TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025059982
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170432
出願日
2023-09-29
発明の名称
ロボットの教示システム及び教示方法
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20250403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
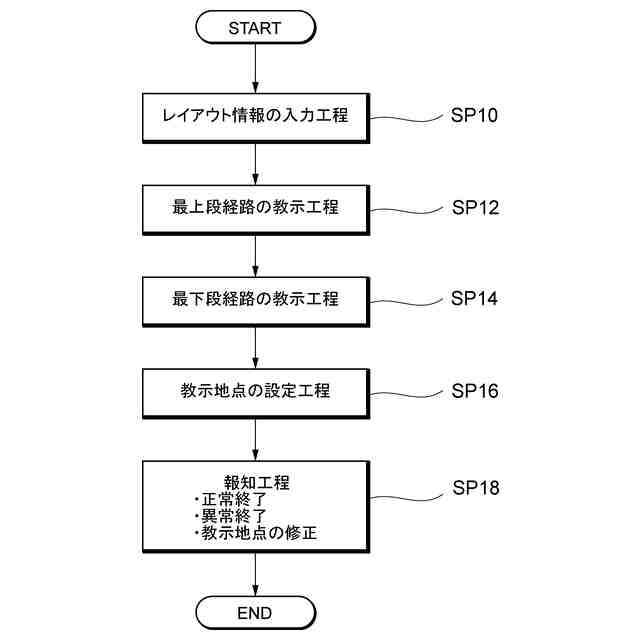
【課題】複数の教示地点を設定する際に、教示作業に要する工数を削減しつつも教示精度の低下を抑制可能な、ロボットの教示システム及び教示方法を提供する。
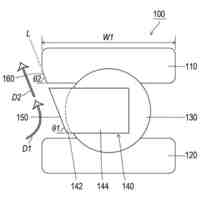
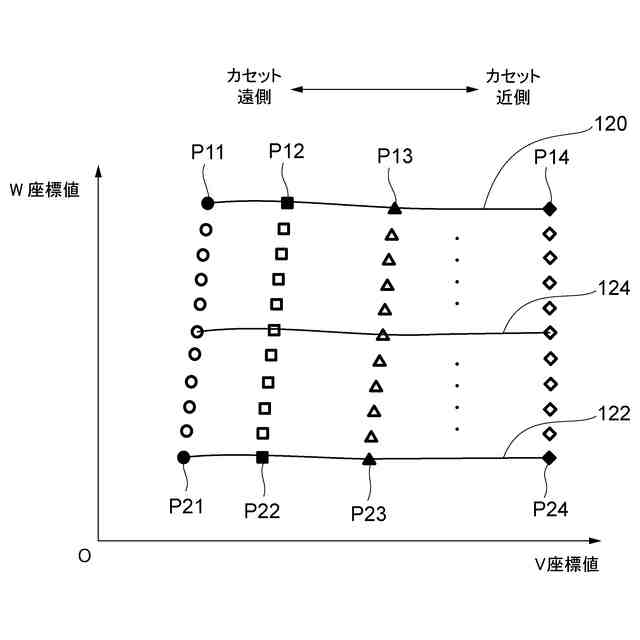
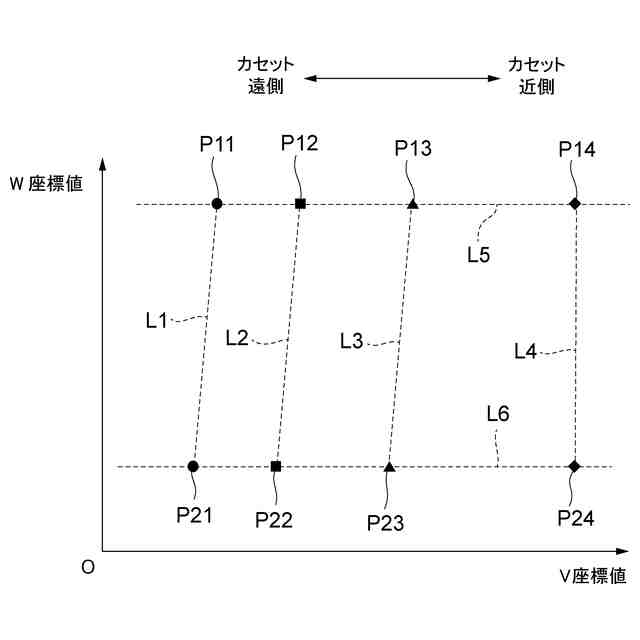
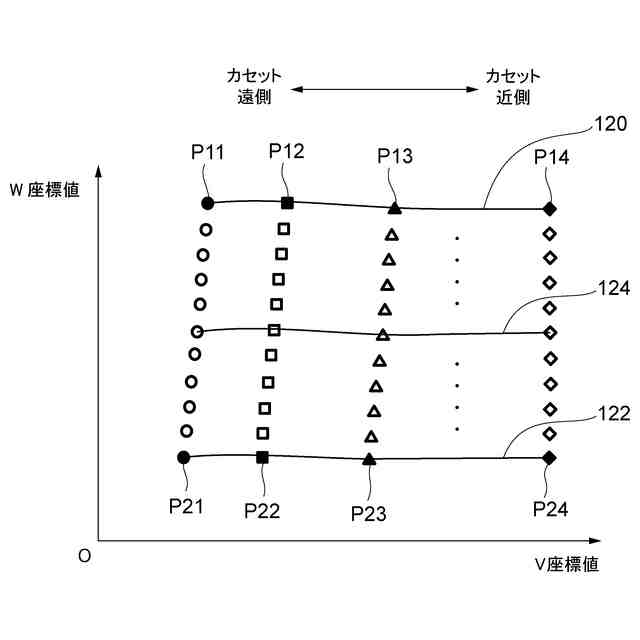
【解決手段】教示システム(10)の制御装置(14)は、ロボット(12)の動作経路の内、第一経路(120)上の少なくとも一つの第一地点からなる第一地点群と、第一経路(120)とは異なる第二経路(122)上の少なくとも一つの第二地点からなる第二地点群とを指定する教示操作を受け付けた場合、第一地点群及び第二地点群を教示地点として設定するとともに、第一経路(120)と第二経路(122)の間にある第三経路(124)上の少なくとも一つの第三地点からなる第三地点群を教示地点として設定する。
【選択図】図7
特許請求の範囲
【請求項1】
ロボットと、
前記ロボットの教示地点を指定する教示操作を受け付ける教示端末と、
機械座標空間を示す三次元座標系に基づいて前記ロボットの動作制御を行うとともに、前記教示端末からの前記教示操作を受け付ける制御装置と、
を備え、
前記制御装置は、前記ロボットの動作経路の内、第一経路上の少なくとも一つの第一地点からなる第一地点群と、前記動作経路の内、前記第一経路とは異なる第二経路上の少なくとも一つの第二地点からなる第二地点群とを指定する前記教示操作を受け付けた場合、前記第一地点群及び前記第二地点群を前記教示地点として設定するとともに、前記動作経路の内、前記第一経路と前記第二経路との間にある第三経路上の少なくとも一つの第三地点からなる第三地点群を前記教示地点として設定するデータ処理を行うデータ処理部を備えることを特徴とする、ロボットの教示システム。
続きを表示(約 1,300 文字)
【請求項2】
前記制御装置は、前記機械座標空間上における前記ロボットの位置・姿勢の状態を示す複数の状態量を取得する取得部をさらに備え、
前記複数の状態量は、前記第一地点に対応する第一状態量の集合体である第一状態量セット、及び、前記第二地点に対応する第二状態量の集合体である第二状態量セットを含み、
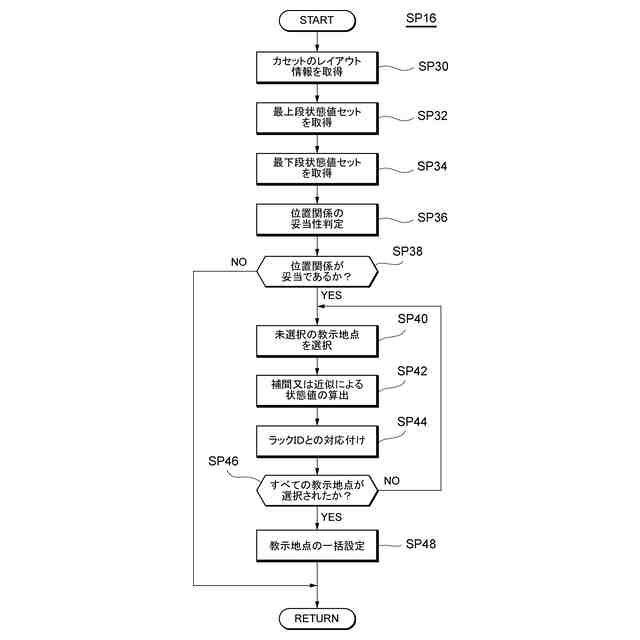
前記データ処理は、前記取得部により取得された前記第一状態量セット及び前記第二状態量セットを用いて補間演算又は近似演算を施し、前記第三地点に対応する第三状態量の集合体である第三状態量セットを算出する算出処理を含む、ことを特徴とする請求項1に記載の、ロボットの教示システム。
【請求項3】
前記第二地点の数は、前記第一地点の数に等しく、
前記補間演算又は前記近似演算は、各地点の配列順に対応する前記第一状態量及び前記第二状態量の組を用いて行われる、ことを特徴とする請求項2に記載の、ロボットの教示システム。
【請求項4】
前記データ処理は、一次元又は二次元に区画される複数の区画領域の相対的位置関係を示すレイアウト情報を用いて、前記ロボットが前記区画領域にアクセスするための前記第三経路をそれぞれ特定し、前記第三経路を前記区画領域の識別情報と対応付ける対応付け処理を含む、ことを特徴とする請求項2に記載の、ロボットの教示システム。
【請求項5】
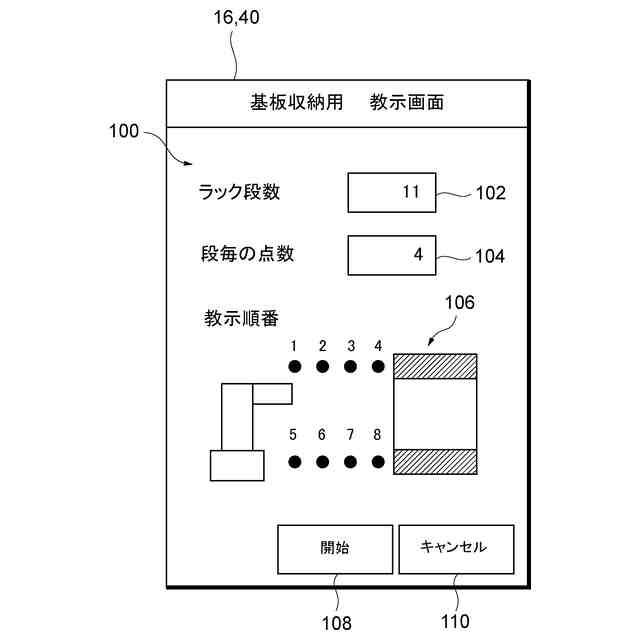
前記教示端末は、前記教示操作を受け付ける前又は受け付けている途中に、前記第一地点群及び前記第二地点群における前記教示地点の指定順番を案内するガイダンス情報を出力する、ことを特徴とする請求項1に記載の、ロボットの教示システム。
【請求項6】
前記制御装置は、前記第一地点同士の位置関係、前記第二地点同士の位置関係、又は前記第一地点と前記第二地点との間の位置関係を判定する判定部をさらに備え、
前記教示端末は、前記判定部による判定結果に応じて異なる報知情報を出力する、ことを特徴とする請求項1に記載の、ロボットの教示システム。
【請求項7】
ロボットと、前記ロボットの教示地点を指定する教示操作を受け付ける教示端末と、機械座標空間を示す三次元座標系に基づいて前記ロボットの動作制御を行うとともに、前記教示端末からの前記教示操作を受け付ける制御装置と、を備えるシステムを用いた、ロボットの教示方法であって、
前記ロボットの動作経路の内、第一経路上の少なくとも一つの第一地点からなる第一地点群と、前記動作経路の内、前記第一経路とは異なる第二経路上の少なくとも一つの第二地点からなる第二地点群とを指定する前記教示操作を受け付けるステップと、
前記制御装置が、前記第一地点群及び前記第二地点群を前記教示地点として設定するとともに、前記動作経路の内、前記第一経路と前記第二経路との間にある第三経路上の少なくとも一つの第三地点からなる第三地点群を前記教示地点として設定するデータ処理を行う処理ステップと、
を前記制御装置が実行することを特徴とする、ロボットの教示方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに教示を行うための教示システム及び教示方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
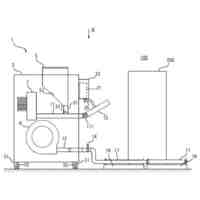
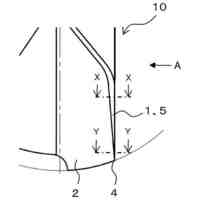
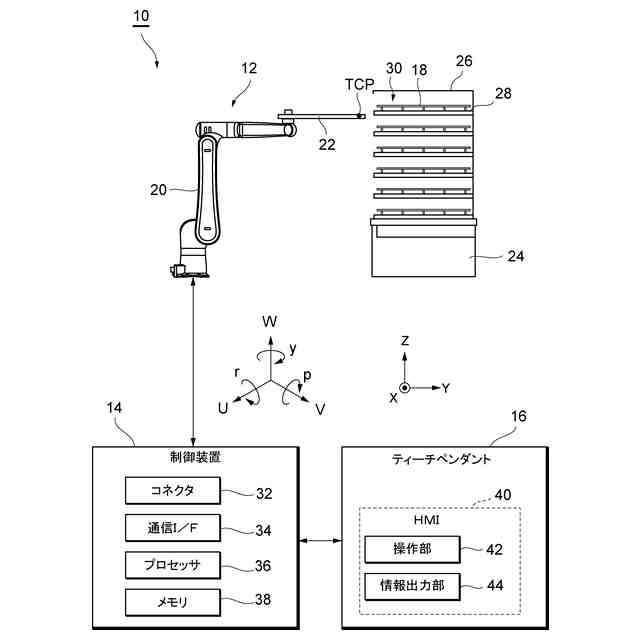
産業用ロボットの技術分野において、ロボットに所望の動作を行わせるべく、ロボットに対してロボットの位置・姿勢を教示するティーチング(あるいは、教示作業)が行われる。この教示作業は、例えば、複数の基板を収納可能なカセットに基板を搬入し、あるいは基板をカセットから搬出する「搬送作業」にも適用することができる。
【0003】
特許文献1には、カセットへの進入位置及び基板の吸着位置に対してシフト演算を行うことにより、ロボットの動作制御を行う制御装置が開示されている。ここで、「シフト演算」とは、カセット内に設けられる最下段のラックの位置を基準点とし、当該基準点からの段差を考慮した演算であると解される。
【先行技術文献】
【特許文献】
【0004】
特開2005-066771号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、ロボットは、装置固有に定義される三次元座標系、すなわち機械座標空間上での制御下において動作する。したがって、特許文献1に開示される「シフト演算」は、カセットが配置される実空間と上記した機械座標空間との相対的位置関係が既知である場合に限り、一意に特定することができる。
【0006】
特に、上記した搬送作業において、非常に狭いラック間の隙間に対して基板の挿入及び搬出を行うことが多いため、ツールの位置・姿勢を高精度に制御する必要がある。上記したシフト演算を用いて搬送動作を行う場合、カセットの座標空間系とロボットの機械座標系との間の変換行列を高精度で定義する必要がある。また、変換行列が高精度に定義できたとしても、ロボットの機体差に起因する誤差、あるいは、減速機又はアームのたわみに起因する誤差が生じるため、教示の精度が低下する場合がある。
【0007】
これに対して、ラックの段毎に教示作業を行うことにより教示の精度を高めることができるが、教示点数が増加すればその分だけ教示作業に要する工数が増加するという問題があった。
【0008】
本発明はこのような問題に鑑みてなされたものであり、その目的は、複数の教示地点を設定する際に、教示作業に要する工数を削減しつつも教示精度の低下を抑制可能な、ロボットの教示システム及び教示方法を提供することにある。
【課題を解決するための手段】
【0009】
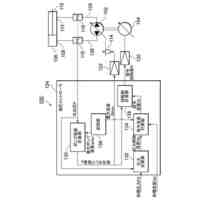
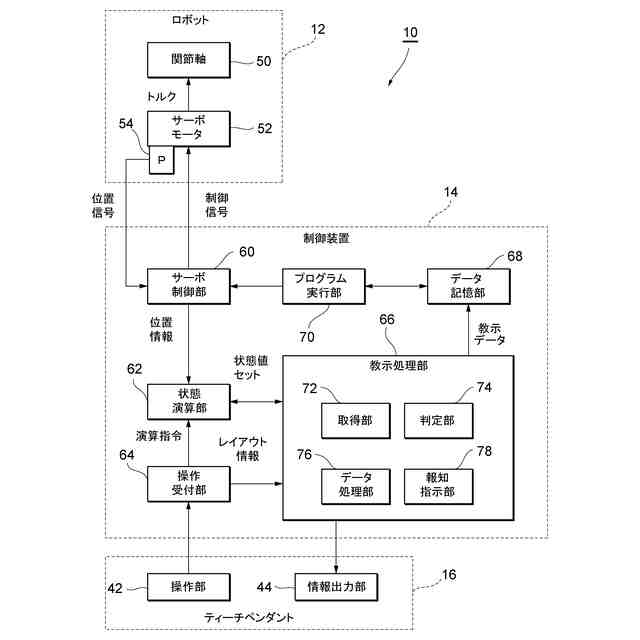
本発明の第一態様におけるロボットの教示システムは、ロボットと、前記ロボットの教示地点を指定する教示操作を受け付ける教示端末と、機械座標空間を示す三次元座標系に基づいて前記ロボットの動作制御を行うとともに、前記教示端末からの前記教示操作を受け付ける制御装置と、を備え、前記制御装置は、前記ロボットの動作経路の内、第一経路上の少なくとも一つの第一地点からなる第一地点群と、前記動作経路の内、前記第一経路とは異なる第二経路上の少なくとも一つの第二地点からなる第二地点群とを指定する前記教示操作を受け付けた場合、前記第一地点群及び前記第二地点群を前記教示地点として設定するとともに、前記動作経路の内、前記第一経路と前記第二経路との間にある第三経路上の少なくとも一つの第三地点からなる第三地点群を前記教示地点として設定するデータ処理を行うデータ処理部を備える。
【0010】
本発明の第二態様におけるロボットの教示システムでは、前記制御装置は、前記機械座標空間上における前記ロボットの位置・姿勢の状態を示す複数の状態量を取得する取得部をさらに備え、前記複数の状態量は、前記第一地点に対応する第一状態量の集合体である第一状態量セット、及び、前記第二地点に対応する第二状態量の集合体である第二状態量セットを含み、前記データ処理は、前記取得部により取得された前記第一状態量セット及び前記第二状態量セットを用いて補間演算又は近似演算を施し、前記第三地点に対応する第三状態量の集合体である第三状態量セットを算出する算出処理を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
ドリル
1か月前
株式会社不二越
ロボット
1か月前
株式会社不二越
射出成形機
24日前
株式会社不二越
ソレノイド
16日前
株式会社不二越
ソレノイド
26日前
株式会社不二越
搬送システム
1か月前
株式会社不二越
油圧システム
1か月前
株式会社不二越
X線測定装置
1か月前
株式会社不二越
X線測定装置
1か月前
株式会社不二越
駆動伝達機構
1か月前
株式会社不二越
塵埃噴射装置
1か月前
株式会社不二越
波形抽出装置
3日前
株式会社不二越
摩耗判定装置
3日前
株式会社不二越
油圧ユニット
23日前
株式会社不二越
保持器付き軸受
1か月前
株式会社不二越
圧力制御システム
1か月前
株式会社不二越
超硬合金製ドリル
1か月前
株式会社不二越
レースガイド保持器
23日前
株式会社不二越
サーフェスブローチ盤
25日前
株式会社不二越
クラッチアクチュエータ
1か月前
株式会社不二越
真空熱処理装置の排気構造
10日前
株式会社不二越
組立式スカイビングカッタ
17日前
株式会社不二越
スルーフィード式の加工装置
17日前
株式会社不二越
複合加工機およびツーリング
10日前
株式会社不二越
異常検知装置及びプログラム
1か月前
株式会社不二越
シール付き軸受および軸受構造
1か月前
株式会社不二越
不等リードラジアスエンドミル
16日前
株式会社不二越
スラスト自動調心ころ軸受の保持器
23日前
株式会社不二越
軌道生成装置及び軌道生成プログラム
24日前
株式会社不二越
切断刃用合金鋼およびそれを用いた切断刃
25日前
株式会社不二越
超硬合金およびこれを用いた切削加工用工具
18日前
トヨタ紡織株式会社
燃料電池用セパレータ
27日前
株式会社不二越
鉄酸化物膜、合金鋼および鉄酸化物膜形成方法
12日前
株式会社不二越
産業用制御装置及び産業用制御装置の制御方法
1か月前
株式会社不二越
ブレーキ解除回路、ブレーキ解除方法、及び制御システム
26日前
日東精工株式会社
電動ドライバ
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ