TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025059610
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169809
出願日
2023-09-29
発明の名称
電動ドライバー
出願人
中国電力株式会社
代理人
弁理士法人一色国際特許事務所
主分類
B25B
23/12 20060101AFI20250403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】一定の磁力でネジを吸着保持し、安定したネジの取り付け作業及び取り外し作業を行える電動ドライバーを提供する。
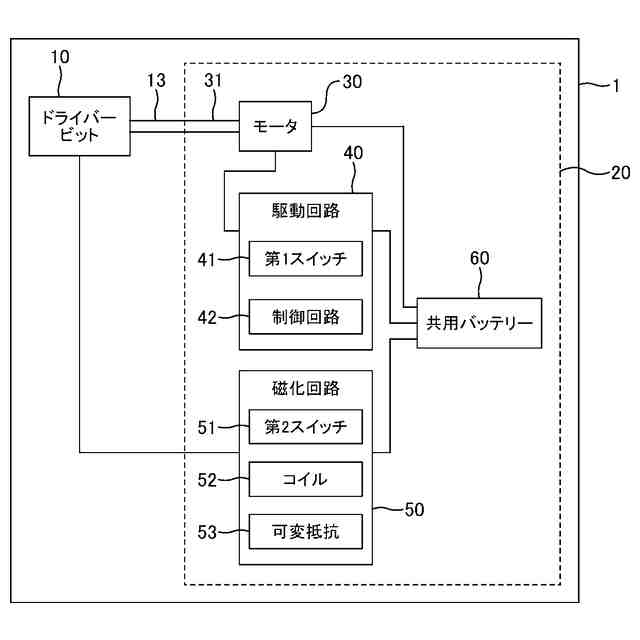
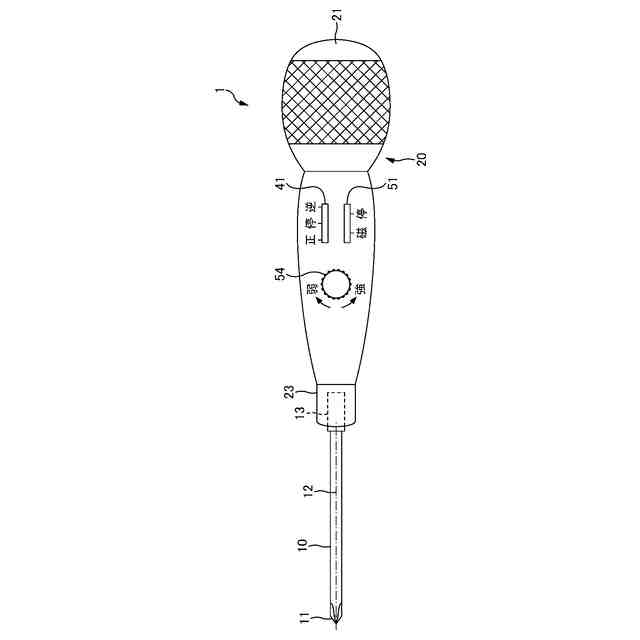
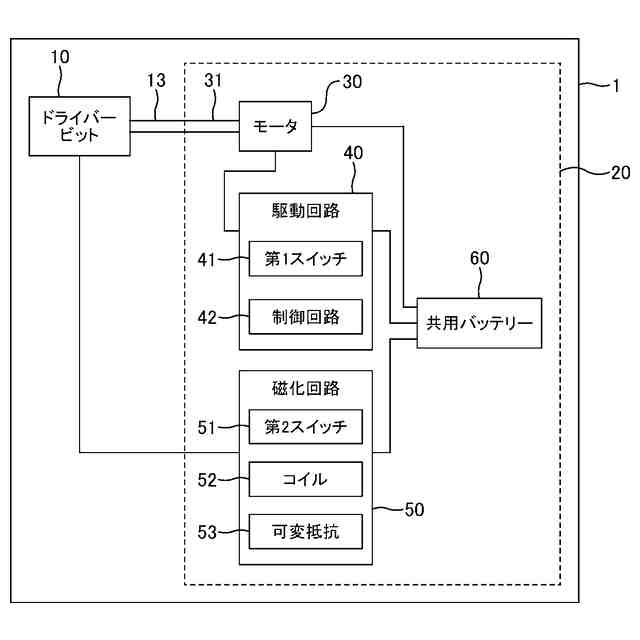
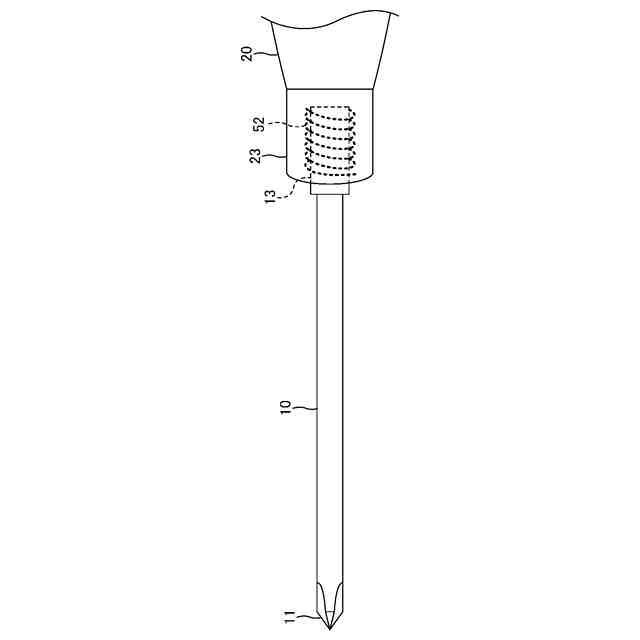
【解決手段】電動ドライバーであって、本体と、前記本体に回転自在に装着されるドライバービットと、前記ドライバービットを回転させるモータと、前記モータを駆動する駆動回路と、前記ドライバービットを磁化する磁化回路と、前記駆動回路及び磁化回路に電力を供給する共用バッテリーと、を含む。
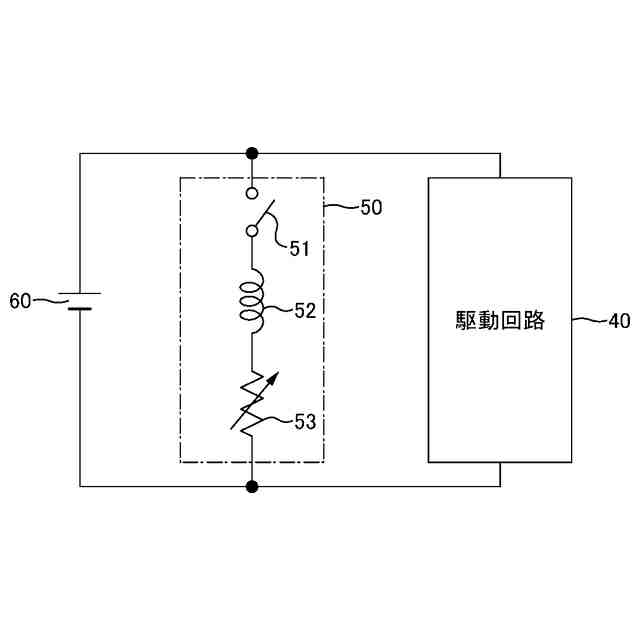
【選択図】図2
特許請求の範囲
【請求項1】
本体と、
前記本体に回転自在に装着されるドライバービットと、
前記ドライバービットを回転させるモータと、
前記モータを駆動する駆動回路と、
前記ドライバービットを磁化する磁化回路と、
前記駆動回路及び前記磁化回路に電力を供給する共用バッテリーと、
を含む電動ドライバー。
続きを表示(約 530 文字)
【請求項2】
請求項1に記載の電動ドライバーであって、
前記磁化回路は、
前記ドライバービットの回転軸を中心に前記ドライバービットの周囲に巻回されるコイルと、
前記コイルに流れる電流の大きさを調整する可変抵抗と、を含み、
前記本体に収容される
電動ドライバー。
【請求項3】
請求項2に記載の電動ドライバーであって、
前記駆動回路を通電させる第1スイッチと、
前記磁化回路を前記第1スイッチとは独立して通電させる第2スイッチと、
を含む電動ドライバー。
【請求項4】
請求項2に記載の電動ドライバーであって、
前記駆動回路と前記磁化回路とを連動して通電させるスイッチと、
を含む電動ドライバー。
【請求項5】
請求項2に記載の電動ドライバーであって、
前記本体は、前記ドライバービットが回転自在に装着されるように、前記ドライバービットの一端を保持するチャック部を含み、
前記コイルは、前記チャック部と、前記チャック部に保持された前記ドライバービットの一端と、の間に配置される
電動ドライバー。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ドライバービットを磁化する機能を備えた電動ドライバーに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
例えば、非磁性体からなる本体部と、本体部に収容される永久磁石と、永久磁石と面するように、本体部に装着される磁性体からなるドライバービットと、を含み、ドライバービットがネジを吸着保持することができるように、永久磁石によってドライバービットを磁化するドライバーが知られている(例えば特許文献1)。
【0003】
また、磁性体からなるドライバービットの周囲を取り囲むように筒形状の磁着補助具を装着し、磁着補助具によってドライバービットを磁化するドライバーも知られている(例えば特許文献2)。
【先行技術文献】
【特許文献】
【0004】
特開平8-25242号公報
特許6085740号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1,2に開示されたドライバーの場合、個体ごとにドライバービットの磁力の大きさがばらつき、一定の磁力でネジを吸着保持することができなくなる虞があった。
【0006】
また、特許文献2に開示されたドライバーの場合、磁着補助具の径はドライバービットの径よりも大きいことから、比較的狭い空間でネジの取り付け作業又は取り外し作業を行おうとすると、磁着補助具がネジの周囲の物体に干渉してしまい、或いは、磁着補助具を介してドライバービットがネジの周囲の金属物に引き寄せられてしまい、磁着補助具がネジの取り付け作業又は取り外し作業の妨げとなる虞があった。
【0007】
本発明は上記課題を鑑みてなされたものであり、一定の磁力でネジを吸着保持し、安定したネジの取り付け作業及び取り外し作業を可能とする電動ドライバーを提供することを1つの目的とする。
【課題を解決するための手段】
【0008】
上記の目的を達成するための本発明のうちの1つは、電動ドライバーであって、本体と、前記本体に回転自在に装着されるドライバービットと、前記ドライバービットを回転させるモータと、前記モータを駆動する駆動回路と、前記ドライバービットを磁化する磁化回路と、前記駆動回路及び前記磁化回路に電力を供給する共用バッテリーと、を含む。
【0009】
本発明の電動ドライバーによれば、ネジの取り付け作業及び取り外し作業を行うときに、磁化回路を用いて電気的にドライバービットを磁化することから、電動ドライバーの経年年数や、電動ドライバーを使用する周囲環境等に関わらず、ドライバービットを予め設定された一定の磁力で磁化することが可能となる。
【0010】
また、上記の目的を達成するための本発明のうちの他の1つは、電動ドライバーにおいて、前記磁化回路は、前記ドライバービットの回転軸を中心に前記ドライバービットの周囲に巻回されるコイルと、前記コイルに流れる電流の大きさを調整する可変抵抗と、を含み、前記本体に収容される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
中国電力株式会社
電動ドライバー
1か月前
中国電力株式会社
フルフェイス形面体
1か月前
中国電力株式会社
間接活線工具支持具
2日前
中国電力株式会社
スプレー容器保持用治具及びそれを備えた杖
5日前
中国電力株式会社
伐採支援システムおよび伐採支援プログラム
6日前
中国電力株式会社
情報処理装置、情報処理方法、及びプログラム
5日前
中国電力株式会社
情報処理装置、情報処理方法、及びプログラム
5日前
中国電力株式会社
フォールトツリー図評価装置、フォールトツリー図作成装置、およびフォールトツリー図評価方法
1か月前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
23日前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
6日前
株式会社PILLAR
チューブ保持治具
2日前
株式会社アイエイアイ
グリッパー
12日前
住友重機械工業株式会社
ロボット
17日前
川崎重工業株式会社
制動システム
23日前
株式会社イノウ
給油口キャップ用開閉具
24日前
庄内機械株式会社
釘打装置
10日前
株式会社不二越
垂直多関節ロボット
24日前
オークラ輸送機株式会社
ハンド装置
5日前
トヨタ自動車東日本株式会社
搬送治具
10日前
アイホン株式会社
ネジ締めカウントシステム
25日前
芝浦機械株式会社
双腕ロボット
16日前
トヨタ自動車株式会社
荷姿影響緩和方法
13日前
パナソニック株式会社
工具
24日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
24日前
株式会社マキタ
電動工具
10日前
アピュアン株式会社
エアー式衝撃工具
1か月前
住友重機械工業株式会社
ロボット及びカバー
17日前
個人
回転移動式工具ホルダ
4日前
株式会社ダイヘン
端末装置
10日前
住友重機械工業株式会社
アクチュエータ支持部材
16日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
17日前
株式会社マキタ
打ち込み工具
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ