルク)やスピードを調整することはできなかった。
【0004】
また、ロボットに取り付けられたエンドエフェクタはロボット側の指令で動作するため、エンドエフェクタが教示中に作業部を独立して動作(例えばグリッパの開閉動作)させることはできなかった。
【0005】
さらに、オンオフ制御以外の高機能制御を持ったエンドエフェクタの場合、ロボットに割り付けるかロボットシステムの制御盤に接続しなければならなかった。
【0006】
さらに、複数のロボットおよび作業者で作業する場合でも、複数のロボットはロボットシステムの制御盤でコントロールされ、操作盤は基本的に一つで構成されていた。そのため、エラー発生時の生産状況等はロボットシステムの操作盤の表示器でのみしか確認できないという問題があった。
【0007】
さらに、複数のロボットによる高度な連携作業を行うために、複数の操作盤を用意するとコストが嵩むという問題もあった。
【先行技術文献】
【特許文献】
【0008】
特許第7084135号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
そこで、本願発明者は上記問題を一挙に解決することができる発明を想起したものであり、すなわち、本発明の課題は、ロボットのダイレクトティーチング等に際して、エンドエフェクタが自立して作業部の動作等を制御し効率性および正確性をより向上させることができ、ロボットシステムの状態や状況をロボットシステムの操作盤の表示器で確認することなくエンドエフェクタで確認でき、ロボットシステムの操作盤や制御盤を介さずエンドエフェクタから情報を得て作業者が対応およびロボットシステムとの連携が可能となり、より付加価値の高い作業をより容易かつ低廉に実現可能なUI付エンドエフェクタを提供することにある。
【課題を解決するための手段】
【0010】
上記課題を解決するものは、ロボットアームの先端に接続可能なUI付エンドエフェクタであって、作業部と、該作業部を駆動させるための作業駆動部と、ディスプレイを備えたユーザーインターフェース(UI)とを有していることを特徴とするUI付エンドエフェクタである(請求項1)。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
24日前
株式会社不二越
ロボット
16日前
株式会社エビス
腰ベルト用連結具
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
工機ホールディングス株式会社
作業機
1か月前
個人
バール
1か月前
川崎重工業株式会社
制動システム
16日前
住友重機械工業株式会社
ロボット
10日前
株式会社イノウ
給油口キャップ用開閉具
17日前
株式会社アイエイアイ
グリッパー
5日前
庄内機械株式会社
釘打装置
3日前
株式会社不二越
垂直多関節ロボット
17日前
トヨタ自動車東日本株式会社
搬送治具
3日前
芝浦機械株式会社
双腕ロボット
9日前
アイホン株式会社
ネジ締めカウントシステム
18日前
トヨタ自動車株式会社
荷姿影響緩和方法
6日前
パナソニック株式会社
工具
17日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
17日前
学校法人法政大学
装着型アシスト装置
1か月前
住友重機械工業株式会社
ロボット及びカバー
10日前
株式会社マキタ
電動工具
3日前
アピュアン株式会社
エアー式衝撃工具
1か月前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社ダイヘン
端末装置
3日前
株式会社マキタ
打ち込み工具
18日前
株式会社マキタ
打ち込み工具
3日前
株式会社マキタ
打ち込み工具
3日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
10日前
住友重機械工業株式会社
アクチュエータ支持部材
9日前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
インパクト工具
1か月前
SB C&S株式会社
治具セット
1か月前
株式会社不二越
ロボットの教示システム及び教示方法
1か月前
中国電力株式会社
電動ドライバー
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ